(54) УСТРОЙСТВО ДЛЯ ЗАПИСИ ПРОГРАММЫ ОБРАБОТКИ ДЕТАЛЕЙ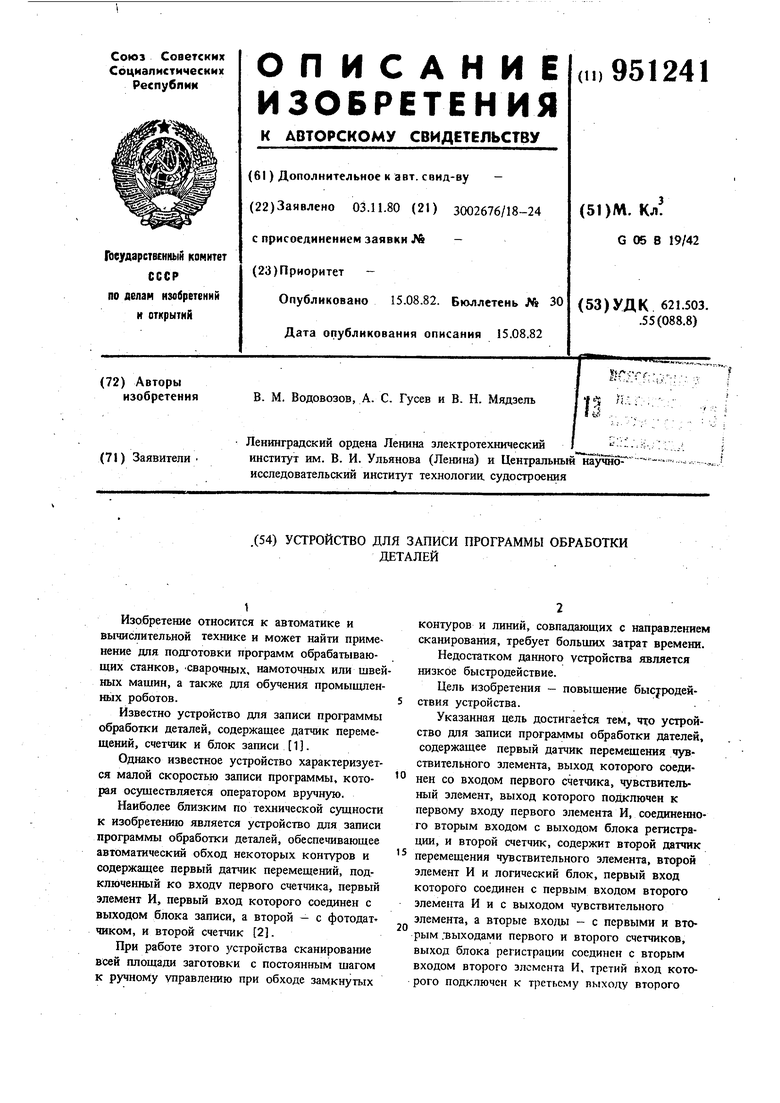
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи программы обработки деталей | 1984 |
|
SU1223211A1 |
| Устройство для измерения ближнего поля антенны | 1984 |
|
SU1164632A1 |
| Устройство для отображения информации | 1986 |
|
SU1401511A1 |
| Устройство для программного управления | 1979 |
|
SU890362A2 |
| Устройство для задания программы | 1986 |
|
SU1363139A1 |
| Вычислительное устройство для термографического анализа кислорода в жидкой стали | 1980 |
|
SU883919A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ЭЛЕКТРОИСКРОВОЙ УСТАНОВКОЙ | 1966 |
|
SU187502A1 |
| Устройство для считывания графической информации | 1984 |
|
SU1295429A1 |
| Прецизионное сканирующее устройство | 1989 |
|
SU1714564A1 |
| Устройство для отображения информации | 1983 |
|
SU1124374A1 |
1
Изобретение относится к автоматике и вычислительной технике и может найти применение для подготовки программ обрабатывающих станков, Сварочных, намоточных или швейных машин, а также для обучения промыщленнь1Х роботов.
