(54) ДЕФЕКТООТМЕТЧИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для ультразвукового контроля изделий | 1987 |
|
SU1557515A1 |
| Коммутатор отметчика дефектов | 1972 |
|
SU446823A1 |
| Устройство координатной дефектоотметки | 1981 |
|
SU1004862A1 |
| Устройство координатной дефектоотметки | 1985 |
|
SU1280510A2 |
| Дефектоотметчик | 1983 |
|
SU1096562A1 |
| Устройство координатной дефектоотметки | 1986 |
|
SU1320725A2 |
| Дефектоотметчик | 1972 |
|
SU471532A1 |
| КРАСКООТМЕТЧИ К ДЕФЕКТОВ К ДЕФЕКТОСКОПУ | 1971 |
|
SU319891A1 |
| УСТРОЙСТВО для ОТМЕТКИ ДЕФЕКТА ПРИ КОНТРОЛЕ ПРОКАТА | 1972 |
|
SU349939A1 |
| КРАСКООТМЕТЧИК ДЕФЕКТОВ К ДЕФЕКТОСКОПУ | 1969 |
|
SU255626A1 |

1
Изобретение относится к дефектоскопии и предназначено для отметки дефектов при неразрушающем контроле изделий и сканировании изделия по строке.
Известен дефектоотметчик, содержащий краскораспылитель, емкость, заполненную краской, канал подачи краски, систему подачи сжатого воздуха и электромагнит, управляющий работой краскораспылителя Г Л .
Однако этот дефектоотметмик сложен по конструкции, громоздкий и не может быть использован для отметки при сканировании по строке, так как в этом случае необходимо перемещать его вдоль строки синхронно со сканированием объекта, кроме того, он отличается большой инерционностью и не позволяет производить отметку с высокой скоростью.
Ближайшим по технической сущности к изобретению является дефектоотметчик, содержащий рабочие органы, установленные на рычагах, механизм подведения рабочих органов к месту отметки, выполненный в виде шарнирной тяги, и электромагнит с якорем, предназначенный для управления по сигналу дефектоскопа механизмом подведения. Якорь электромагнита шарнирно соединен с шарнирной тягой 2j.
Известный детектоскоп не позволяет, производить координатную отметку дефектов при сканировании изделия датчиком дефектоскопа, так как требует перемещения вдоль строки синхронно с датчиком дефектоскопа.
Цель изобретения - обеспечение координатной отметки при сканировании изделия датчиком дефектоскопа.
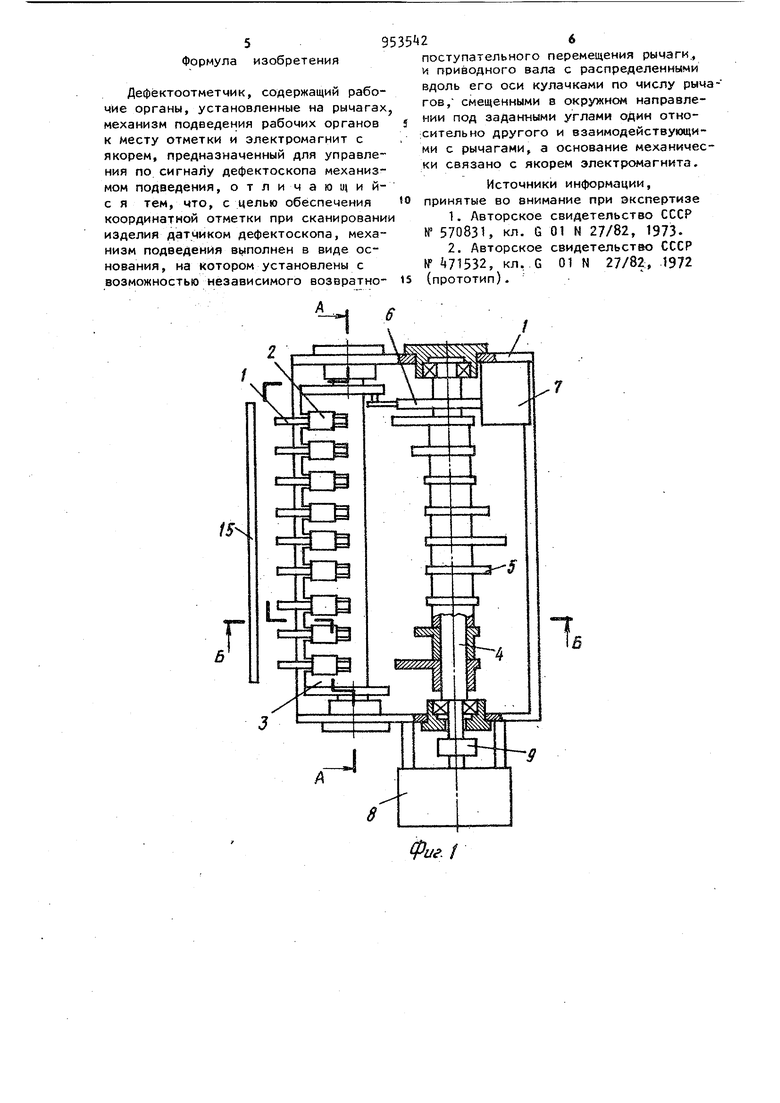
Указанная цель достигается тем, что в датчике, содержащем рабочие органы, установленные на рычагах, механизм подведения рабочих органов к месту отметки и электромагнит с яко3Sрем, предназначенный для управления по сигналу дефектоскопа механизмом подведения, механизм подведения выполнен в виде основания, на котором установлены с возможностью независимого возвратно-поступательного перемещения рычаги, и приводного вала с распределительными вдоль его оси кулачками по числу рычагов, смещенными в окружном направлении под заданными углами от| осительно друг друга и взаимодействующими с рычагами, а основание механически связано с якорем элек тромагнита. На фиг. 1 представлен дефектоотметчик, общий вид; на фиг. 2 - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг. 1. Дефектоотметцик содержит рабочие органы 1, например фломастеры, установленные на рычагах 2. Механизм подведения рабочих органов к месту OTMejT ки, выполненный в виде основания 3, на КО ром установлены с возможиостью независимого аозвратно-поступательного перемещения рычаги 2, и при водной вал с распределенными вдоль его оси кулачками 5 смещенными в окружном направлении под заданными у лами относительно друг друга и взаимодействующими с рычагами 2. Основание 3 механически связано с якорем 6 электромагнита 7. Приводной вал связан с приводом 8 вращения муфтой 9. Основание 3 выполнено в виде угольника и заключено между дву мя щеками 10 и 11 и подпружинено пру жинами 12 с возможностью поворота во руг оси 13. Рычаги 2 выполнены с выс тупами 1. На фиг. 2 приводной вал , кулачки 5, привод 2 вращения, муфта 9, электромагнит и якорь с цел,ью упрощения чертежа не показаны. Дефектоотметчик работает следующим образом. Рычаги 2 (фиг.