Изобретение относится к области автоматики и вычислительной техники и может найти применение в системах подготовки программ для станков с ЧПУ и роботов.
Целью изобретения является сокращение объема программ.
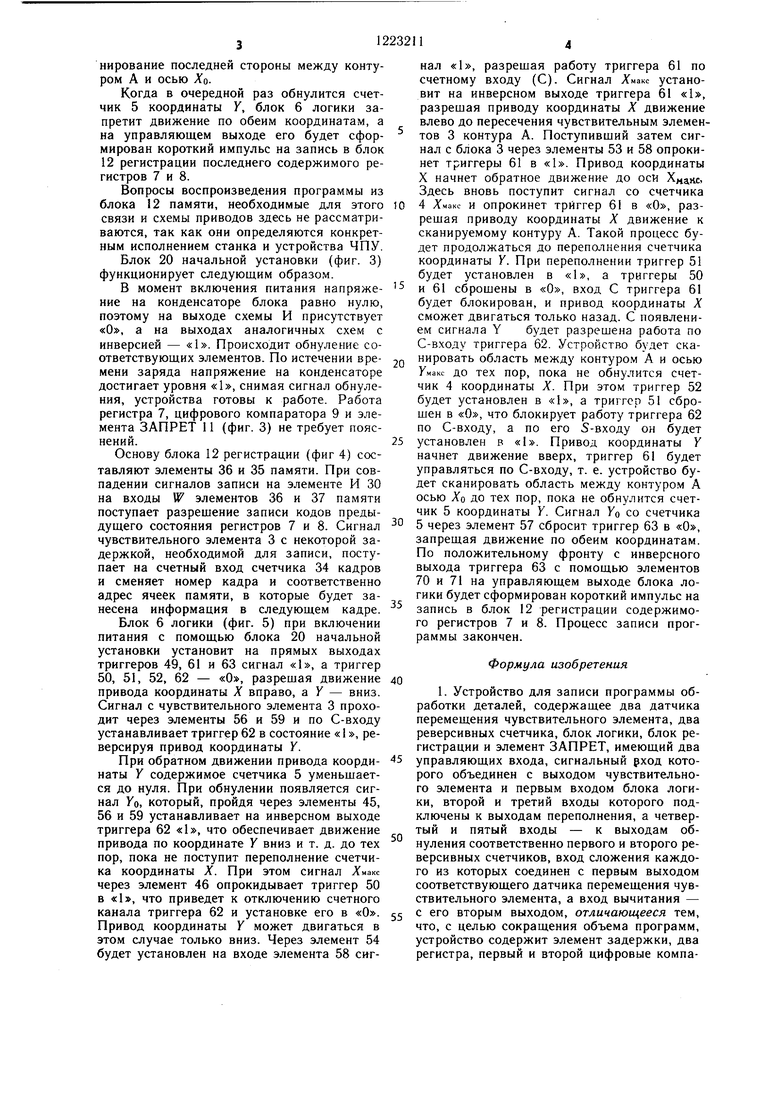
