Изобретение относится к способам управления устройствами, имеющими вспомогательное назначение, для контроля и регулирования работы дробящих, измельчающих и дозирующих установок и может быть использовано преимущественно в устройствах для приготовления кормосмесей.
Известен способ управления дозатором, заключающийся в подаче сыпучего материала на вибрационный лото измерении массы материала и регулировании частоты вибродвигателя 1 ..
Однако данный способ не обеспечивает высокой точности управления.
Наиболее, близким к предлагаемому по технической сущности является , способ управления вибрационным дозатором, включающий измерение высоты слоя материала на вибролотке и амплиууды колебания вибролотка,вычислёййе произведения измеренных величин и изменение режима работы виброВвигателя дозатора СЗ Недостатком, известного способа является узкий диалазон регулирова : НИИ производительности дозатора и низкий КПД работы установки.
В вибродвигателях, работающих с переменной частотой, регулирова- ние возможно в небольшом диапазоне частот. Расширение диапазона частот вызывает необходимость одновременного изменения частоты собственных колебаний подвижной системы за счет изменения её жесткости или приведенной массы.
Частота возмуща.ющей силы вибродвигателя должна бЬть близкой ( или равной) частоте собственных койебаний подвижной системы.-При этом колебательное движение вибролотка достигается минимальной возмущающей силой. При регулировании частоту колебания вибродвигателя это соотношение частот нарушается и . доя привода вибролотка необходимо большее усилие.
- Цель изобретения - повышение точНости управления за счет расширения диапазона регулирования дозатора.
Поставленная цель достигается тем, что согласно способу управления вибрационным дозатором, включающему измерение высоты слоя материала на вибролотке и амплитуды колебания вибролотка, вычисление произведения измеренньк величин и изменение режима Работы вибродвигателя дозатора, изменение режима работы вибродвигателя дозатора осуществляют изменением амплитуды колебаний вибродвигателя, п ичем изменение амплитуды колебаний вибродвигателя осуществляют до достижения вычисленным произведением заданного значения.
На чертеже представлена схема, реализующая предлагаемый способ.
Приемная камера 1 установлена над вибролотком 2, зaкpeпJJeнным подвесками 3 на раме 4. и приводимым в движение электромагнитным вибродвигателем 5. Датчик б высоты слоя и датчик 7 амплитуды колебания через усилители 8 и 9 связаны с двумя входами блока 10, умножения выход которого соединен с регуляторой 11 амплитуды напряжения, имеющим задатчик 12, включаемый в сеть переменного тока и соединенный с обмоткой 13 возбуждения электромагнитного вибродвигателя 5.
Управление дозатором осуществляется следующим образом.
. Из приемной камеры 1 дозируемый материал поступает на приводимый в движение электромагнитным вибродвигателем 5 вибролоток 2, который равномерно, подает материал далее по технологической линии, например в сместитель кормов непрерывного действия. Сигнал датчика б высоты слоя усиливают усилителем 8,. а сигнал датчика 7 амплитуды колебаний усилителем 9 и подают на входы блока 10 умножения. Полученный в результате умножения сигнал подают на вход регулятора 11 амплитуды напряжения, сравнивая с сигналом задатчика 12, который изменяет величину амплитуды напряжения, подаваемого на обмотку 13 возбуждения электромагнитного вибродвигателя 5, в зависимости от направления рассогласования заданного и полученного сигнала до ликвидации рассогласования. При увеличении слоя материала на вибролотке 2 датчик б высоты слоя подает пропорционально увеличенный сигнал, который соответственно изменяет сигнал на выходе блока умножения. Благода я этому регулятор 11 амплитуды напряжения уменьшает величину напряжения на,.обм6тке 13 возбуждения и, соотве ственно, уменьшается амплитуда колебания вибролотка 2. При этом собственная частота колебания подвижной системы и частота колебания вибродвкгателя остаются неизменными. Этот процесс продолжается до тех пор, пока произведение сигналов обоих датчиков не будет равным сигналу задатчика, а расход дозируемого материала - номинальному значению производительности дозатора. При уменьшении высоты слоя материала ниже .номинального значения напряжение, подаваемое наобмотку возбуждения, увеличивают до величины, соответствующей номинальному значеншо расхода дозируемого материала.
Применение предлагаемого способа повышает КПД работы установки на 5 6-9% за счет снижения мощности.
