10
15
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками.
Целью изобретения является расширение функциональных возможностей за счет круговой интерполяции на сферических поверхностях.
На фиг.1 приведена структурная схема предлагаемого устройства; на фиг.2 - пространственная иллюстрация его работы; на фиг.З - схема блока управления,.
Устройство для задания программы состоит из кругового интерполятора 1, линейных интерполяторов 2 и 3 s первого и второго блоков 4 и 5 сложения (унитарных) кодов, первого 6 и второго 7 триггеров, первого 8 и второго 20 9 элементов И, генератора 0 импульсов (высокой частоты), блока 11 управления, первого,- третьего счетчи- KOB 12-14 импульсов,
Счетчики 12-14 импульсов представ- 25 ляют собой обычные счетчики импульсов с возможностью параллельной записи и с выходом переполнения. При записи в них с параллельного входа числа X((3Y, Z) в дополнительном коде 30 (ЛХ + 1, dY + 1 Л2 + 1) и подаче на счетный вход импульсов перемещения (Xj Y, Z) на выходе переполнения появится импульс переполнения при , X ЛХ, (Y Y, Z dZ),
35
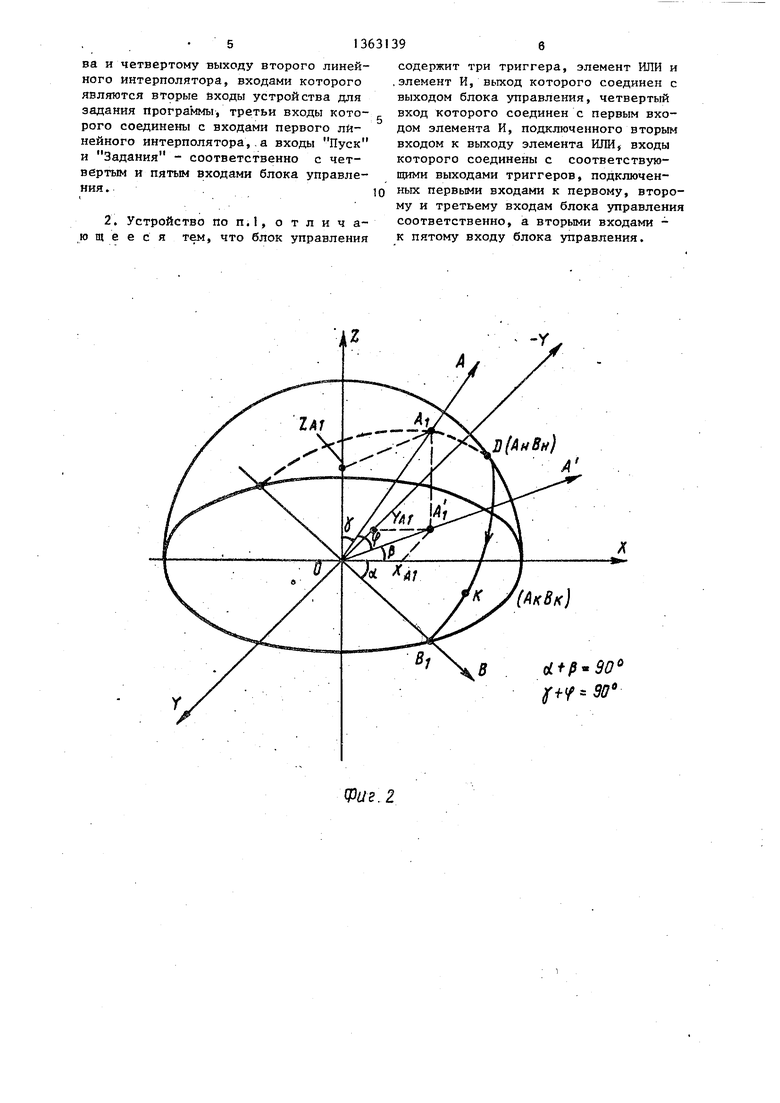
Блок 11 управления содержит триггеры 15-17, элемент ИЖ 18 и элемент И 19.
Принцип действия устройства заключаетс в интерполяции дуги окружности радиуса R (дуга DK) с помощью кругового интерполятора 1 в координатах АВ, задающих плоскость, повернутую на угол 1 к плоскости XY, причем линия пересечения этих плоскостей повернута относительно координаты X на угол о/, с одновременным разлбже- нием приращений координаты А с пот мощью линейного интерполятора 2 на приращения координат станка X, Y, Z, а разложение приращений координаты В - с помощью линейного интерполятора 3 в приращения координат станка X, Y с суммированием (унитарных) кодов одноименных координат (X, Y) интерполяторов 2 и 3 с помощью блоков .4 и 5.
