(5) ДОЗАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Дозатор | 1988 |
|
SU1682805A1 |
| Устройство для дозирования кормов | 1979 |
|
SU865239A1 |
| Дозирующая насадка для жидкости | 1976 |
|
SU640122A1 |
| ДРОССЕЛИРУЮЩИЙ КЛАПАН И СПОСОБ УВЕЛИЧЕНИЯ РАЗМЕРОВ КАПЕЛЕК ЖИДКОСТИ В ПРОТЕКАЮЩЕМ ЧЕРЕЗ НЕГО ПОТОКЕ ТЕКУЧЕЙ СРЕДЫ | 2005 |
|
RU2386911C2 |
| ДОЗАТОР СЫПУЧЕГО МАТЕРИАЛА | 2013 |
|
RU2542638C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ МЕТАЛЛИЧЕСКОЙ ОБРЕЗИ | 1992 |
|
RU2032490C1 |
| Вакуумный питатель | 1956 |
|
SU108941A1 |
| ГИДРОПОДКОРМЩИК ДЛЯ ОТКРЫТЫХ ОРОСИТЕЛЬНЫХ СИСТЕМ | 1991 |
|
RU2092011C1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА | 2008 |
|
RU2378824C2 |
| Устройство для нанесения покрытия на наружную поверхность труб | 1977 |
|
SU639611A1 |
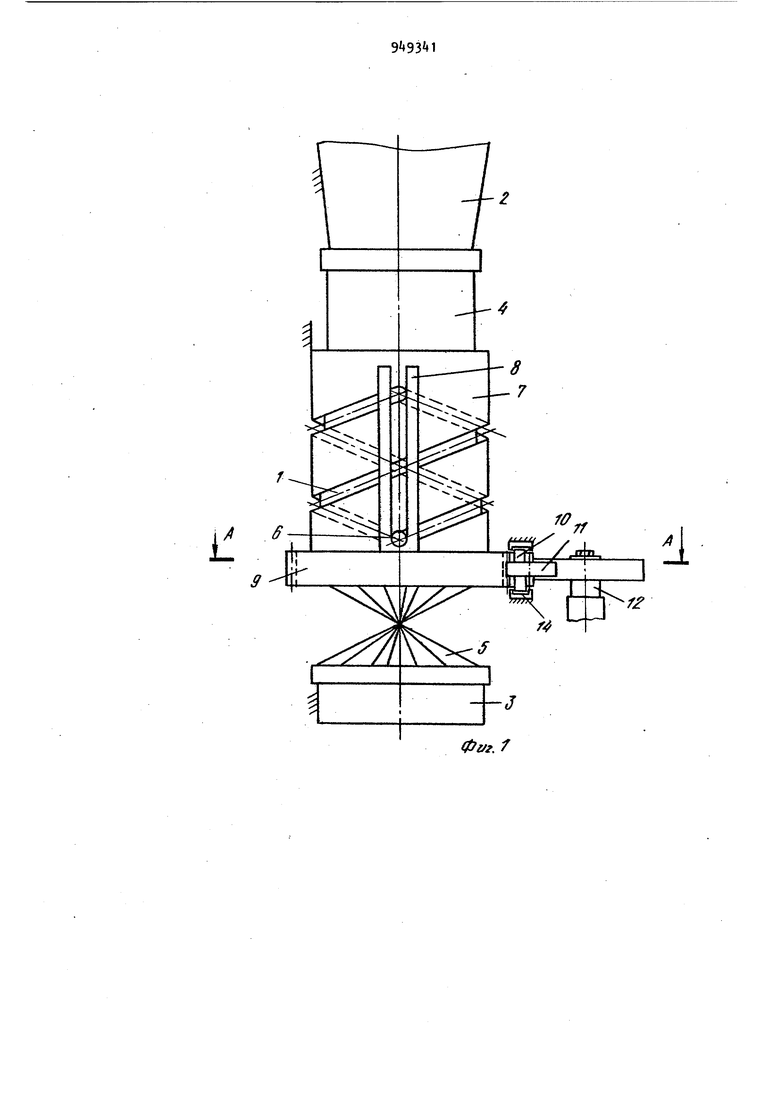
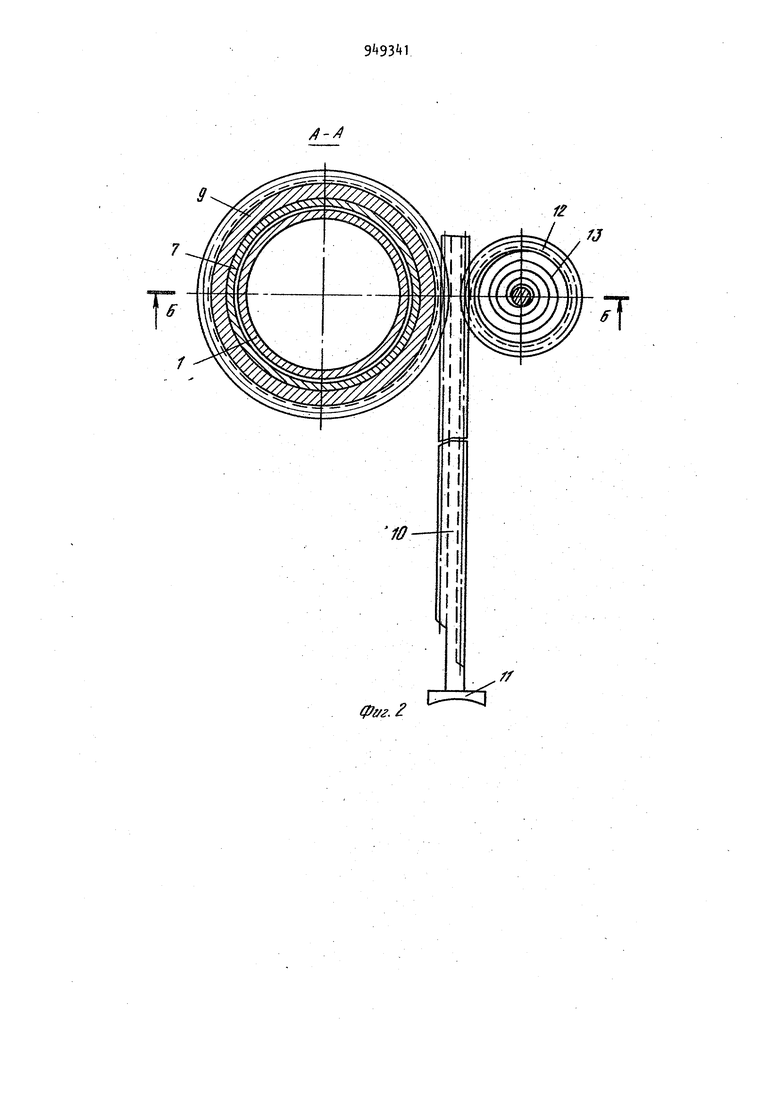
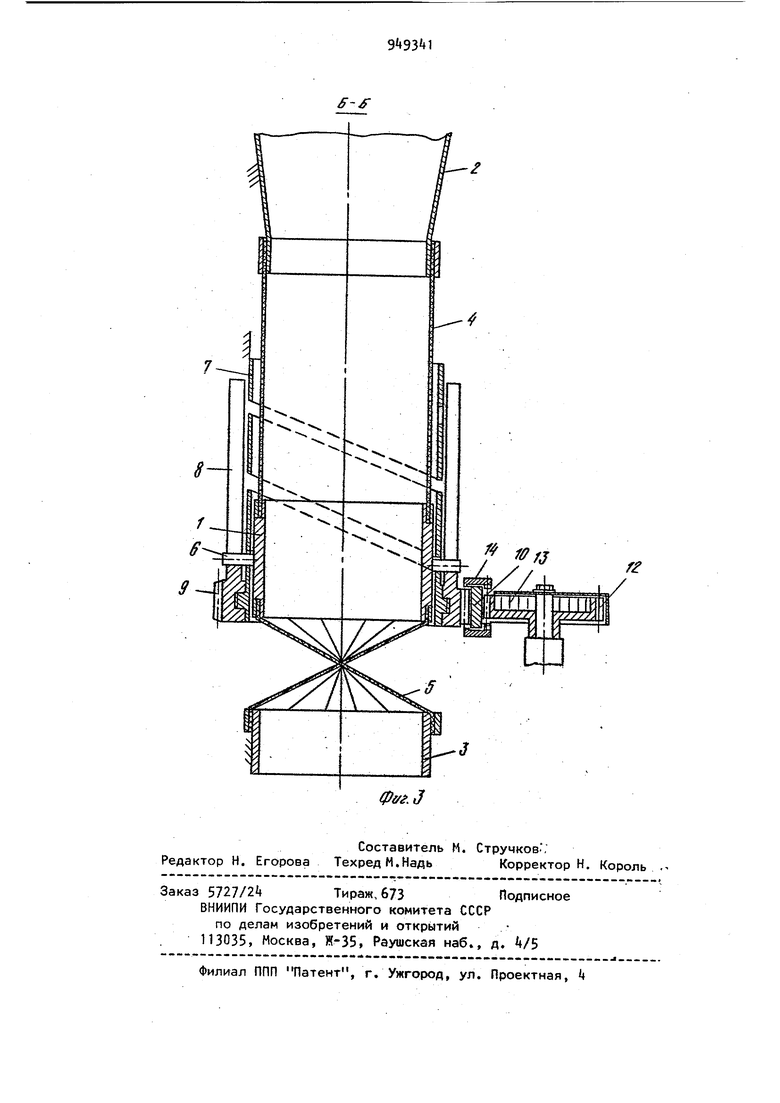
Изобретение относится к дозирую технике и может быть использовано различных областях промышленности, например, в химической, пищевой, в качестве дискретного дозатора в ав матичёских поточных линиях разливки, а для использования в быту. Известен дозатор содержащий мер ник в виде полого корпуса с противоположно расположенными кинематически связанными между собой посредством привода клапанами 13Однако в известном дозаторе дозируемый материал соприкасается с движущимися частями привода клапанов, что снижает надежность работы дозатора. Целью изобретения является повы шение надежности работы дозатора за счет исключения контакта дозиру мой среды с движущимися элементами кинематической связи клапанов Эта