Известно устройство для записи программы обработки деталей, содержашее датчик перемещений, счетчик и блок записи 1 .
Однако известное устройство характеризуется малой скоростью записи программы, которая осзтоествляется оператором вручную.
Наиболее близким по технической сущности к изобретению является устройство для записи программы обработки деталей, обеспечивающее автоматический обход некоторых контуров и содержащее первый датчик перемещений, подключенный ко входу первого счетчика, первый элемент И, первый вход которого соединен с выходом блока записи, а второй - с фотодатчиком, и второй счетчик 2.
При работе этого .устройства сканирование всей площади заготовки с постоянным шагом к ручному управлению при обходе замкнутых
контуров и линий, совпадающих с направлением сканирования, требует больших затрат времени.
Недостатком данного устройства является низкое быстродействие.
Цель изобретения - повышение бысуродействия устройства.
Указанная цель достигаемся тем, что устройство для записи программы обработки дателей, содержащее первый датчик перемещения чувствительного элемента, выход которого соеди10нен со входом первого счетчика, чувствительный элемент, выход которого подключен к первому входу первого элемента И, соединенного вторым входом с выходом блока регистрации, и второй счетчик, содержит второй датчик
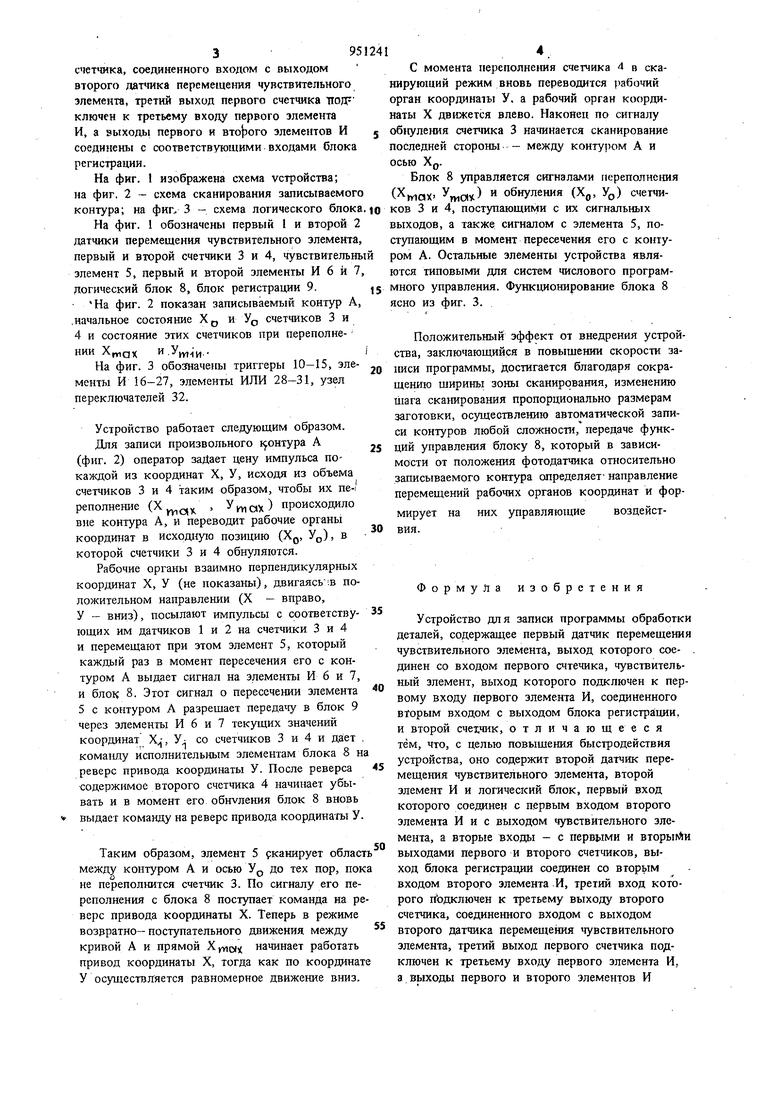
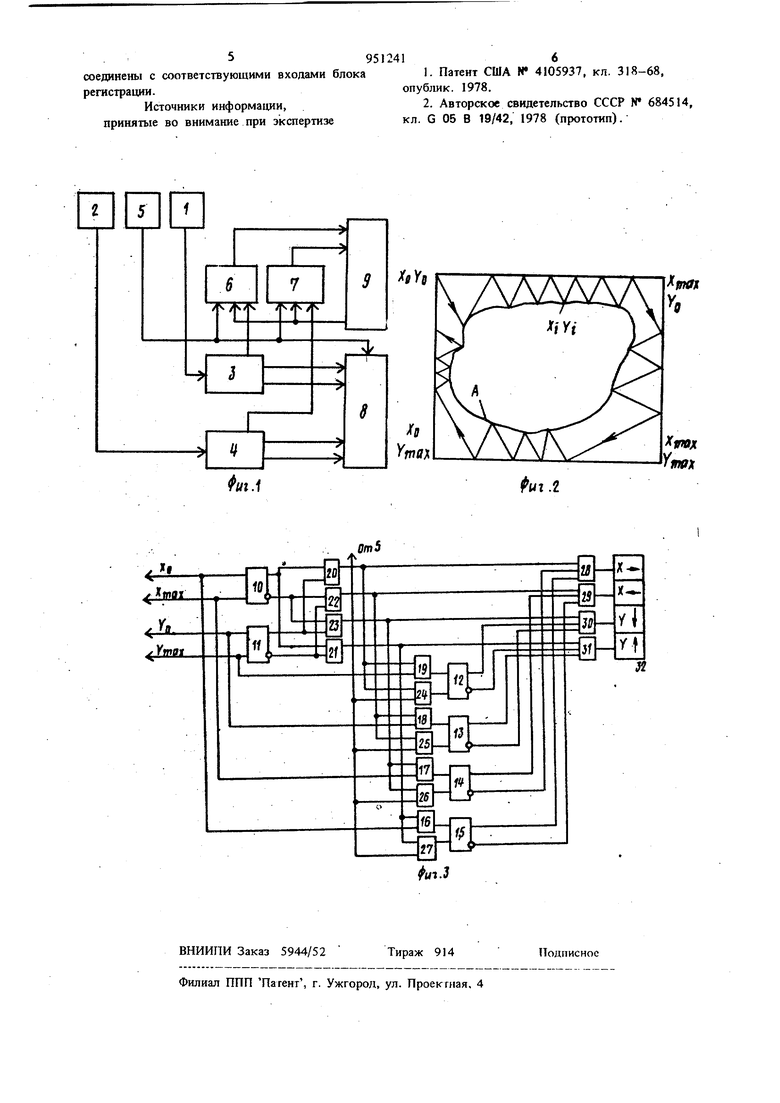
15 перемещения чувствительного элемента, второй элемент И и логический блок, первый вход которого соединен с первым входом второго элемента И и с выходом чувствительного элемента, а вторые входы - с первыми и вто20рым .выходами первого и второго счетчиков, выход блока регистрации соедиисгт с вторым входом второго элемента И, третий вход которого подключен к третьему выходу второго счетчика, соединенного входом с выходом второго датчика перемещения чувствительного элемента, третий выход первого счетчика ключей к третьему входу первого элемента И, а зыходь первого и элементов И соединены с соответствующими входами блока регистрации. На фиг. 1 изображена схема устройства; на фиг. 2 - схема сканирования записываемого контура; на фип 3 - схема логического блока, На фиг. 1 обозначены первый 1 и второй 2 датчики перемещения чувствительного элемента, первый и второй счетчики 3 и 4, чувствительны элемент 5, первый и второй элементы И 6 и 7, догический блок 8, блок регистрации 9. На фиг. 2 показан записываемый контур А, .