(Sk) СПОСОЕ УПРАВЛЕНИЯ ВИБРАЦИОННЫМ ЗАГРУЗОЧНЫМ
БУНКЕРОМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вибрационным загрузочным бункером | 1983 |
|
SU1093650A1 |
| Способ управления вибрационным дозатором | 1980 |
|
SU1037956A1 |
| Устройство для автоматического управления дозатором | 1980 |
|
SU897292A1 |
| Способ управления дозатором | 1979 |
|
SU856554A1 |
| Дозатор измельченных кормов | 1981 |
|
SU954072A1 |
| Устройство управления вибрационным питателем для загрузки железнодорожных вагонов | 1989 |
|
SU1791288A1 |
| Вибропривод съемного гребня чесальной машины | 1976 |
|
SU753937A1 |
| ЭЛЕКТРОВИБРАЦИОННОЕ УСТРОЙСТВО | 1994 |
|
RU2116143C1 |
| Вибропривод съемного гребня чесальной машины | 1984 |
|
SU1227726A1 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДОЙ ПРИ АВТОМАТИЧЕСКОЙ НАСТРОЙКЕ НА РЕЗОНАНСНЫЙ РЕЖИМ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2653961C1 |
1
Изобретение относится к,вибротранспортной технике и может быть использовано для автоматизации транспортно-загрузочных операций, и в частности в вибрационных загрузочных устройствах.
Известен способ управления, заключающийся в регулировании амплитуды колебаний вибрационного загрузочного устройства путем изменения маг- )о нитного потока вибродвигателя. При регулировании амплитуды колебаний часть рабочего магнитного потока, создаваемого обмоткой электромагнита, замыкается через шунт и не ох- is ватывает якорь электромагнита. В зависимости от положения шунта развивается большее или меньшее тяговое усилие и соответственно, изменяется .амплитуда колебания подвижной части 20 привода 1.
Недостатком этого способа является низкая надежность и большая инерционность управления в связи с .наличием механически подвижных элементов,, а также потери энергии в шунте.. ,
Известен также способ управления. вибрационным загрузочным бункером путем регулирования амплитуды колебаний 2. .
Недостатком такого устройства является низкая надежность и невысокая точность управления.
Цель изобретения - повышение надежности и точности управления.
Эта цель достигается тем, что измеряют высоту слоя материала на вибролотке и собственную частоту колебаний вибролотка с материалом, определяют их произведение, а регулирование амплитуды колебания вибродвигателя производят по величине рассогласования полученного произведения с заданным значением;
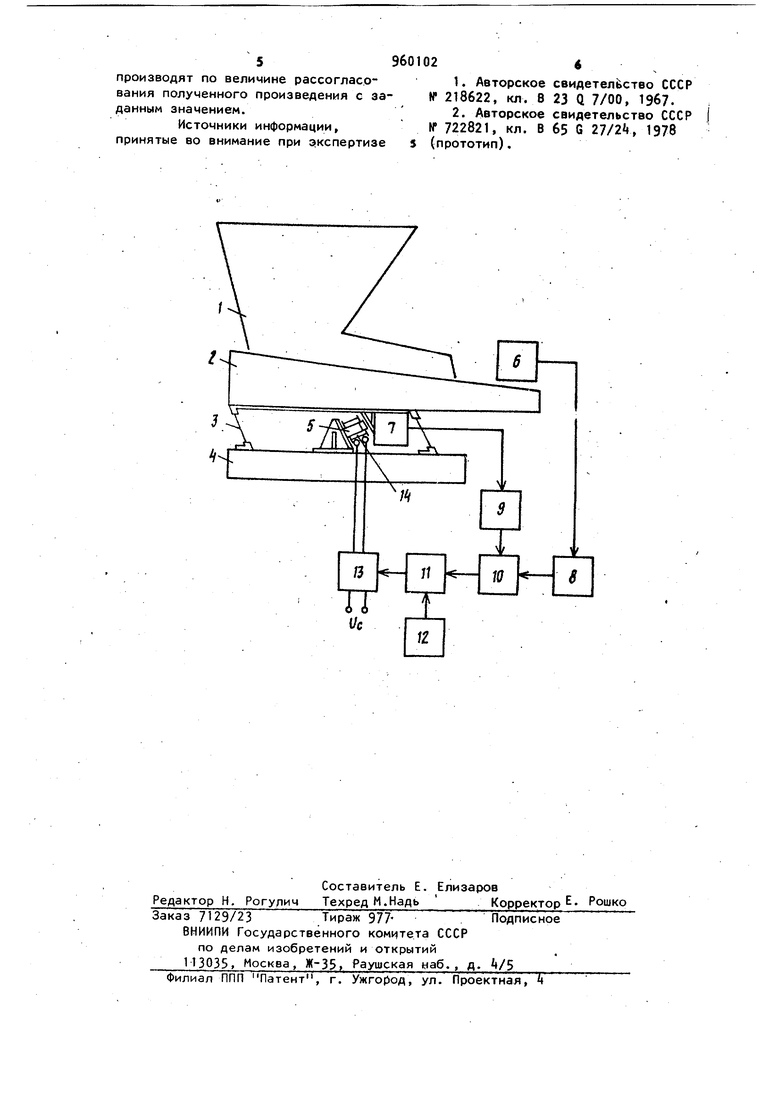
На чертеже представлена блок-схема устройства, реализующая предлагаемый способ. Бункер 1 установлен над вибролот ком 2, закрепленным подвесками 3 на основании Ц и приводимым в движение электромагнитным вибродвигателем 5. Датчик 6 высоты слоя и датчик 7 час тоты колебаний через усилители 8 и 9 связаны с двумя входами блока 10 умножения, выход которого подключен к блоку 11 .сравнения, имеющего задатчи 12, соединенному с тиристорным регулятором 13 амплитуды напряжения, включаемого в сеть переменного тока и питающего обмотку Ik возбуждения вибродвигателя 5. Управление вибрационным загрузочным устройством осуществляется следующим образом. Из бункера 1 мат.