цель достигается тем, что в дозаторе, содержащем мерник в виде полого корпуса с противоположно расположенными кинематически связанными между собой посредством привода запорными клапанами, привод выполнен в виде механизма, обеспечивающего винтообразное движение мерника, а запорные клапаны выполнены в виде эластичных рукавов,присоединенных по периметру к мернику, причём один из эластичных рукавов.предварительно закручен на такой угол, что в среднем положении мерника оба клапана закрыты. На фиг. 1 изображен дозатор, общий вид; на фиг. 2 - сечение А-А на фиг.1;на фиг. 3 сечение Б-Б на фиг.2. Дозаторсостоит из мерника 1 с расположенными диаметрально противоположно впускным 2 и выг ускным 3 каналами, соединенными по периметру с 3 . мерником 1 эластичными рукавами k и 5- С внешней стороны мерника 1 же стко закреплены штыри 6, контактирующие с жестко закрепленной направляющей 7, выполненной с пазами в виде двухзаходного винта. Штыри 6 пропущены через вилкообразные поводки 8, которые закреплены на зубчатом колесе 9, расположенном с вне ней стороны направляющей 7. Зубчато колесо 9 контактирует с зубчатой рейкой 10, приводимой в движение ру кояткой 11. Зубчатая рейка 10 конта тирует также с зубчатым колесом 12, внутри которого закреплена спиральная пружина 13. Зубчатая рейка перемещается в направляющих 14. Дозатор работает следующим образом. Подача дозируемого материала про ходит через впускной канал 2. В про цессе образования дозы материала мер ник 1 со штырями б и эластичные рукава 4 и 5 находятся в положении, показанном на фиг.1, 2 и 3. При воздействии на рукоятку 11 происходит перемещение в направляющих 