З) устанавливают вдоль сканируемой строки контролируемого изделия 15 в вертикальной плоскости. Они входят в пазы, выполненные в основании 3 в горизонтальной полке угольника, и с помощью пру жин 12 в исходном положении прижаты вертикальной его полке. Каждый из рычагов 2 установлен в плоскости вра щения соответствующего кулачка 5. Во время работы приводной вал Ц с кулачками 5 вращается от привода 8 вращения. При отсутствии дефекта вра Z дающиеся кулачки 5 не касаются выступов Ц рычагов 2, и отметки не происходит (фиг.З). При обнаружении дефекта появляется электрический сигнал, воздействующий на электромагнит 7- Электромагнит 7 с помощью якоря 6 переводит основание 3 в рабочее.положение путем поворота его относительно оси 13 в направлении против движения часовой стрелки. В этом положении кулачки 5 нажимают на выступы И соответствующих рычагов 2, заставляя рычаги 2 поворачиваться относительно оси 13 в направлении против движения часовой стрелки. Установленные на концах рычагов 2 рабочие органы 1 также поворачиваясь перемещаются в направлении контролируемого изделия 15. Ввиду разности расстояний от оси 13 до выступов 14 рычагов 2 и от оси 13 рабочих органов-1.последние описывают дугу аначйтельно большей длины (т.е. происходит больший путь) и, достигая поверхности изделия 15, производят otMeTKy дефекта о С исчезновением дефекта основание 3 возвращается в исходное положение, и отметка прекращается. Вращение приводного вала k синхронизировано со сканированием изделия по строке. Один оборот соответствует сканированию одной строки. Начало оборота совпадает с началом сканирования строки. В результате этого в момент обнаружения дефекта, когда срабатывает электромагнит 7, один из кулачков 5 нажимает на выступ k рычага 2,.который находится в зоне расположения дефекта. Эта зона соответствует площадке поверхности изделия 15, сигнал от которой попадает на приемное .устройство в данный момент времени. В следующий момент другой (соседний) кулачок 5 нажимает на соответствующего рычага 2, производят тем самым отметку. Отметка по строке продолжается до тех пор, пока дефект обнаруживается. Дефектоотметчик обеспечивает высокую скорость отметки, определяемую временем срабатывания электромагнита 7 временем перевода основания из одного положения а другое, а так как мощность магнита 7 не ограничена, то время срабатывания, учитывая инерционность основания 3, можно довести до 0,05 с.
Формула изобретения
Дефёктоотметчик, содержащий рабочие органы, установленные на рычагах, механизм подведения рабочих органов 5 к месту отметки и электромагнит с якорем, предназначенный для управления по сигналу дефектоскопа механизмом подведения, отличающийс я тем, что, с целью обеспечения О координатной отметки при сканировании изделия датчиком дефектоскопа, механизм подведения выполнен в виде основания, на котором установлены с возможностью независимого возвратно- is
поступательного перемещения рычаги., и приводного вала с распределенными вдоль его оси кулачками по числу рычгов, смещенными в окружном направлении под заданными углами один отно:сительно другого и взаимодействующими с рычагами, а основание механически связано с якорем электромагнита.
Источники информации, принятые во внимание при экспертизе
