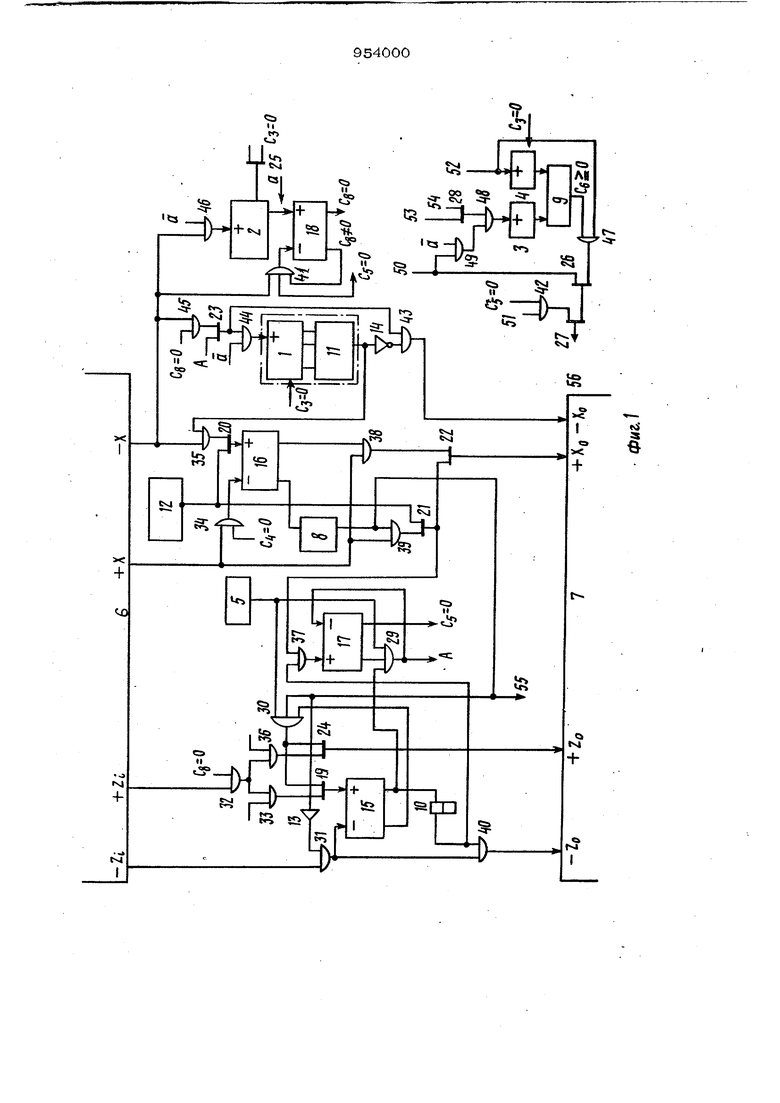
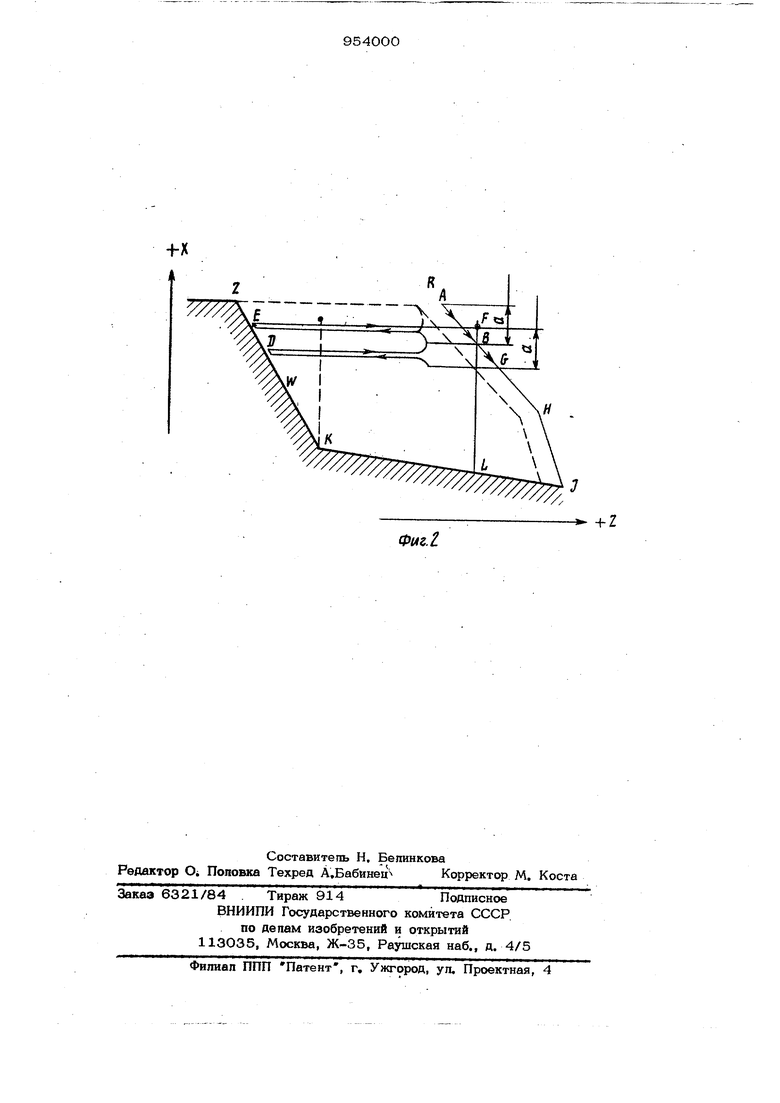
(54) ЦИФРОВОЕ УСТРСЙСТВО ДЛЯ ДВУХКООРДИНАТНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМ СТАНКОМ Изобретение относится к автоматике, в частности к устройствам управления метаппорежущими станками, предотвращающими поломку резца и уменьшающими время простоя станка. Известно устройство дпя управления станком, в котором при превыщении на главном щпинделе станка максимально допустимой величины крутящего момента резец отводится от заготовки, уменьщая таким образом крутящий момент. В тако устройстве поддерживают оптимальную ве личину нагрузки, равную верхнему допустимому значению, что позволяет эксплуатировать станок с максимальной эффективностью L-U Однако при движении резца во время обработки заготовки по контуру, заданному программой, незатачиваемая часть резца может соприкасаться с заготовкой и производить по ней удары. Это приводит к поломке резца, поскольку незатачиваемая часть резца не является такой же прочной, как его режущая кромка. Наиболее близким по технической сущности к изобретению является устройство дпя программного управления, содер жащее блок задания и распределения информации, подключенный выходами через взаимосвязанные элементы И, ИЛИ и задержки и суммирующие и реверсивные счетчики к блокам управления координатными приводами 2. Недостатком известного устройства является низкая точность. Цель изобретения -- повышения точности устройства. Поставленная цель достигается тем, что цифровое устройство для дцухкоординатного управления металлорежущим станком, содержащее генератор эталонной частоты, выход которого подключен к первому входу первого и второго элементов И, блок распределения импульсов, соединенный первым выходом с вычитающим входом первого реверсивного счетчика через третий элемент И, вторым выходом - с суммирующим входом первого реверсивно.го счетчика через последовательно включенные четвертый эпемент И, пятый элемент И и первый элемент ИЛИ, третьим Еяыходом - с вычитающим входом второго реверсивного счетчика через шестой эпемент И, а четвертым выходом - с суммируюшим входом второго реверсивного счет чика через поспедоватепьно включенные седьмой эпемент И и второй эпемент ИЛИ элемент задержки, два суммирующих счет чика, восьмой эпемент И, четыре элемента ИЛИ и блок управления приводом, содержит триггер, ,бпок сравнения, два элемента НЕ, четыре эпемента ИЛИ, два реверсивных счетчика, детектор, два суммирующих счетчика, тринадцать элементов И и импульсный датчик предепьной нагрузки шпинделя, подключенный выходом к второму входу Второго эпемента ИЛИ и к первому входу третьего элемента ИЛИ, соединенного выходом с первым входом Девятого эпемента И и через четвертый .элемент ИЛИ - с первым входом блока управления приводом, нулевой выход второго реверсивного счетчика подключен к Второму входу четвертого эпемента ИЛИ через десятый элемент И, соединенный вторым входом с третьим выходом блока распределения импульсов и с первым входом одиннадцатого элемента И, выход которого подключен к второму входу третьего элемента ИЛИ, а второй вход - к первому выходу устройства, к второму входу второго элемента И, к входу первого эпемента НЕ и через эпемент задержки к информационному выходу второго реверсивного счетчика и к второму входу