Изобретение относится ксельскому хозяйству, в частности к кормле нию животных. .
Известен дозатор измельченных кормов, включающий загрузочное устройство с датчиком уровня, каркас, . приемную KciMepy и планчатый барабан установленные над вибролотком, закрепленным посредством упругих подвесок на основании, связанном с рамой, и привод, взаимодействующий с вибролотком 1.
Недостаток такого дозатора низкая точность дозирования корма.
Наиболее близким по технической сущности к.предлагаемому являемся дозатор, включающий загрузочное устройство с датчиком уровня корма и планчатый барабан, установленные над вибролотком, закрепленным посредством упругих подвесок на основании, связанном с рамой, блок управления на два входа, первым входом связанный с датчиком высоты слоя корма, установленным над вибролотком, взаимодействующим с виброприводом, имеющим обмотку возбуждения 2 .
Недостаток известного дозатора низкая точность дозирования корма.
Цель изобретения - повышение точности дозирования корма.
Поставленная цель достигается тем, что дозатор снабжен датчиком; амплитуды колебаний вибролотка и тиристорным регулятором напряжения, причем датчик амплитуды колебаний вибролотка установлен на вибролотке и связан с вторым входсм
10 блока управления, причем последний связан вьисодом с тиристорным.регулятором напряжения, который, соединен с обмоткой возбуждения вибропривода .
15
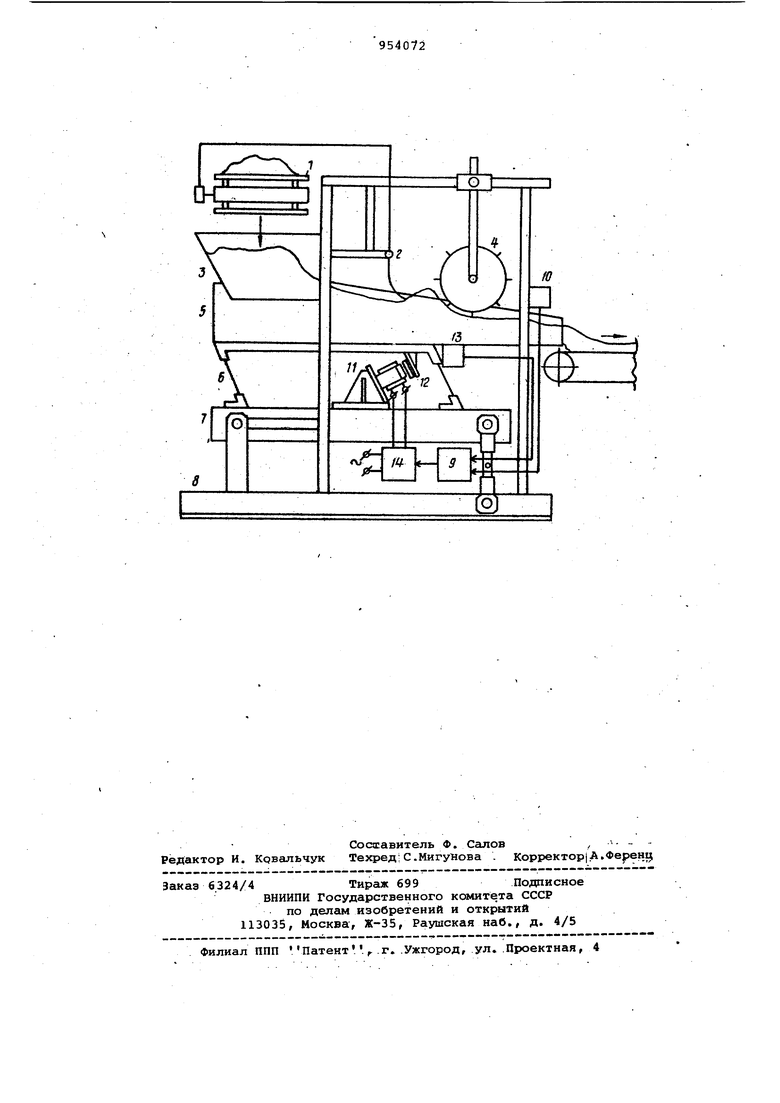
На чертеже схематично изображен дозатор измельченных кормов.