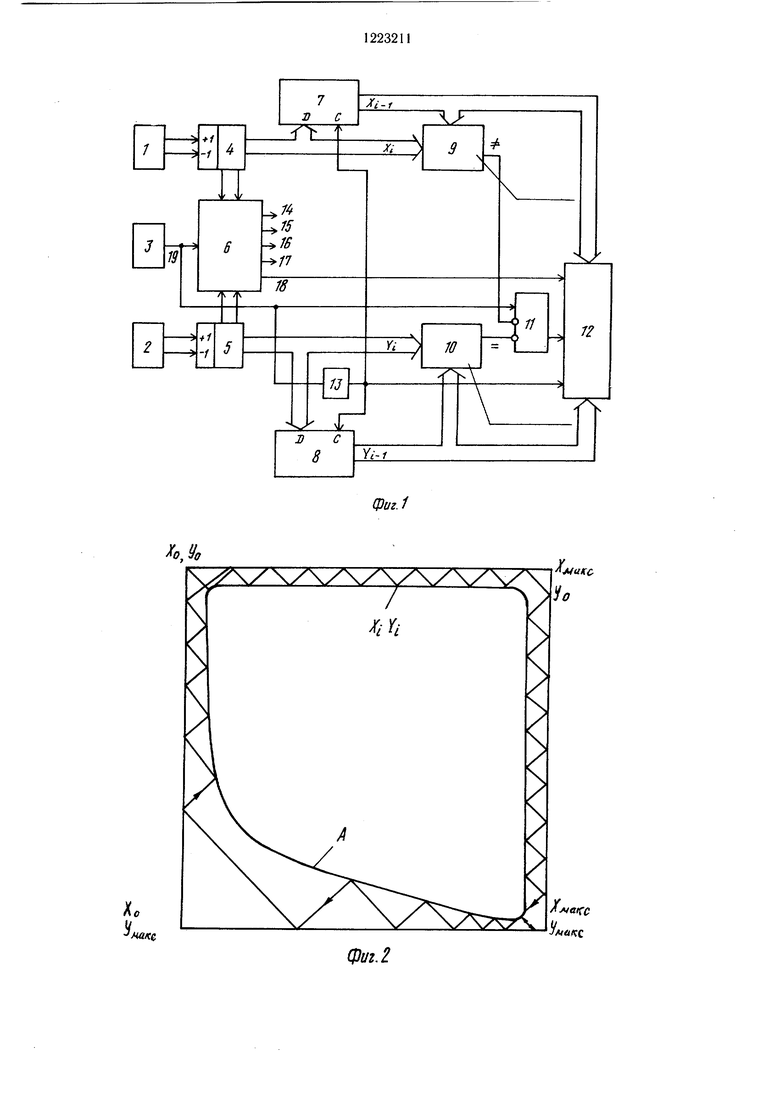
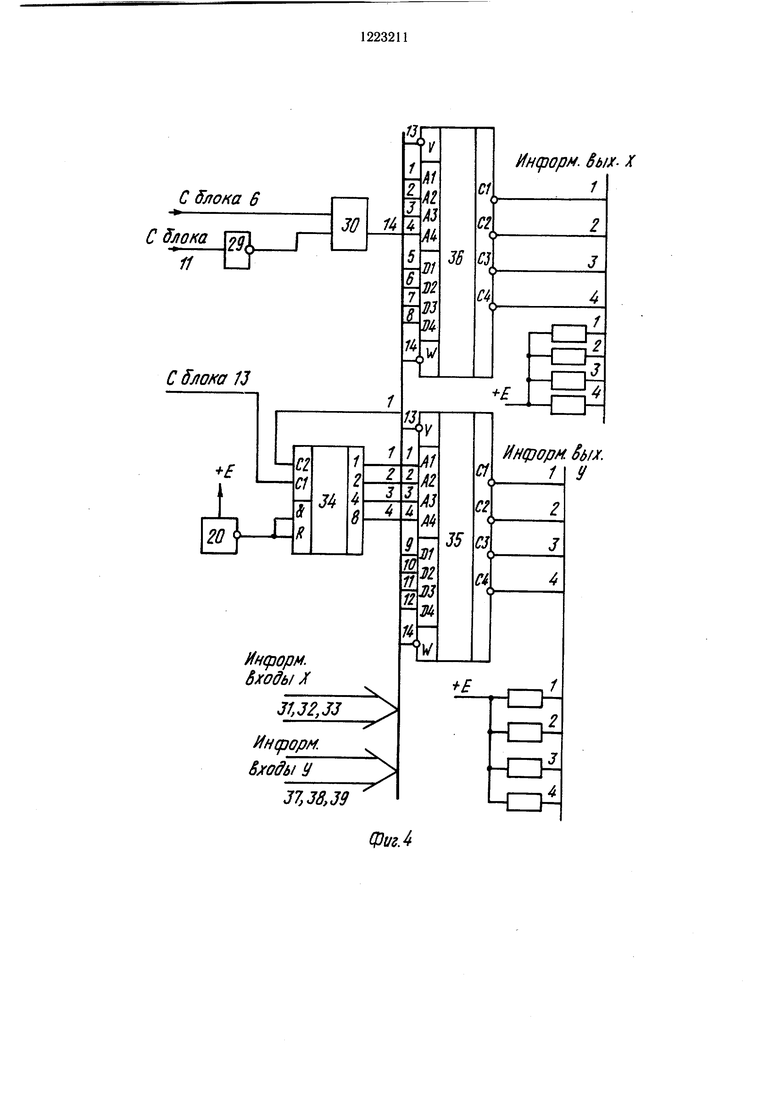
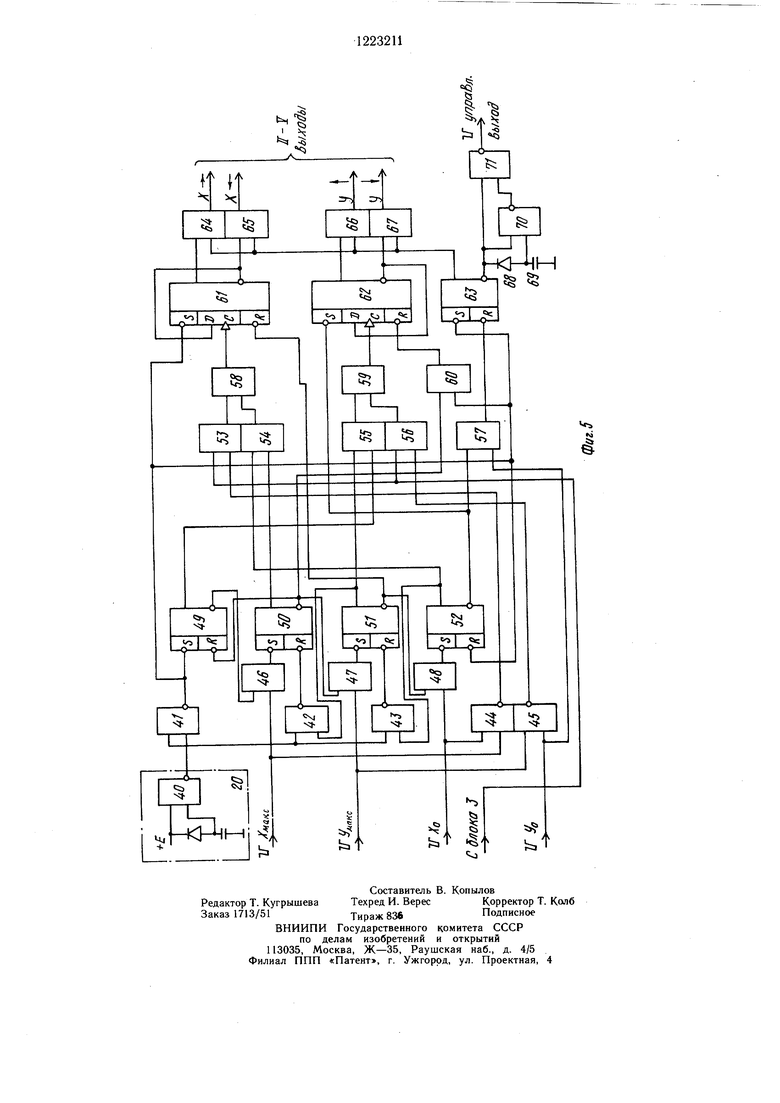
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - диаграмма работы устройства (А - записываемый контур, Хо, YO - начальное состояние счетчиков 4 и 5, Аймаке, Умакс - состояние этих счетчиков при переполнении); на фиг. 3 - принципиальная схема счетчика, регистра, цифрового компаратора и схемы И; на фиг. 4 - принципиальная схема блока регистрации; на фиг. 5 - принципиальная схема блока логики.