шестого- элемента И, второй вход девятого элемента И соединен с пер вым входом двенадцатого элемента И и через триггер с нулевым выходом первого реверсивного счетчика и с вторым вхо дом первого эпемента И,подключенного третьим входом к информационному выходу третьего реверсивного счетчика, сум мирующий вход которого соединен с выходом девятого эпемента И, вычитающий вход - с выходом первого эпемента И и с первым входом пятого элемента ИЛИ, а нулевой выход - с первыми входами тринадцатого и четырнадцатого элементов И, второй вход третьего элемента И по,ркпючен к выходу первого элемента НЕг а выход - к второму входу двенадцатого эпемента И, соединенного выходом с вторым входом блока управления приводом, третий вход которого подключен че- рез шестой элемент ИЛИ к выходу вось мого элемента И, соединенного первым входом с выходом четвертого элемента И второй вход шестого элемента ИЛИ подключен к второму входу первого элемента ИЛИ и к выходу второго элемента И, подсоединенного третьим входом к информационному выходу первого реверсивного счетчика, выход пятнадцатого элемента И подключен к четвертому входу блока управления приводом, первый вход - к выходу второго элемента НЕ, а второй вход - к выходу пятого элемента ИЛИ и к первому входу шестнадцатого элемента И, соединенного выходом с счетным входом первого суммирующего счетчика, управляющий вход которого подключен к нулевому выходу первого реверсивного счетчика, а выходы - к входам детектора, соединенного выходом с вторыми входами седьмого и четвертого элементов И и с входом второго элемента НЕ, второй вход пятого эпемента ИЛИ подкшочен к выходу семнадцатого элемента И, счетный вход второго суммируюшего счетчика соединен с выходом восемнадцатого эпемента И, управпяющий вход - с нулевым выходом первого реверсивного счетчика через седьмой элемент ИЛИ, а выход - с суммир)ующим входом четвертого реверсивного счетчика, подключенного вычитающим входом и информационным выходом к выходу и второму входу соответственно тринадцатого элемента И, а нулевым выходом - к второму входу четвертого элемента И и к первому входу семнадцатого элемента И, четвертый выход блока распредепения импульсов соединен с вторым входом семнадцатого, первым входом восемнадцатого и с третьим входом тринадцатого элементов И, входы блока сравнения подключены к выходам третьего и четвертого суммирующих счетчиков, а выход - к первому входу Девятнадцатого элемента И, соединенного выходом с первым входом восьмого элемента ИЛИ, выход которого подключен к первому входу девятого эпемента ИЛИ, подсоединенного выходом к второму выходу устройства, а вторым входомк выходу четырнадцатого элемента И, счетный вход третьего суммирующего счетчика подключен к вьГходу двадцатого эпемента И, соединенного выходами с выходами двадцать первого элемента И и десятого элемента ИЛИ, выход второго элемента НЕ подключен к вторым входам восьмого, шестнадцатого и восемнадцатого и к первому входу двадцать первого элементов И, причем вторые входы седьмого и восьмого элементов ИЛИ, ходы десятого элемента ИЛИ, счетный вход четвертого суммирующего счетчика и вто рые входы четырнадцатого, девятнадцатого и двадцать первого элементов И сое динены с соответствующими входами устройства. На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - пример контура заготовленной для обработки детали и путь режущей грани резца. Устройство содержит первый 1, второй. 