14 зубчатой рейки 10, которая приводит во вращение зубчатые колеса 9 и 12. Зуб чатое колесо 9, на котором закреп- . лены вилкообразные поводки 8, обеспечивает через штыри 6 с помощью направляющей 7 поворот мерника 1, закручивание гибкого рукава 4 и раскручивание гибкого рукава 5. Наступает момент, когда гибкий рукав 4 уже закручен, а гибкий рукав 5 еще не раскручен. Этим достигается отсечение материала. Затем происходит дальнейшее закручивание гибкого рукава 4 и раскручивание гибкого рукава 5) в результатечего происходит выдача отдозированного материала через закручивание спиральной пружины 13, которая после прекращения воздействия на рукоятку 11 приводит систему в исходное положение. Предлагаемый дозатор при простоте конструкции, высокой точности и большой производительности обеспечивает предотвращение контакта движущихся деталей и дозируемого материала. Формула изобретения Дозатор, содержащий мерник в ви-. де полого корпуса с противоположно расположенными кинематически связанными между собой посредством привода запорными клапанами, отличающийся тем, что, с целью повышения надежности работы за счет исключения контакта дозируемой среды с движущимися элементами кинематической связи клапанов, привод выполнен в виде механизма, обеспечивающего винтообразное движение т-черника, а запорные клапаны выполнены в виде эластичных рукавов, присоединенных по периметру к мернику, причем один из эластичных рукавов предварительно закручен на такой угол, что в среднем положении мерника оба клапана закрыты. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 640122, кл. G 01 F 13/00, 1976 (прототип).
li
(SPff.