10
15
20
25 30 31392
Перед началом работы информация распределяется по блокам устройства следующим образом,
Координаты точки D в осях АВ, т,ео А„, В„, заносятся в круговой интер35
45
50
55
Н И
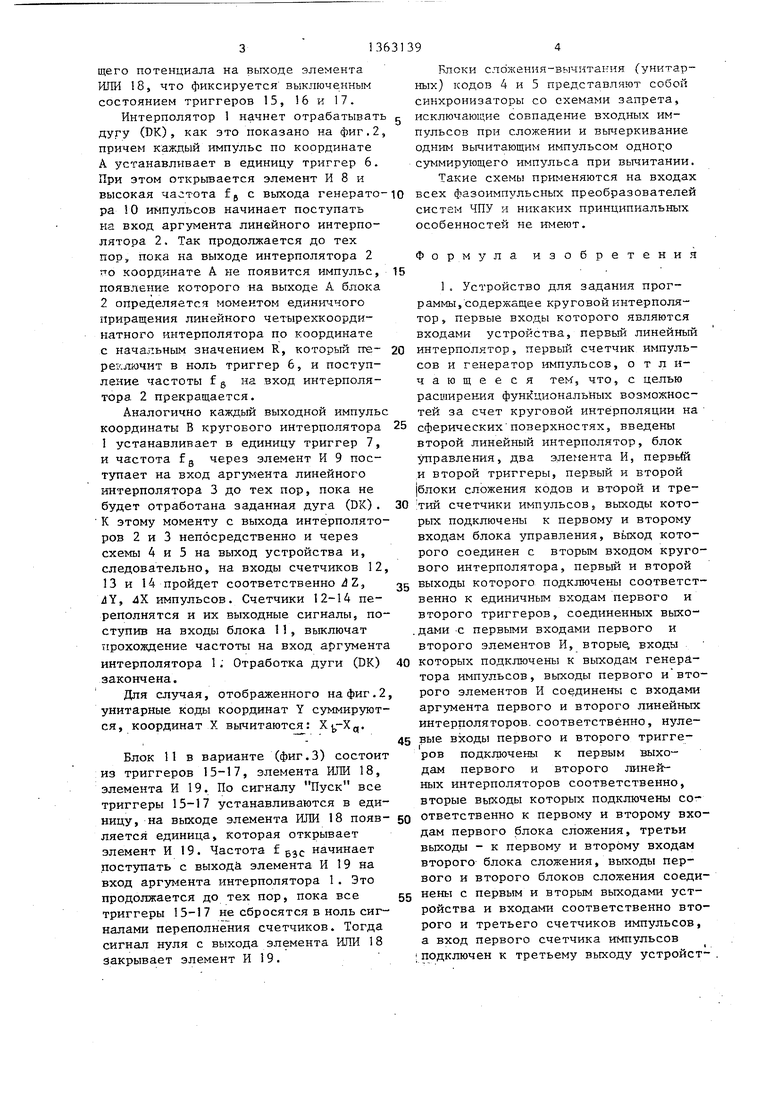
полятор 1, в ведущую координату линейного интерполятора 2 заносится величина R (радиус сферы), а в остальные координаты - проекции точки А, определяемой пересечением оси А со сферой, на оси X, Y, Z; в ведущую координату линейного интерполятора 3 заносится величина R, а в остальные - проекции точки В на оси X и Y.
Как видно из фиг,2, эти проекции определяются по формулам:
Х, RCOS Lf со3/31,
Y, RCOS I/ sin/5;
Z д R sini/ Rcosy. Проекции точки В на оси X,Y определяются формулами:
Хд, Rcoso ;
. Y g R- sine/, причем d + Ь 90° t j+ Ц 90.
В счетчики 12-14 импульсов в дополнительном коде заносятся величины &Z, 4Y, й К, т.е. разности соответствующих координат конечной и начальной точек дуги DK. Триггеры 6 и 7 сброшены в ноль, элементы И 8 и 9 закрыты их выходными сигналами. На вход интерполятора 1 поступает команда G 02 (интерполяция по часовой стрелке) или G 03 (интерполяция против часовой стрелки),Поеле этого на вход-блока II управления поступает сигнал Пуск, который включает отработку дуги (DK) ,
Срабатывание блока 11 управления и запрет поступления fgjc блок 1 вызовет появление сигнала на всех выходах счетчиков 12, 13 и 14 независимо от их последовательности, так как элемент И 19 остается открытым при прохождении хотя бы одного единичного потенциала с выходов триггеров 15, 16 или 17 через элемент ИЛИ 18,
При этом на выходе блока 11 появляется частота f gjc с выхода блока задания скорости (не показан), Эта частота ,по :тупает на вход аргумента кругового интерполятора 1, Момент обработки дуги определяется моментом прекращения подачи частоты fcar B блок
031.