2, третий 3 и четвертый 4 суммирую щие счетчики, генератор 5 эталонной час тоты, блок 6 распределения импульсов, блок 7 управления приводом, элемент в задержки, блок 9 сравнения, триггер 10, детектор 11, импульсный датчик 12 предельной нагрузки шпинделя, первый 13 и второй 14 элементы НЕ, первый 15, второй 16, третий 17 и четвертый 18 реверсивные счетчики, 19-28 с первого по десятый соответственно элементы ИЛИ 29-49 соответственно с первого по двад цать первый элементы И, 50-54 входы и 55, 56 выходы устройства. На фиг. 1 также обозначены j состояния счетчиков 1, 2, 15, 16 и 17 соответственно Устройство работает следующим образом. Генератор 5 формирует прямоугольные импульсы, которые имеют наперед заданную частоту. Программа работы записана на программоносителе, где cигнaлыDENJ ER, CR означают соответственно окончание операции распределения импульсов, начало программы, конец команды про- граммы, причем сигналы окончания считывания DE N , EF, CR поступают на входы 50, 51, 52 соответственно. Сигналы +Х, -X, t 7, и -Z снимаются с выходов блока 6, Детектор 11 срабатывает, когда содержимое счетчика 1 достигает заданного значения сигнала Я. Отрицательное значение этого сигнала ( 5) воздействует на вход элемента И 46, с выхода которого информация передается на вход счетчика 2 в качестве дополняющего сигнала. При появлении сигнала на входе 5О или в случае, когда информация счетчика 15 равна нулю (), счетчик 2 сбрасывается в ноль. Выходные сигналы счет чика 2 поступают на суммирующий вход счетчика 18, на выходе которого образуется один сигнал, когда его информация не равна нулю этот сигнал воздействует на вход элемента И 41. Сигнал, образующийся при нулевом состоянии счетчика 17, поступает на вход элемента И 41, выходной сигнал которого воздействует на вычитающий вход счетчика 18. Сигнал, появляющийся при нулевом состоянии счетчика 18, воздействует на вход элемента И 45, выходной сигнал которого поступает на входы элементов И 44 и 43 через элемент ИЛИ 23 KviecTe с сигналом с выхода элемента И 29, воздействующим также на вычитающий вход счетчика 17. Сигнал с выхода элемента НЕ 14 по ступает на вход элемента И 44, передающего информацию на вход счетчика 1. Состояние С.) счетчика 1 передается на вход детектора 11. Счетчик 1 сбрасывается в нуль, когда состояние С счетчика 15 становится равным ну гас. Сигнал с выхода детектора 11 поступает также на вход элемента И 43 через элемент НЕ 14, а выход элемента И 43 соединен с входом (-Х) блока 7. Кроме того, выход детектора 11 соединен с входом элемента И 35, выходные сигналы которого передаются на элемент ИЛИ 2О, Импульсный сигнал, образующийся при возрастании нагрузки на главном шпинделе станка выще допустимой предельной вепи.чины, появляется на выходе датчика 12, который соединен с суммирующим входом счетчика 16 через элемент ИЛИ 20, а также с одним из входов элементов ИЛИ 22 и И 37 через элемент ИЛИ 21. Сиг- нал, указывающий на наличие информации в счетчике 16,отличной от нулевого значения, поступает на вход элемента И 34, выходной сигнал которого передается на вычитающий вход счетчика 16, предназначенного для счета распределяемых импульсов при управлении в +Х направлении. Выходной сигнал этого счетчика при его