1
Изобретение относится к электроаппаратостроению и может быть использовано в низковольтных коммутационных аппаратах с контактами мостикового типа.
По основному авт. св. № 879668 известна контактная система мостикового типа, содержащая неподвижные контакты, траверсу и установленные на ней контактную пружину и цилиндрический контактный мостик, характеризующаяся тем, что снабжена храповым колесом и поворачивающей и удерживающей собачками, траверса снабжена неподвижным и подвижным изоляторами, причем храповое колесо установлено на контактном мостике, поворачивающаяся собачка закреп 1ена на неподвижном изоляторе, а удерживающая собачка закреплена на подвижном изоляторе, при этом контактный мостик снабжен контактными напайками, выполненными в виде косо отсеченных частей полого круглого цилиндра, установленных соосно с осью вращения контактного мостикаПЗ.
Недостатком этого устройства является низкая долговечность, обусловленная тем, что износ неподвижных контактов происходит по линии, а не по всей поверхности
неподвижных контактов, а кроме того, в результате износа подвижных и неподвижных контактов уменьшается провал контактов и конечное контактное нажатие, что приводит к ухудшению качественных пока5 зателей контактного устройства.
Цель изобретения - повышение долговечности контактной системы.
Поставленная цель достигается тем, что упомянутая контактная система снабжена
,0 упором с дополнительной поворачивающей собачкой, дополнительной удерживающей собачкой, дополнительным храповым колесом, рабочая поверхность которого частично выполнена с зубьями, двумя дополнительными кронштейнами, неподвижные контакты выполнены в виде кулачков, закрепленных на одном изоляционном валу, концы которого закреплены в отверстиях дополнительных кронштейнов, и имеют гибкие токоподводы, причем дополнительное храповое
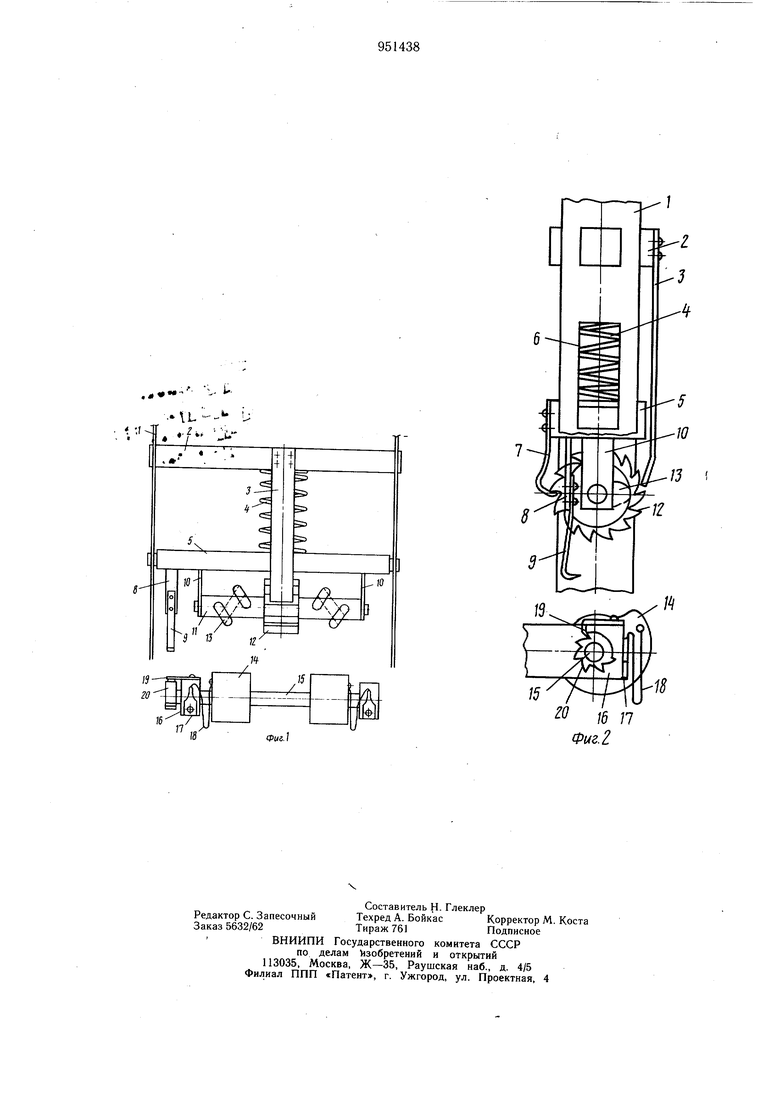
2Q колесо закреплено на упомянутом изоляционном валу и сцеплено с дополнительной удерживающей собачкой, закрепленной на одном из дополнительных кронщтейнов, а упор с дополнительной поворачивающейся собачкой закреплен на подвижном изоляторе с возможностью взаимодействия с дополнительным храповым колесом. На фиг. показана контактная система, вид спереди; на фиг. 2 - то же, вид сбоку. Контактная система содержит траверсу , на которой закреплены неподвижныйизолятор 2 с поворачивающей собачкой 3, контактная пружина 4, надетая одним своим концом на выступ изолятора 2, а другим - на выступ подвижного изолятора 5, который расположен в продольных пазах 6 траверсы 1 и с которым жестко соединены удерживаюндая пружинящая собачка 7, упор 8 с дополнительной пoвopaчивaюнJ,eй собачкой 9, кронштейны 10, в отверстия которых вставлена ось цилиндрического контактного мостика 11 с храповым колесом 12 и контактными напайками 13, которые могут быть выполнены либо в виде цилиндрических винтовых спиралей, либо в вИлТ,е косо отсеченных частей полого кругового цииндра, установленных соосно с осью вращения контактного мостика. Неподвижные контакты, выполненные в виде кулачков 14, укреплены на общем изоляционном валу 15, вставленном в отверстия поддерживающих его дополнительных кронштейнов 16. На кронштейнах 16 имеются клеммы 17, соединенные с кулачками 14 гибкими токоподводами 18, а на одном из кронштейнов 16 закреплена дополнительная удерживающая собачка 19, находящаяся в зацеплении с дополнительным храповы.