(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНШ ДОЗАТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления дозатором | 1979 |
|
SU856554A1 |
| Способ управления вибрационным дозатором | 1980 |
|
SU1037956A1 |
| Устройство для управления вибрационным загрузочным бункером | 1983 |
|
SU1093650A1 |
| Способ управления вибрационным загрузочным бункером | 1981 |
|
SU960102A1 |
| Дозатор измельченных кормов | 1981 |
|
SU954072A1 |
| Дозатор непрерывного действия | 1987 |
|
SU1506286A1 |
| Вибрационный гранулятор для порошкообразных материалов | 1990 |
|
SU1748850A1 |
| Вибродатчик вязкости | 1978 |
|
SU775667A1 |
| Подающее устройство дозатора измельченных кормов | 1980 |
|
SU935029A1 |
| Лотковый вибропитатель для сыпучих материалов | 1990 |
|
SU1794812A1 |
1
Изобретение относится к устройствам для регулирования, контроля и управления работой дробящих, измельчающих и дозирунидих установок и может быть использовано в устройствах для подачи плохосыпучих материалов, преимущественно при изготовлении кормосмесей.
Известно устройство для измерения расхода сыпучего материала весовым ленточным транспортером и током возбуждения исполшттельного механизма вибропитателя р.
Данное устройство для автоматического управления дозатором представляет собой сложную весоизмерительную систему с приборами и регуляторами и не обеспечивает требуемой надежности в работе и необходимой равномерности подачи легкого плохосыпучего материала в условиях сельскохозяйственного производства.
Наиболее близким по технической сущности к изобретению является
устройство для автоматического управления дозатором, содержащее датчик высоты слоя с первым усилителем, вибрационный лоток, установленный на раме с помощью упругих подвесок, и вибродвигатель f 2 J.
Работа устройства основана на изменении омического сопротивления в цепи гибких электродов. Известное устройство предназначено
10 только для контроля наличия матери ша на рабочем органе и не позволяет контролировать количество подаваемого материала.
Цель изобретения- - повьшение точ15ности управления.
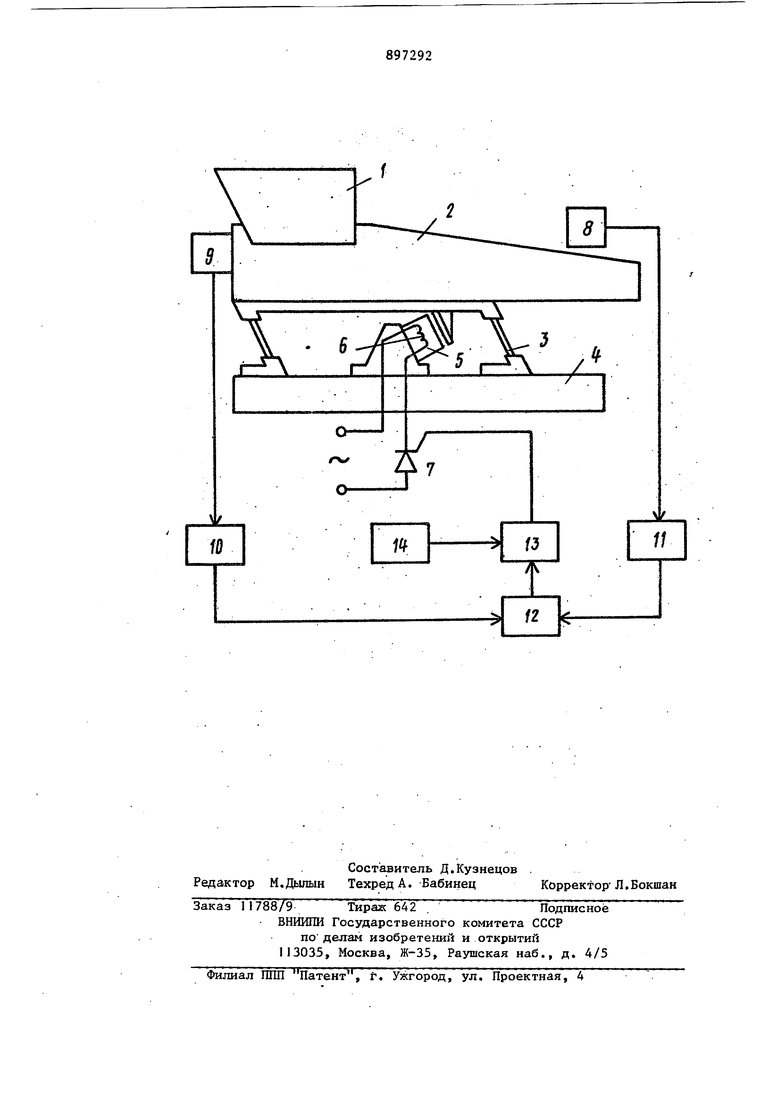
Поставленная цель достигается тем, что устройство для автоматического управления дозатором, содержащее датчик высоты слоя с первым уси20лителем, вибрационньп лоток, установленньп на раме с помощью упругих подвесок и вибродвигатель, снабжено датчиком амплитуды колебаний. вторым усилителем, блоком умножения, регулятором,задатчиком и тиристором, причем датчик амплитуды колебаний через второй усилитель подключен к одному из входов блока умножения, другой вход которого соеди нен с первым усилителем, задатчик соедине.