нулевом состоянии поступает на вход +Х блока 7 через элементы И 38 и ИЛИ 22. На выходе счетчика 16 образуется короткий сигнал сразу после того, как его содержание становится равным нулю, при этом данный короткий импульс передается на элемент И 39 через элемент 8 задержки. Часть выходного сигнала элемента 8 задержки передается на выход 55 для перематывания программоносителя и на вход элемента И 31 через элемент НЕ 13. Генератор 5 подает импульсы на вхоы элементов И 29 и 30. Счетчик 17 считает импульсы, соответствующие длине хода станка в +Х направлении, что составляет функцию пре- выщения величины крутящего момента допустимого значения. 7 ..95 Счетчик Д5 предусмотрен для подсчета импупьсов при движении резца станка в направлении Во емя движения резца в направлении от точки А до точки Н (фиг. 2) распредепение импупьсов для -X направления подсчитывается счетчиками 1 и 2. При достижении информацией в счетчике 1 значения, соответствующего заданной величине с, На выходе детектора 11 формируется сигнал, вследствие чегс двигатель (не показан) прекращает свое движение в направлениях -X и (точка В). Одновременно счетчик 2 прекращает счет и его информация передается в счетчик 18. В течение интервала времени, когда резец стоит на месте, блок 6 распределяет импульсы ot точки в до точки Н, при этом распределяемые импульсы для направлений вдоль осей -X и под. считываются счетчиками 16 и 15 соответственно. По окончании указанного распределения, то есть в точке Н сигнал отличительной маркировки обеспечивает окон чание сигнала окончания распределения на входе 5О. Однако в случае, когда на выходе детектора.11 присутствует 1, а на выходе элемента И 49 - О, счетчик 3 не срабатывает. При считывании информации следукацего кадра (от точки Н до точки I ) информация счетчика 4 принимает следующее значение, при этом происходит распределение импульсов для -X и +Z направлений. Указанные распределяемые импульсы в этот промежуток времени считываются с помощью счетчиков 16 и 15. В это время при наличии сигнала на выходе детектора 11 информация в счетчике 3 сохраняет свое нулевое значение, в результате чего на выходе бпока 9 не образуется выходного сигнала. В связи с этим сигнал на входе 52 не вызывает образования сигнала окончания распределения импульсов на выходе 56. Далее после считывания следующего кадра (от точки I до точки К) pacnjieделяемые импульсы дия . направления вычитаются из числа, запомненного счетчиком 15. При достижении точки L (вр мя распределения импульсов от I до К), ту же координату, что и точка В, резец останавливается в точке В, при этом, информация счетчика 15 принимает нулевое значение, импульсы распределяют . ся для участка между. Ь и К, элемент И 40 открывается и резец соверщает обработку при движении от точки В до точки М в направлении -Z .Во время процесса 0 резания, если нагрузка крутящим моментом превыщает допустимое максимальное значение, резей движется в +Х направлении со скоростью, соответствующей превыщению величины крутящего момента (точка ). Число импупьсов, соответствующее указанному движению в +Х направпении, добавляется к числу счетчиков 16 и 17. В общем случае число импупьсов, соответствующее движению в +Х направлении, которое является функцией превыщения нагрузки крутящим моментом на главном шпинделе, подсчитывается счетчиками 