Устройство для записи программы обработки деталей содержит два датчи а 1 и 2 перемещения чувствительного элемента 3, два реверсивных счетчика 4 и 5, блок 6 логики, два регистра 7 и 8, два цифро- вых компаратора 9 и 10, элемент ЗАПРЕТ 11, блок 12 регистрации и элемент 13 задержки, выходы 14-18 блока 6 логики, выход 19 элемента 3, блоки 20 начальной установки на базе диода, конденсатора и элемента И или И-НЕ, счётчик 21, сопротивление 22, элемент И 23, дешифратор 24, элементы ИЛИ 25 и 26, элемент И-НЕ 27, элемент ИЛИ- НЕ 28.
Блок 12 регистрации (фиг. 4) содержит элемент ИЛИ-НЕ 29, элемент И 30, информационные входы X 31-33, счетчик 34, элементы 35 и 36 памяти, информационные входы У 37-39.
Блок 6 логики (фиг. 5) содержит элемент И-НЕ 40, элементы ИЛИ-НЕ 41-43, элементы И-НЕ 44 и 45, элементы ИЛИ 46-48, RS-триггеры 49-52, элементы ИЛИ 53-57, элементы И 58-60, / S-триггеры 61 и 62, 5-триггер 63, элементы И 64-67, вентиль 68, конденсатор 69, элементы И-НЕ 70 и 71.
Устройство работает следующим образом.
Для записи произвольного контура А (на фиг. 2) оператор задает цену импульса по каждой координате X, У, исходя из объема счетчиков 4 и 5 таким образом, чтобы их переполнение (А макс, Умакс) происходило вне контура А, и вручную переводит рабочие органы координат в исходную позицию (Хо, УО), после чего на установку подается питание. При включении питания обнуляются счетчики и регистры устройства, очищается блок 12 регистрации, готовясь к записи нулевого кадра, на управляющем выходе блока 6 логики устанавливается сигнал «1, а на остальных выходах - сигналы xY-вправо, У-вниз. Оператор запускает программу управления рабочими органами (не показано), и они, двигаясь в положи- тельноМ направлении (X вправо, У вниз), посылают импульсы с соответствующих им датчиков 1 и 2 на входы сложения соот
0
0 5
0
5 5
0
ветствующих им счетчиков 4 и 5 и перемещают при этом чувствительный элемент 3, который каждый раз в момент пересечения его с контуром А выдает сигнал на элемент ЗАПРЕТ 11, на первый вход блока 6 логики и на вход элемента 13 задержки записи регистров 7 и 8.
Получив сигнал с чувствительного элемента 3, блок 6 логики выдает команду на реверс координаты У (вместо сигнала У (вниз) появляется на его выходе сигнал У (вверх). В этот же момент коды текущего состояния счетчиков 4 и 5 сравниваются с кодами прерыдущего состояния соответствующих им регистров 7 и 8 и в случае их неравенства на выходе элемента ЗАПРЕТ 11 формируется сигнал разрешения записи в блок 12 регистрации. Второй сигнал разрешения записи в блок 12 приходит на другой вход этого блока с управляющего выхода блока 6 логики.
При совпадении обоих сигналов разрешения записи в блок 12 регистрации поступает информация с регистров 7 и 8. По окончании записи информации о предыдущем состоянии координат сигнал разрешения записи снимается с второго управляющего входа блока 12, он увеличивает на единицу адрес и переходит в состояние ожидания разрешения на запись информации следующего кадра. В регистры 7 и 8 заносятся теперь коды текущего состояния счетчиков 4 и 5 по команде записи с элемента 13 задержки.