1, т,е, моментом появления запрещающего потенциала на выходе элемента ИЛИ 18, что фиксируется выключенным состоянием триггеров 15, 16 и 17.
Интерполятор 1 начнет отрабатывать дугу (DK), как это показано на фиг.2 причем каждый импульс по координате А устанавливает в единицу триггер 6. При этом открьшается элемент И 8 и высокая частота fj с выхода генератора 10 импульсов начинает поступать ка вход аргумента линейного интерполятора 2. Так продолжается до тех пор, пока на выходе интерполятора 2 по координате А не появится импульс, появление которого на выходе А блока 2 определяется моментом единичного Приращения линейного четырехкоорди- натного интерполятора по координате с начальным значением R, который пв- реьитючнт в ноль триггер 6, и поступление частоты f g на вход интерполятора 2 прекращается.
Аналогично каждый выходной импульс координаты В кругового интерполятора 1 устанавливает в единицу триггер 7, и частота fg через элемент И 9 поступает на вход аргумента линейного интерполятора 3 до тех пор, пока не будет отработана заданная дуга (DK). К этому моменту с выхода интерполяторов 2 и 3 непосредственно и через схемы 4 и 5 на выход устройства и, следовательно, на входы счетчиков 12 13 и 14 пройдет соответственно/) Z, 4Y, 4Х импульсов. Счетчики 12-14 переполнятся и их выходные сигналы, поступив на входы блока 11, выключат прохождение частоты на вход аргумента интерполятора 1; Отработка дуги (DK) закончена.
Для случая, отображенного на фиг.2 унитарные коды координат Y суммируются, координат X вычитаются: Ху-Х.
Блок 11 в варианте (фиг.З) состоит из триггеров 15-17, элемента ИЛИ 18, элемента И 19. По сигналу Пуск все триггеры 15-17 устанавливаются в единицу, на выходе элемента ШШ 18 появ- ляется единица, которая открывает элемент И 19. Частота f БЗС начинает поступать с выхода элемента И 19 на вход аргумента интерполятора 1. Это продолжается до тех пор, пока все триггеры 15-17 не сбросятся в ноль сигналами переполнения счетчиков. Тогда сигнал нуля с выхода элемента ИЛИ 18 Закрывает элемент И 19.
Блоки слол ения-вычитания (унитарных) кодов 4 и 5 представляют собой синхронизаторы со схемами запрета, исключающие совпадение входных импульсов при сложении и вычеркивание однш вычитающим импульсом одного суммирующего импульса при вычитании.
Такие схемы прш-шняются на входах всех фазоимпульсных преобразователей систем ЧПУ и никаких принципиальных особенностей не имеют.
Формула изобретения
1 Устройство для задания программы, содержащее круговой интерполятор , первые входы которого являются входами устройства, первый линейный интерполятор, первый счетчик импульсов и генератор импульсов, о т л и- чающееся T&i-i, что, с целью расширения фун1 циональных возможностей за счет круговой интерполяции на сферических поверхностях, введены второй линейный интерполятор, блок управления, два элемента И, первь(й и второй триггеры, первый и второй блоки сложения кодов и второй и тре- :тий счетчики импульсов выходы которых подключены к первому и второму входам блока управления, вькод которого соединен с вторым входом кругового интерполятора, первьй и второй выходы которого подключены соответственно к единичным входам первого и второго триггеров, соединенных выходами -с первыми входами первого и второго элементов И, вторы входы которых подключены к выходам генератора импульсов, выходы первого и второго элементов И соединены с входами аргумента первого и второго линейных интерполяторов, соответственно, нулевые входы первого и второго тригге- I
ров подключены к первым выходам первого и второго линей- ных интерполяторов соответственно, вторые выходы которых подключены соответственно к первому и второму входам первого блока сложения, третьи выходы - к первому и второму входам второго блока сложения, выходы первого и второго блоков сложения соединены с первым и вторым выходами устройства и входами соответственно второго и третьего счетчиков импульсов, а вход первого счетчика импульсов ;подключен к третьему выходу устройства и четвертому выходу второго линейного интерполятора, входами которого являются вторые бходы устройства для задания программы, третьи входы которого соединены с входами первого линейного интерполятора,,а входы Пуск
и Задания
соответственно с четвертым и пятым входами блока управления .