16 и 17. При достижении резцом точки М производится считывание информации следующего кадра, при этом продолжается распределение импупьсов и резец движется от точки М до точки D. Распределяемые импупьсы при считывании от I до К и от К до Z в +Х направлении вычитаются из числа, запомненного счетчиком 16. Движение резца в-Z направлении определяются соответствующими распределяемыми импульсами. При достижении резцом точки Ю , в которой в соответствии с программой резей останавливается, информация счетчика 16 принимает нулевое значение. Сразу же послеэтого на выходе эпемента 8 формируется сигнал с задержанным периодом, после чего распределяемые импульсы для +Х направления непосредственно поступают на блок 7 через элементы И 39 и ИЛИ 21 и 22. Вследствие этого резец движется из точки 13. в точку Е вдоль запрограммированного пути следования, причем распределяемые импупьсы для+Х направления в этот промежуток времени прибавляются к содержащейся в счетчике 17 информации через элемент ИЛИ 21. Когда выходной сигнал элемента 8 становится равным нулю (резец в это время находится в точке Е), резец останавливается и одновременно формируется сигнал на .выходе 55 для перематывания программной ленты. Генератор 5 воздействует через элементы И 44 и ИЛИ 24 на вход Z блока 7 и через элементы И 30 и ИЛИ 19 на счетчик 15, после чего резец начинает движение в направпении. Информация счетчика 15 при этом складывается с импульсами, соответствующи1 от движению резца в данном направлении. Движение резца в этот промежуток времени происходит с высокой скоростью, резец движется в направлении от , точки Е до точки F. При достижении резцом точки F, координата Z которой совпадает с координатой Z точки В, информация счетчика 15 сбрасываются в нупь.а элемент И 30 закрывается. В результате этого дви жение резца направлении прекращает ся. В то же самое время информация, на копленная в счетчиках 1, 2 и 4 также сбрасывается в нуль. Генератор 5 дапее генерирует сигнал прямоугольной формы, который через эле менты И 29, ИЛИ 23 и И 43 воздействует на. вход -X блок. 7, после чего резец начинает движение в -X направлении. Им пупьсы при этом подсчитываются счетчиком 1, Одновременно эти импульсы вычи таются из числа, запомненного счетчиком После достижения резцом точки В информация счетчика 17 сбрасывается в нупь, элемент И 29 закрывается и движение резца в -X направлении прекращается. Кроме того, после образования сигнала на входе 50 об окончании распределения импульсов, который проходит через элементы ИЛИ 26 и 27, устройство внов включается в работу. . По окончании считывания программы от .точки А до точки Н начинается распре деление импульсов для -X и 2. направле НИИ, поскольку информация счетчика 18 в это время не равна нулю, элементы И 45 и 32 закрыты, вследствие чего резец не движется. Импульсы для -X направления подсчитываются счетчиком 2. Выходной сигнал элемента И 41 вычитается из чис ла, запомненного счетчиком 18. При достижении резцом точки В, в которой резец останавливается, информация счетчика 18 сбрасывается в нуль и,- поскольку элементы И 45 и 32 в это время открыты, резец продолжает движение вдоль запрограммированного пути, а счетчик 1 достигает наперед заданной величины, на выходе детектора 11 образуется сигнал, после чего резец останавливается, а содержимое счетчика 2 замещается информодией счетчика 18. Счетчики 1 и 2 в это время не работают. Кроме того, открывается элемент И 35, вследствие чего вкгаочаются в работу счетчики 15 и 16, а резец начинает движение в Zi направлении, что происходит аналогичным образом. Далее операция резания продолжается с повторением рассмотренного цикла. Применение предлагаемого устройства позволяет устанавливать оптимальную .