После реверса координата У движется вверх, посылая импульсы с соответствующего ей датчика 9 на вход вычитания счетчика 5. В момент обнулевания счетчика 5 сигнал обнуления УО поступает на пятый вход блока 6 логики, вызывая переключение на его выходах сигнала У вверх на сигнал У вниз.
В момент следующего пересечения контура А чувствительным элементом 3 описанная последовательность операций повторяется. В таком порядке элемент 3 сканирует область между контуром А и осью УО до тех пор, пока не переполнится первый счетчик 4. При этом, если в момент формирования импульса с блока 3 коды текущего и предыдущего состояний счетчика хотя бы одной из координат окажутся равными ( на фиг. 1), запись информации в блок регистрации не производится.
По сигналу его переполнения блок 6 логики формирует команду на реверс координаты X. Теперь в режиме возвратно-поступательного движения между кривой А и прямо .макс начинает работать привод координаты X, тогда как по координате осуществляется равномерное движение вниз. С момента переполнения счетчика 5 в сканирующий режим вновь переводится рабочий орган коордиийты У, а рабочий орган координаты .X движется влево. Наконец, по сигналу обнуления счетчика 4 начинается сканирование последней стороны между контуром А и осью Хо.
Когда в очередной раз обнулится счетчик 5 координаты У, блок 6 логики запретит движение по обеим координатам, а на управляющем выходе его будет сфор- мирован короткий импульс на запись в блок 12 регистрации последнего содержимого регистров 7 и 8.
Вопросы воспроизведения программы из блока 12 памяти, необходимые для этого связи и схемы приводов здесь не рассматриваются, так как они определяются конкретным исполнением стайка и устройства ЧПУ.
Блок 20 начальной установки (фиг. 3) функционирует следующим образом.
В момент включения питания напряже- ние на конденсаторе блока равно нулю, поэтому на выходе схемы И присутствует «О, а на выходах аналогичных схем с инверсией - «1. Происходит обнуление соответствующих элементов. По истечении вре- мени заряда напряжение на конденсаторе достигает уровня «1, снимая сигнал обнуления, устройства готовы к работе. Работа регистра 7, цифрового компаратора 9 и элемента ЗАПРЕТ 11 (фиг. 3) не требует пояснений.
Основу блока 12 регистрации (фиг 4) составляют элементы 36 и 35 памяти. При совпадении сигналов записи на элементе И 30 на входы W элементов 36 и 37 памяти поступает разрешение записи кодов предыдущего состояния регистров 7 и 8. Сигнал чувствительного элемента 3 с некоторой задержкой, необходимой для записи, поступает на счетный вход счетчика 34 кадров и сменяет номер кадра и соответственно адрес ячеек памяти, в которые будет занесена информация в следующем кадре.
Блок 6 логики (фиг. 5) при включении питания с помощью блока 20 начальной установки установит на прямых выходах триггеров 49, 61 и 63 сигнал «1, а триггер 50, 51, 52, 62 - «О, разрешая движение привода координаты X вправо, а У - вниз. Сигнал с чувствительного элемента 3 проходит через элементы 56 и 59 и по С-входу устанавливает триггер 62 в состояние «1, реверсируя привод координаты У.