и с одним из входов регулятора, другой вход которого подключе к выходу блока умножения, а выход р гулятора подключен к управляющему электроду тиристора, который включе в цепь обмотки возбу хдения вибродви гателя. На Чертеже представлена блок-схе ма устройства. Приемная камера 1 установлена на вибрационным лотком 2, закрепленным подвесками 3 на раме 4. На раме 4 также закреплен вибродвигатель 5 с обмоткой возбузздения 6, питаемой от сети переменного тока через тиристор 7. Датчик 8 высоты слоя и датчик 9 агшлитуды колебания через усилители 10 и 11 связаны с блоком умножения 12. Выход регулятора 13, связанного с задатчиком 14, соедине с управляющим электродом тиристора 7. Устройство работает следукнцим образом. Из приемной камеры 1 дозируемый материал поступает на приводимьп1 в движение вибродвигателем 5 вибрационный лоток 2, который равномерно подает материал далее по тех нологической линии, например, в смеситель кормов непрерывного действия. Сигнал датчика 8 высоты слоя материала на лотке усиливают усилителем 11, а сигнал датчика 9 амплитуды колебаний лотка - усилителем 10 и подают на вход блока умножения 12. Полученный в результате умножения сигнал подают на регулятор 13, сравнивают с сигналом зада чика 14 и подают на управляющий .электрод тиристора 7, изменяющего напряжение на обмотке вибродвигате ля в зависимости от направления рассогласования заданного и ного сигналов, до ликвидации рассогласования. При поступлении массы из камеры 1 на лоток 2 больше нормального значения датчик 8 . высоты слоя подает увеличенный про 24 порционально увеличению, высоты слоя сигнал и за счет этого регулятор 13 посредством тиристора 7 уменьшает величину напряжения .на обмотке возбу хдения 6 и тем самым амплитуду колебаний лотка 2 до тех пор пока произведение сигналов обоих датчиков не будет равно заранее заданному сигналу задатчика, а расход дозируемого материала номинальному значению.. При уменьшении поступающей на лоток 2 массы материала напряжение на обмотке возбуддения 6 и - соответственно амплитуду колебания лотка увеличивают до величины, соответствующей номинальному значению расхода материала. Применение данного устройства повышает равномерность подачи измельченного стебельчатого корма на 12-16% улучшает качество кормосмесей и повышает производительность труда на 9-11%. Формула изобретения Устройство для автоматического управления дозатором, содержащее датчик высоты слоя с первым усилителем, вибрационный лоток, установленный на раме с помощью упругих подвесок и вибродвигатель, о. тличающеес я тем, что, с целью повьшения точности управления, оно снабжено датчиком амплитуды колебаний, вторым усилителем, блоком у шожения, регулятором, задатчиком и тиристором, причем датчик амплитуды колебаний через второй усилитель подключен к одному из входов блока умножения, другой вход котарого соединен с первым усилителем, задатчик соединен с одним из входов регулятора, другой вход которого подключен к выходу блока умножения, а выход регулятора подключен к управлякяцему электроду тиристора, который включен в цепь обмотки возбуждения вибродвигателЯ| Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 609553, кл. В 02 С 25/00, 1976. 2.Агейкин Д.И. и др. Датчики контроля и регулирования. М., Машиностроение, 1965, с. 448-450.