глубину резания, чем предотвращается повреждение резиа, так как обрабатываемая заготовка касается только режущей грани резца. Формула изобретения Цифровое устройство для двухкоординатного управления металлорежущим станком, содержащее генератор эталонной частоты, выход которого подключен к первому входу первого и второго элементов И, блок распределения импульсов, соединенный первым выходом с вычитающим входом первого реверсивного счетчика через третий элемент И, вторым выходом - с суммирующим входом первого реверсивного счетчика через последовательно включенные четвертый элемент И, пятый элегмент И и первый элемент ИЛИ, третьим выходом - с вычитающим входом второго реверсивного счетчика через щестой элемент И, а четвертым выходом - с суммирующим входом второго реверсивного счетчика через последовательно включенные седьмой элемент И и второй элемент ИЛИ, элемент задержки, два суммирующих счетчика, восьмой элемент И, четыре элемента ИЛИ и блок управления приводом, отличающееся тем, что, с целью повьпиения точности устройства, оно содержит триггер, блок сравнения, два элемента НЕ, четыре элемента ИЛИ, два реверсивных счетчика, детектор, два суммирующих счетчика, тринадцать элементов И и импульсный датчик предельной нагрузки шпинделя, подключенный выходом к второму входу второго элемента ИЛИ и к первому входу третьего элемента ИЛИ, соединенного выходом,с первым входом девятого элемента И и через четвертый элемент ИЛИ- с первым входом блока управления приводом, нулевой ныход второго реверсивного счетчика подключен к второму входу четвертого элемента ИЛИ через десятый элемент И, соединенный вторым входом с третьим выходом блока распределения импупьсов и с первым входом одиннадцатого эпемента И, выход которого подключен к второму входу третьего элемента ИЛИ, а второй вход - к первому выходу устройства, к второму входу второго элемента И, к входу первого элемента НЕ и через элемент задержки к информационному выходу второго реверсивного счетчика и к второму входу шестого элемента И, второй вход девятого элемента И соединен с первым входом -двенадцатого элемента 9 И и через триггер с нулевым выходом первого реверсивного счетчика и с вторым входом первого элемента И, подключенного третьим входом к информационному выходу третьего реверсивного счетчика, суммирующий вход которого соединен с выходом девятого элемента И, вычитающий вход - с выходом первого элемента И и с первым входом пятого элемента ИЛИ, а нулевой выход - с первыми входами тринадцатого и четырнадцатого элементов И, второй вход третьего элемента И подключен к выходу первого эле мента НЕ, а выход - к второму входу двенадцатого элемента И, соединенного выходом с вторым входом блока управления приводом, третий вход которого подключен: через шестой элемент ИЛИ к выходу восьмого элемента И, соединенного первым ъхор.