При обратном движении привода коорди- наты У содержимое счетчика 5 уменьшается до нуля. При обнулении появляется сигнал УО, который, пройдя через элементы 45, 56 и 59 устанавливает на инверсном выходе триггера 62 «1, что обеспечивает движение привода по координате У вниз и т. д. до тех пор, пока не поступит переполнение счетчика координаты X. При этом сигнал Аймаке
через элемент 46 опрокидывает триггер 50 в «1, что приведет к отключению счетного канала триггера 62 и установке его в «О. Привод координаты У может двигаться в этом случае только вниз. Через элемент 54 будет установлен на входе элемента 58 сигнал «1, разрешая работу триггера 61 по счетному входу (С). Сигнал Хмакс установит на инверсном выходе триггера 61 «1, разрешая приводу координаты А движение влево до пересечения чувствительным элементов 3 контура А. Поступивший затем сигнал с блока 3 через элементы 53 и 58 опрокинет триггеры 61 в «1. Привод координаты X начнет обратное движение до оси Х,4акс, Здесь вновь поступит сигнал со счетчика
4Хчакс и опрокинет триггер 61 в «О, разрешая приводу координаты X движение к сканируемому контуру А. Такой процесс будет продолжаться до переполнения счетчика координаты У. При переполнении триггер 51 будет установлен в «1, а триггеры 50 и 61 сброшены в «О, вход С триггера 61 будет блокирован, и привод координаты X сможет двигаться только назад. С появлением сигнала Y будет разрешена работа по С-входу триггера 62. Устройство будет сканировать область между контуром А и осью Умакс до тех пор, пока не обнулится счетчик 4 координаты X. При этом триггер 52 будет установлен в «1, а триггер 51 сброшен в «О, что блокирует работу триггера 62 по С-входу, а по его S-входу он будет установлен в «1. Привод координаты У начнет движение вверх, триггер 61 будет управляться по С-входу, т. е. устройство будет сканировать область между контуром А осью Хо до тех пор, пока не обнулится счетчик 5 координаты У. Сигнал УО со счетчика
5через элемент 57 сбросит триггер 63 в «О, запрещая движение по обеим координатам. По положительному фронту с инверсного выхода триггера 63 с помощью элементов 70 и 71 на управляющем выходе блока логики будет сформирован короткий импульс на запись в блок 12 регистрации содержимого регистров 7 и 8. Процесс записи программы закончен.
Формула изобретения
1. Устройство для записи программы обработки деталей, содержащее два датчика перемещения чувствительного элемента, два реверсивных счетчика, блок логики, блок регистрации и элемент ЗАПРЕТ, имеющий два управляющих входа, сигнальный рход которого объединен с выходом чувствительного элемента и первым входом блока логики, второй и третий входы которого подключены к выходам переполнения, а четвертый и пятый входы - к выходам обнуления соответственно первого и второго реверсивных счетчиков, вход сложения каждого из которых соединен с первым выходом соответствующего датчика перемещения чувствительного элемента, а вход вычитания - с его вторым выходом, отличающееся тем, что, с целью сокращения объема программ, устройство содержит элемент задержки, два регистра, первый и второй цифровые компараторы, первые информационные входы каждого из которых объединены с выходами одноименного реверсивного счетчика и информационными входами одноименного регистра, а вторые информационные входы - с выхо- дами одноименного регистра и одноименными информационными входами блока регистрации, первый вход записи которого подключен к управляющему выходу блока логики, второй вход записи - к выходу элемента ЗАПРЕТ, а третий вход объединен с входами записи регистров и выходом элемента задержки, вход которого соединен с выходом чувствительного элемента, выходы первого и второго цифровых компараторов подключены соответственно к первому и второму управляющим входам элемента ЗАПРЕТ, второй, третий, четвертый и пятый выходы блока логики подключены к исполнительным механизмам.