м колесом 20, рабочая .поверхность которого частично выполнена с зубьями. Кулачки 14 находятся под контактными напайками 13 мостика 11, а зубья храпового колеса 20 - под поворачивающей собачкой 9. Крепление собачки 9 к устуну 8 допускает (в процессе регулировки контактной системы) осевое перемещение в небольших пределах собачки 9 относительно упора 8. В исходном состоянии {контакты разомкнуты и не изношены) цилиндрический контактный мостик 11 удерживается в одном из фиксированных положений собачкой 7 за счет взаимодействия ее с храповым колесом 12. При этом поворачивающая собачка 3 своим свободным концом не давит на зуб храпового колеса 12. Кулачки 14 удерживаются благод,аря взаимодействию храпового колеса 20 с пружинящей собачкой 19 в таком фиксированном положении, при котором обращены к напайкам 13 контактного мостика участком с наименьшим радиусом. При замыкании контактов совместно с траверсой 1, изолятором 2 и поворачивающей собачкой 3 движутся изолятор 5, упор 8 с собачкой 9 и контактный мостик 11 до соприкосновения его контактных напаек 13 с кулачками 14. После соприкосновения контактов траверса 1, изолятор 2 и поворачивающая собачка 3 продолжают движение вниз, сжимая контактную пружину 4, до выбора провала контактов. При этом поворачивающая собачка 3 упирается в зуб храпового колеса 12и поворачивает его в месте с контактным мостико.м 11 вокруг оси, вставленной в отверстия кронштейнов 10, на некоторый угол. Поворот мостика 11 сопровождается скольжением контактных напаек 13 по обращенным в их сторону участкам поверхностей кулачков 14 и перемещением по ним зон контактирования вдоль оси мостика 11, причем.в случае выполнения контактных напаек спиральными, на одинаковое расстояние при каждом срабатывани и. При размыкании контактов сначала траверса 1, изолятор 2 и поворачивающая собачка 3, а затем, после выбора провала контактов, изолятор 5 с упором 8, собачкой 9 и цилиндрический контактный мостик свободно движутся вверх. Причем положение контактных напаек 13 мостика 11 остается тaким же, как и в предшествующем замкнутом состоянии за счет взаимодействия удерживающей пружинящей собачки 7 с храповым колесом 12. Это положение контактных напаек 13 сохраняется до следующего замыкания контактов, при которо.м все описанное для процесса замыкания повторяется. До тех пор, пока суммарный износ контактов (на поверхности кулачков 14 по линии, обращенной к оси контактного мостика 11, и параллельно ей, а на подвижных контактах по внешней стороне контактных напаек 13) не превышает допустимой величины, при замыкании контактов поворачивающая собачка 9 не доходит своим зубом до храпового колеса 20. После того, как износ контактов достигает некоторой заранее заданной величины. при замыкании контактов подвижный изолятор 5 приближается к валу 15 неподвижных контактов настолько, что поворачивающая собачка 9 входит в зацепление с храповым колесом 20. При размыкании контактов со бачка 9 увлекает за собой зуб храпового колеса 20, поворачивая