см с выходом четвертого элемента И, второй вход шестого элемента ИЛИ подключен к второму входу перво го элемента ИЛИ и к выходу второго элемента И, подсоединенного третьим вхо дом к информационному выходу первого реверсивного счетчика, выход пятнадцатого элемента И .подключен к четвертому входу бпсжа управления приводом, первый вход - к выходу второго элемента НЕ, а второй вход - к выходу пятого элемента ИЛИ и к первому входу шестнадцатого элемента И, соединенного выходом с сче ным входом первого суммирующего счетчика, управляющий вход которого подключен к нулевому выходу первого реверсивного счетчика, а выходы - к входам детектора, соединенного выходсяи с вторыми входами седьмого в четвертого элементов И и с входом второго элемента НЕ, второй вход пятого элемента ИЛИ подключен к выходу семнадцатого элемента И, счетный вход второго суммирующего счетчика соединен с выходом восемнадцатого элемента И, управляющий вход с нулевым выходш первого реверсивного 012 счетчика через седьмой элемент ИЛИ, а выход - с суммирующим входом четвертого реверсивного счетчика, подключенного вычитающим входом и информационным выходом к выходу и второму входу соответственно тринадцатого элемента И, а нулевым выходом - к второму входу четвертого элемента И и к первому входу семнадцатого элемента И, четвертый выход блока распределения импульсов соединен с вторым входом семнадцатого, первым входом восемнадцатого и с третьим входом тринадцатого элементов И, входы блока сравнения подключены к выходам третьего и четвертого суммирующих счетчиков, а выход - к первому входу девятнадцатого элемента И, соединенного выходом с nepBbiM входом восьмого элемента ИЛИ, выход которого подключен к первому входу девятого элемента ИЛИ, подсоединенного выходом к второму выходу устрюйства, а вторым входомк выходу четырнадцатого э.лемента И, счетный вход третьего суммирующего счетчика подключен к выходу двадцатого элемента И, соединенного входами с вы:Ходами двадцать первого элемента И и десятого элемента: ИЛИ, выход второго элемента НЕ подключен к вторым входам восьмого, шестнадцатого и восемнадцатого и к первому входу двадцать первого элементов И, причем вторые входы седьмого и восьмого элементов ИЛИ, входы десятого элемента ИЛИ, счетный вход четвертого суммирующего счетчика и вторые входы четырнадцатого, девятнадцатого и двадцать первого элементов И соединены с соответствующими входами устройства. Источники информации, принятые во внимание при экспертизе 1. Патент Японии № 45-24594, кл. q 05 В 19/00, опублик. 1970. 2, Авторское свидетельство СССР № 3084lfe, кл. Q 05 В 19/18, 1968.
й
||
J
«: II
с2
-HiK,
-н.
н
ОЭ
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазовый детектор | 1981 |
|
SU953693A1 |
| Устройство для моделирования дискретного радиоканала | 1980 |
|
SU962999A1 |
| Устройство для моделирования систем массового обслуживания | 1982 |
|
SU1048480A1 |
| Устройство управляемой задержки импульсов | 1980 |
|
SU936412A1 |
| Устройство для синхронизации приемника телеграфных сигналов | 1980 |
|
SU970715A1 |
| Устройство для программного управления положением вала электродвигателя | 1980 |
|
SU907512A1 |
| Устройство для задержки импульсов | 1981 |
|
SU957421A1 |
| Квадратор | 1977 |
|
SU674015A1 |
| Устройство для моделирования систем массового обслуживания | 1983 |
|
SU1088003A1 |
| Преобразователь перемещения в код | 1980 |
|
SU935996A1 |
X
(vj
I