2. Устройство по п. 1, отличающееся тем, что блок логики содержит три элемента ИЛИ-НЕ, четыре элемента И-НЕ, восемь элементов ИЛИ, пять / 5-триггеров с инверсными R- и S-входами, семь элементов И, два DRS-триггера и с инверсными R- и S- входами, конденсатор и вентиль, катод кото- рого соединен с инверсным выходом пятого / 5-триггера и с первыми входами третьего и четвертого элементов И-НЕ, а анод - с конденсатором, другой вывод которого заземлен, и с вторым входом третьего элемента И-НЕ, выход которого соединен с вто- рым входом четвертого элемента И-НЕ, выход которого является управляющим выходом блока, первый и второй выходы первого элемента ИЛИ-НЕ, являющиеся входами для начальной установки в «О блока, соединены между собой и с первыми входами второго и третьего элементов ИЛИ-НЕ, вторые входы которых соединены с прямыми выходами третьего и четвертого 5-тригге- ров соответственно, S-входы которых соединены с выходами второго и третьего элемен- тов ИЛИ соответственно, вторые входы которых соединены соответственно с первыми входами первого и второго элементов И-НЕ, являющимися третьим и четвертым входами блока, а первые входы которых соединены с инверсными выходами второго и тре- тьего RS-триггеров соответственно, R-входы которых соединены соответственно с выходами второго и третьего элементов ИЛИ-НЕ, а прямые выходы соответственно - с первыми входами пятого и шестого элементов ИЛИ, вторые входы которых соединены с прямыми выходами четвертого и первого / 5-триггеров соответственно, -входы которых соединены с выходом первого элемента ИЛИ-НЕ и с инверсным выходом второго / 5-триггера соответственно, а инверсные выходы - с первыми входами восьмого и первого элементов ИЛИ соответственно, вторые входы которых соответственно соединены с вторыми входами второго и первого элементов И-НЕ и являются пятым и вторым входами блока, а выходы - с / -входом пятого / 5-триггера и с 5-вхо- дом второго / 5-триггера соответственно, S-вход и инверсный выход которых соответственно подключены к первому и второму входам третьего элемента И, выход которого соединен с / -входом второго О/ 5-тригге- ра, прямой и инверсный выходы которого соединены с первыми входами щестого и седьмого элементов И соответственно, вторые входы которых соединены с вторыми входами четвертого и пятого элементов И, с прямым выходом пятого / 5-триггера и между собой, а выходы являются соответственно четвертым и пятым выходами блока,5-вход первого ОУ 5-триггера соединен с выходом первого элемента ИЛИ-НЕ и S- входами первого и пятого / 5-триггеров, инверсные выходы третьего и четвертого RS- триггеров соединены с 7 -входом первого DRS-триггера и S-входом второго DRS-триггера соответственно, D-входы которых соединены соответственно с инверсными выходами одноименных триггеров, а С-входы - с выходами первого и второго элементов И соответственно, первые входы которых соединены с пятым и шестым элементами ИЛИ соответственно, а вторые входы - с четвертым и седьмым элементами ИЛИ соответственно, первые входы которых соответственно соединены с выходами первого и второго элементов И-НЕ, а вторые входы соединены между собой и являются первым входом блока, прямой и инверсный выходы первого О/ 5-триггера соединены с первыми входами четвертого и пятого элементов И соответственно, выходы которых являются соответственно вторым и третьим выходами блока.
oJc
маке,
макс.