ериал поступает на приводимый в движение вибродвигателем 5 вибрационный поток 2, котор равномерно подает материал -а смеситель непрерывного действия. Сигнал датчика 6 высоты слоя усиливают уси лителем 8, а сигнал датчика 7 частоты колебаний - усилителем 9.и, подают на входы блока 10 умножения. Полученный в результате умножения сигнал сравнивают в блоке 10 сравнения с сигналом задатчика 12 и подают на тиристорный регуг тор 13 напряжения / который изменяет величину амплитуды напряженияу подаваемого на обмотку И возбуждения вибродвигателя 5 в зависимости от н пряжения рассогласования заданного и полученного сигналов до ликвидации рассогласования. При увеличении слоя материала на вибролотке 2 датчик 6 высоты слоя подает пропорционально увеличенный сигнал, который учитывая величину сигнала датчика 7 частоты, соответственно,, изменяет с.игнал на выхо де блока 10 умножения. Благодаря этому, тиристорный регулятор 13 напряжения уменьшает величину напряжения на обмотке It возбуждения и соответственно, ампли туду колебания вибролотка 2. Этот процесс продолжается До тех пор, пока произведение сигналов обоих датчиков не равно сигналу задатчика а расход подаваемого материала - за данному значению. При уменьшении высоты слоя материала ниже номиналь ного уровня, напряжение, подаваемое. на обмотку возбуждения, увеличивают до величины соответствующей номинальному значению расхода подаваемого материала. При изменении массы материала в бункере и на лотке изменяется собственная частота колебания вибросистемы и соответственно, количество материала,сходящего со среза лотка. С увеличением частоты колебания вибролотка по сигналу датчика 7 частоты колебаний изменяется результирующий сигнал на выходе блока 10 умножения и уменьшается напряжение на обмотке возбуждения и амплитуда колебаний лотка. В результате уменьшения скорости виброподачи количество подаваемого материала уменьшается до установленного номинального значения. При уменьшении частоты колебаний скорость виброподачи и расход материала автоматически увеличивается до номинального значения. Предлагаемый способ управления, позволяет поддерживать на строго определенном уровне производительность вибрационного загрузочного устройства. Применение способа повышает надежность управления и точность подачи материала при работе установки, расширяет пределы плавного автоматического регулирования производительности вибрационного загрузочного устройстЕ1а и обеспечивает подачу сыпучих, гранулированных кормов и минеральных удобрений по заданной программе рациона, что значительно улучшает качество приготавливаемых кормо-смесей. и позволяет более эффективно использовать применяемые ингредиенты смесей. Формула изобретения Способ управления вибрационным загрузочным бункером путем регулирования амплитуды колебания вибродвигателя, отличающийся тем, что, с целью повышения надежности и точности управления, измеряют высоту слоя материала на вибролотке и собственную частоту колебания вибролотка с материалом, определяют их произведение, а регулирование амплитуды колебания вибродвигателя
производят no величине рассогласования полученного произведения с заданным значением.
Источники информации, принятые во внимание при э кспертизе