310379564
потребляекюй электромагнитньш вибро-сыпучих кормов по заданной программе
двигателем при работе дозатора, расраЦиойа г что значительно улучшает
ширяет пределы плавного регулирова-качество приготавливаемых, кормосменияг.лроизводительности дозатора исей и позволяет более эффективно
обеспечивает равномерн подачуиспользовать корма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вибрационным загрузочным бункером | 1981 |
|
SU960102A1 |
| Устройство для автоматического управления дозатором | 1980 |
|
SU897292A1 |
| Устройство для управления вибрационным загрузочным бункером | 1983 |
|
SU1093650A1 |
| Способ управления дозатором | 1979 |
|
SU856554A1 |
| Дозатор измельченных кормов | 1981 |
|
SU954072A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТЕХНИЧЕСКИ ОПТИМАЛЬНЫМ УГЛОМ НАКЛОНА НЕПОДВИЖНОЙ НАПРАВЛЯЮЩЕЙ ПОВЕРХНОСТИ ДВИЖЕНИЯ ВЗВЕШИВАЕМОЙ И ДОЗИРУЕМОЙ СЫПУЧЕЙ СМЕСИ САМОТЕКОМ ЗА СЧЕТ СИЛЫ ЗЕМНОГО ТЯГОТЕНИЯ ПРИ ПРИГОТОВЛЕНИИ И РАЗДАЧЕ КОРМОВ И КОРМОВЫХ СМЕСЕЙ В ЖИВОТНОВОДСТВЕ И ПТИЦЕВОДСТВЕ | 2014 |
|
RU2597437C2 |
| Подающее устройство дозатора измельченных кормов | 1980 |
|
SU935029A1 |
| ЭЛЕКТРОВИБРАЦИОННОЕ УСТРОЙСТВО | 1994 |
|
RU2116143C1 |
| Устройство для регулирования наклона фар транспортного средства | 1990 |
|
SU1837023A1 |
| Устройство управления вибрационным питателем для загрузки железнодорожных вагонов | 1989 |
|
SU1791288A1 |
СПОСОБ УПРАВЛЕНИЯ. ВИБРАЦИОННШ ДОЗАТОРСМ, включгиощий измерё ниё высоты слоя материала на вибро- лотке и амплитуды колебаний -вибролотка, вычисление произведения измеренных величин и изменение режима работы вибродвигателя дозатора, отличающийся тем, что, с. целью повышения точности управле- ния за счет расширения диапазона регулирования дозатора, изменение режима работы вибродвигателя дозатора осуществляют изменением амплитуды колебаний вибродвигателя, причем изменение амплитуды колебаний вибрбдвигателя осуществляют до .достижения вычисленным произведением заданного значения. (О 00 со сд а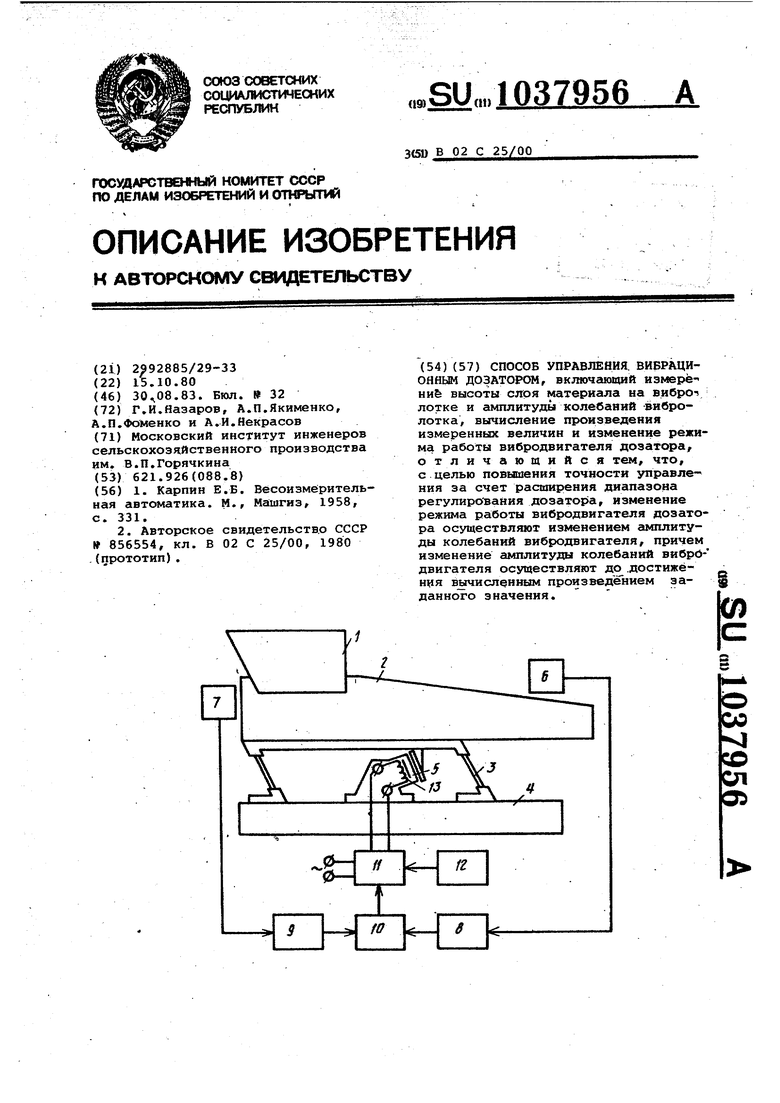
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Карпин Е.Б | |||
| Весоизмерительная автоматика | |||
| М., Машгнз, 1958, с | |||
| Накладной висячий замок | 1922 |
|
SU331A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления дозатором | 1979 |
|
SU856554A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| (прототип). | |||