aifc
ЛЙАСС
фиг. 2
л
II It
«э
5i. ., TC «4 «4: OQ
N
st
CM
r-O-T-O-i
hf 5
I l
I
/V
I
«) A
t- x
- «M «So
2y t
evj
H
I
Фиъ4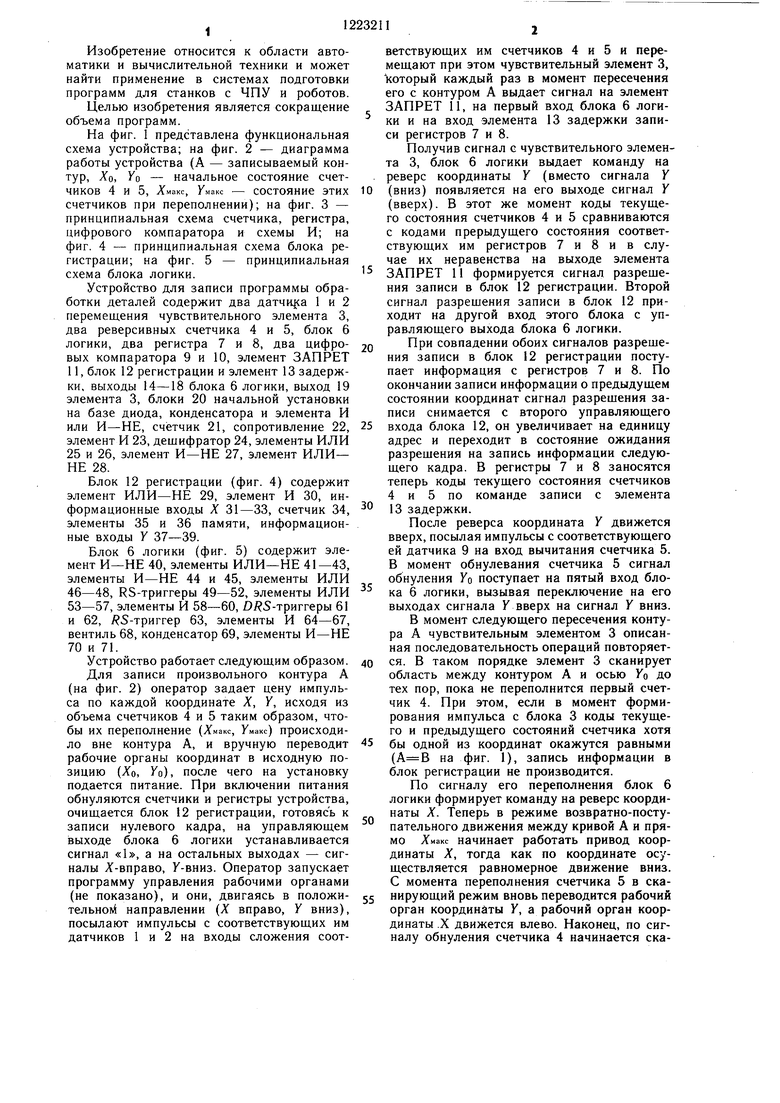
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ввода информации | 1990 |
|
SU1698890A1 |
| Устройство для ввода информации | 1990 |
|
SU1702382A1 |
| Цифровой линейный интерполятор | 1990 |
|
SU1805449A1 |
| Автоматизированная система тестового контроля | 1985 |
|
SU1278857A1 |
| Преобразователь кода | 1989 |
|
SU1619401A1 |
| Устройство для моделирования систем массового обслуживания | 1988 |
|
SU1532943A1 |
| Аппроксимирующий функциональный преобразователь | 1984 |
|
SU1205153A1 |
| Устройство для ввода информации | 1990 |
|
SU1783509A2 |
| Устройство для обработки сообщений | 1990 |
|
SU1803919A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1550549A1 |
Изобретение может быть использовано в системах пороговых программ для станков с числовым программным управлением и роботов и позволяет сократить объем программ благодаря организации автоматического выделения и записи опорных точек контура. Для записи произвольного контура А оператор задает цену импульса по нижней координате А, У и вручную переводит рабочие органы в исходную позицию (Хо, YO). Рабочие органы, двигаясь в заданном направлении, посылают импульсы с датчиков на входы сложения соответствующих им счетчиков и перемещают при этом чувствительный элемент, который каждый раз в момент пересечения его с контуром А выдает сигнал на элемент ЗАПРЕТ, в блок логики и на элемент задержки записи регистров. В цифровых компараторах в случае неравенства кодов текущих состояний счетчиков и кодов предыдущего состояния соответствующих регистров формируется сигнал разрешения записи в блок регистрации информации из регистров. При соот- g ветствующем обнулении счетчика координа- ты Y блок логики автоматически запрещает Л движение по обеим координатам. 1 з.п. ф-лы, 5 ил. to ю 00 ND
| Детектор амплитудно-модулированных сигналов | 1988 |
|
SU1552347A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для записи программы обработки деталей | 1980 |
|
SU951241A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