его вместе с валом 15 и кулачками 14 на некоторый угол. В результате этого кулачки 14 поворачиваются в сторону контактного мостика 11 неизношенным участком своей поверхности, имеющим больший радиус, чем участок, работавший в предшествующем положении, и фиксируются в этом положении удерживающей собачкой 19. Увеличение радиуса неподвижных контактов компенсирует износ контактных напаек 13. Таким образом, после смены положения кулачков 14 обновляется контактная поверхность неподвижных контактов, восстанавливается первоначальное усилие контактного нажатия, а для замкнутого положения контактов восстанавливается нервоначальное расстояние между подвижным изолятором 5 и валом 15 кулачков 14, при котором собачка 9 уже не входит в зацепление с храповым колесом 20. В этом новом положении неподвижные контакты остаются до тех пор, пока, в результате многочисленных срабатываний контактной системы, износ контактируюпдих поверхностей внс1вь приведет к сближению (при замкнутых контактах) подвижного изолятора 5 с валом 15 кулачков 14, в результате чего собачка 9 войдет в зацепление с храповым колесом 20 и повернет во время размыкания контактов его и кулачки 14. Таким образом производится очередной «автоматический ремонт контактной системы. Предлагаемая смена участков контактирования на поверхности неподвижных контактов повторяется до тех пор, пока храповое колесо 20 не будет повернуто собачкой 9 за последний зуб. При этом кулачки 14 поворачиваются к мостику 11 участком с наибольшим радиусом н, следовательно, дальнейшее восстановление контактного нажатия и поверхности неподвижных контактов становится невозможным. В дальнейшем износ контактов протекает так же, как у известных устройств. Благодаря отсутствию части зубьев на храповом колесе 20 становится невозможным его захват собачкой 9 и последующий поворот, даже при наличии причин, ранее приводивших к этому, чем исключается обрыв гибких токоподводов 18 и переход неподвижных контактов в положение, при котором к контактному мостику 11 обращаются уже использованные участки поверхности кулачков 14, имеющие малые радиусы, т. е. исключается поломка контактного устройства. Формула изобретения Контактная система мостикового типа по авт. св. № 879668, отличающаяся тем, что, с целью повыщения долговечности контактной системы, снабжена упором с дополнительной поворачивающей собачкой, дополнительной удерживающей собачкой, дополнительным храповым колесом, рабочая поверхность которого частично выполнена с зубьями, двумя дополнительными кронштейнами, неподвижные контакты выполнены в виде кулачков, закрепленных на одном изоляционном валу, концы которого закреплены в отверстиях дополнительных кронштейнов, и имеют гибкие токоподводы, причем дополнительное храповое колесо закреплено на упомянутом изоляционном валу и сцеплено с дополнительной удерживающей собачкой, закрепленной на одном из дополнительных кронштейнов, а упор с дополнительной поворачивающей собачкой закреплен на подвижном изоляторе с возможностью взаимодействия с допо,1нительным храповым колесом. Источники информации, принятые во .внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2783036/24-07, кл. Н 01 Н 1/20, 1979 (прототип).