начальное состояние Х и Уд счетчиков 3 и 4 и состояние этих счетчиков при переполнении И... На фиг. 3 обозначены триггеры 10-15, элементы И 16-27, элементы ИЛИ 28-31, узел переключателей 32. Устройство работает следующим образом. Для записи произвольного 1 онтура А (фиг. 2) оператор заДает цену импульса покаждой из координат X, У, исходя из объема счетчиков 3 и 4 таким образом, чтобы их пе-; реполнение (X j, , У щах) происходило вне контура А, и переводит рабочие органы координат в исходную позицию (Х, У), в которой счетчики 3 и 4 обнуляются. Рабочие органы взаимно перпендикулярных координат X, У (не показаны), двигаясь:в положительном направлении (X - вправо, У - вниз), посылают импульсы с соответствующих им датчиков 1 и 2 на счетчики 3 и 4 и перемещают при этом элемент 5, который каждый раз в момент пересечения его с контуром А выдает сигнал на элементы И 6 и 7, и блок 8. Этот сигнал о пересечении элемента 5 с контуром А разрещает передачу в блок 9 через элементы И 6 и 7 текущих значений координат , У. со счетчиков 3 и 4 и да:ет исполнителыатм элементам блока 8 н реверс привода координаты У. После реверса содержимое второго счетчика 4 начинает убывать и в момент его oбнvлeния блок 8 вновь выдает команду на реверс привода координаты У. Таким образом, элемент 5 сканирует област между контуром А и осью У до тех пор, пок не переполнится счетчик 3. По сигналу его переполнения с блока 8 поступает команда на ре верс привода координаты X. Теперь в режиме возэратно- поступательного движения между кривой А и прямой Xyvioiit начинает работать привод координаты X, тогда как по координат У осуществляется равномерное движение вниз. 951 4. С момента переполне}шя счетчика 4 в сканирующий режим вновь переводится рабочий орган координаты У. а рабочий орган координаты X движется влево. Наконец по сигналу обнуления счетчика 3 начинается сканирование последней стороны- между