Дозатор включает загрузочное устройство 1 с датчиком 2 уровня корма, приемную камеру 3 и планчатый
20 барабан 4, установленные над вибролотком 5, закрепленным посредством упругих подвесок 6 на основании 7, связанном с рамой 8, блок 9 управления на дба входа, первым входом
25 связанный с .-Сдатчиком 10 высоты слоя корма, вибропривод 11, имеющий обмотку 12 возбужденияfдатчик 13 амплитуды колебаний вибролотка, тиристорный регулятор 14 напряже30ния, причем датчик 13 амплитуды колебаний вибролотка установлен на вибролотке 5 и связан со вторым входом блока 9 управления, связанного выходом с тиристорным регулятором 1 напряжения, соединенным с обмоткой 12 возбуждения вибропривода 11, а датчик 10 высоты слоя корма установлен над вибролотком 5, взаимодействующим с виброприводом 11.
Дозатор работает следующим образом.
Подаваемый загрузочным устрой ством 1 дозируемый корм поступает через приемную камеру 3 на виЬролрток 5, приводимый в движение, виброприводом 11, Слой корма на вибролотке 5 разравнивается и регулиру ется по высоте планчатым барабаном i 4, имеющим .возможность вертикального и горизонтального перемещения в зависимости от производительности, вида корма и подается далее. 10 высоты слоя корма копирует поверхность слоя корма и подает сигнал на первый вход блока 9 управления, а датчик 13 амплитуды колеЬа ВИЙ вибролотка 5 контролирует величину амплитуды колебаний вибролотка 5 и подает сигнал на второй вход блка 9 управления. Полученный результирующий сигнал поступает на тиристорный регулятор 14 напряжения, который изменяет величинунапряжения, подаваемого на обмотку 12 возбуждения вибропривода Т.
При уменьшении амплитуды колебаний виброототка 5 (увеличение массы корма) при неизменной высоте слоя корма датчик 13 амплитуда колебаний вибролотка 5 подает уменьшенный сигнал, пропорциональный уменьшению амплитуды, сигнал на вход блока 9 управления, изменяя результирующий сигнал на выходе, и тиристорный регулятор 14 увеличивает напряжение на обмотке 12 возбуждения на виброприводе 11 и тем самым амплитуду колебаний вибролотка 5 до тех пор,пока, результирующий сигнал на выходе блока 9 управления не будет
соответствовать номинальной производительности ви.бролотка 5.
При увеличении амплитуды колебаний вибролотка 5 происходит уменьшение напряжения на обмотке ,12 возбуждения , при этом происходит уменьшение амплитуды колебаний вибролотка 5 до тех пир, пока производительность вибролотка 5 не станет номинальной.
Таким образом, предлагаемыйдозатор измельченного корма обеспечивает повьшение точности дозирования корма.
Формула изобретения
Дозатор измельченных кормов, вклчающий загрузочное тустройство с датчиком уровня корма, приемную камеру и пластинчатый барабан, установлеуные- над вибролотком, закрепленные посредством упругих подвесок на основании, связанной с рамой блок управления на два входа, первым входом связанный с датчиком высоты слоя корма, установленным над вибролотком, взаимодействующим с виброп иводом, имеющим .обмотку возбуждения, отличающийся тем, что, с целью повышения точндсти дозирования корма, он снабжен датчиком амплитуды колебаний вибролотка и тиристорным регулятором, напряжения , причем ; датчик амплитуды колебаний вибролотка установлен на вибролотке и связан с вторым входом блока управления, причем последний связан выходом с тиристорным регулятором напряжения, соединен с обмоткой возбуждения вибропривода.
Источники информации, принятые во внимание при экспертизе
1.Патент Франции 1896532, кл. А 01 К 5/02, 1962.
2.Авторское свидетельство СССР по заявке 2916997/30-15, кл. А 01 К 5/02, 1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вибрационным загрузочным бункером | 1981 |
|
SU960102A1 |
| Устройство для управления вибрационным загрузочным бункером | 1983 |
|
SU1093650A1 |
| Способ управления вибрационным дозатором | 1980 |
|
SU1037956A1 |
| Устройство для автоматического управления дозатором | 1980 |
|
SU897292A1 |
| Устройство для управления дозатором сыпучих кормов | 1980 |
|
SU935030A1 |
| Дозатор измельченных кормов | 1979 |
|
SU820754A1 |
| Способ управления дозатором | 1979 |
|
SU856554A1 |
| Подающее устройство дозатора измельченных кормов | 1980 |
|
SU935029A1 |
| Устройство дозированной выдачи корнеклубнеплодов | 1986 |
|
SU1338823A1 |
| Устройство для выгрузки сыпучего материала из бункера | 1986 |
|
SU1318501A1 |