,
..VL-
-. /б /7 Фиг. 2.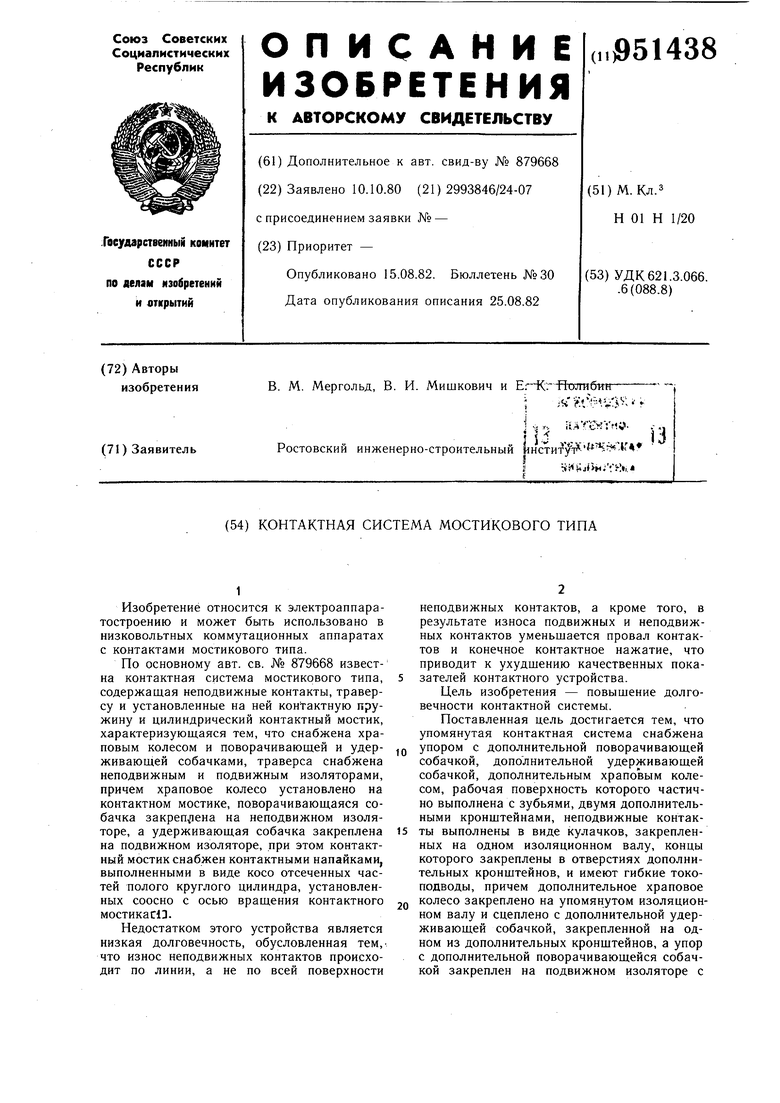
| название | год | авторы | номер документа |
|---|---|---|---|
| Контактная система мостиковогоТипА | 1979 |
|
SU817764A1 |
| Контактная система мостикового типа | 1979 |
|
SU879668A1 |
| Контактная система | 1980 |
|
SU898528A1 |
| Контактная система мостикового типа | 1979 |
|
SU773760A1 |
| Контактная система | 1974 |
|
SU752526A1 |
| Устройство для управления группой исполнительных механизмов | 1986 |
|
SU1345180A1 |
| МНОГОАМПЕРНЫЙ ВЫКЛЮЧАТЕЛЬ | 1993 |
|
RU2077086C1 |
| ВЫКЛЮЧАТЕЛЬ | 2011 |
|
RU2459302C1 |
| КОНТАКТНЫЙ БЛОК | 1973 |
|
SU377901A1 |
| КОНТАКТНОЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКИХ МАШИН | 1973 |
|
SU395948A1 |