контуром А и осью XQ. Блок 8 зПравляется сигналами переполнения УЖО обнуления (Х„, У,) счетчиков 3 и 4, поступающими с их сигнальных выходов, а также сигналом с элемента 5, noступающим в момент пересечения его с контуром А. Остальные элементы устройства являются типовыми для систем числового программного управления. Функционирование блока 8 ясно из фиг. 3. Положительный эффект от внедрения устройства, заключающийся в повыщении скорости за1щси программы. Достигается благодаря сокращению щирины зоны сканирования, изменению uiara сканирования пропорционально размерам заготовки, осуществлению автоматической записи контуров любой сложности, передаче функций управления блоку 8, который в зависимости от положения фотодатчика относительно записываемого контура определяет- направление перемещений рабочих органов координат и формирует на них управляющие воздейстВИЯ. Формула изобретения Устройство для записи программы обработки деталей, содержащее первый датчик перемещения чувствительного элемента, выход которого сое- . динен со входом первого счтечика, чувствительный элемент, выход которого подключен к первому входу первого элемента И, соединенного вторым входом с выходом блока регистрации, и второй счетчик, отличающееся тем, что, с целью повыщения быстродействия устройства, оно содержит второй датчик перемещения чувствительного элемента, второй элемент И и логический блок, первый вход которого соединен с первым входом второго элемента И и с выходом чувствительного элемента, а вторые входы - с первыми и вторьпЛи выходами первого и второго счетчиков, выход блока регистрации соединен со вторьгм входом второго элемента .И, третий вход которого пЬдключен к третьему выходу второго счетчика, соединенного входом с выходом второго датчика перемещения чувствительного элемента, третий выход первого счетчика подключен к третьему входу первого элемента И, а.вь1ходы первого и второго элементов И
59512416
соединены с соответствующими входами блока1. Патент США N 4105937, кл. 318-68,
регистрации.опублик. 1978.
Источники информации,2. Авторское свидетельство СССР N 684514,
принятые во внимание при экспертизекл. G 05 В 19/42, 1978 (прототип).