2. Устройство по п.1, о т л и ч а- го щ е е с я тем, что блок управления
содержит три триггера, элемент ИЛИ и .элемент И, выход которого соединен с выходом блока управления, четвертый вход которого соединен с первым входом элемента И, подключенного вторым входом к выходу элемента ИЛИ, входы которого соединены с соответствующими выходами триггеров, подключенных первыми входами к первому, второму и третьему входам блока управления соответственно, а вторыми входами - к пятому входу блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания программы | 1986 |
|
SU1312529A1 |
| Устройство для задания программы | 1986 |
|
SU1327062A1 |
| Устройство для задания программы | 1986 |
|
SU1348773A1 |
| Устройство для программного управления | 1986 |
|
SU1406568A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Система для программного управления | 1985 |
|
SU1325410A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для программного управления | 1986 |
|
SU1317399A1 |
| Устройство для измерения угла в системах числового программного управления | 1987 |
|
SU1495749A1 |
Изобретение относится к автоматике и вычислительной технике.и может быть использовано в системах числового программного зшравления станками. Цель изобретения - расширение функциональных возможностей за счет круговой интерполяции на сферических поверхностях. Устройство для задания программы содержит круговой интерполятор 1, два линейных интерполятора 2 и 3, генератор импульсов 10,.триггеры 6,7, зле- менты И 8, 9, два блока 4 и 5 сложения кодов, счетчики 12-14 импульсов и блок управления 11. С помощью данного .устройства решается задача интерполяции кривых на сфере с.произвольным соотношением поворота осей. Это достигается тем, что включаются два линейных интерполятора по отношению к координатам кругового интерполятора, причем каждая линия иа сфере задается одним кадром программы. 1 з.п.ф-лы, 3 ил. с $ оо О5 СО оо cs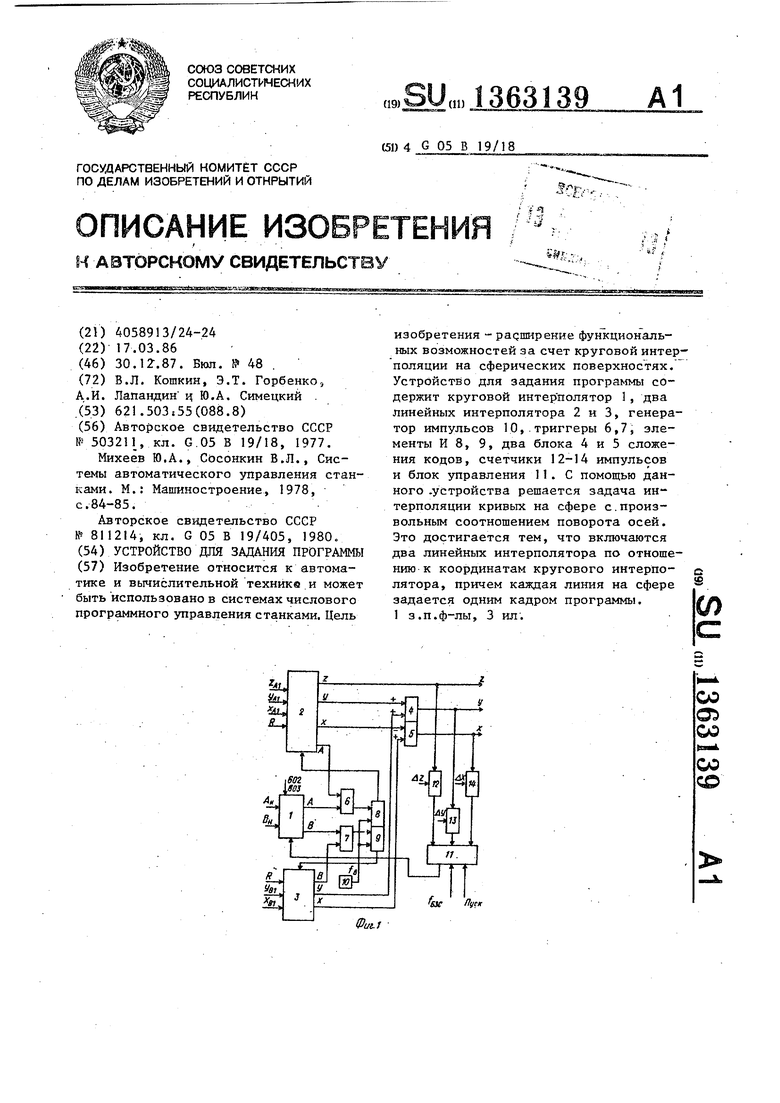
-Г
в
Фиг. 2
фиг.З
| Система программного управления станками | 1973 |
|
SU503211A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Михеев Ю.А., Сосонкин В.Л., Системы автоматического управления станками | |||
| М.: Машиностроение, 1978, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| Программное задающее устройство | 1979 |
|
SU811214A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
