(54) МНОГОПОЗИЦИОННЫЙ ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ
ПРИВОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный пневмопривод | 1980 |
|
SU877158A1 |
| Система управления составной коробкой передач транспортного средства | 1990 |
|
SU1710377A1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015937C1 |
| ДИСКРЕТНОЕ ЗАПОРНО-РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1992 |
|
RU2037178C1 |
| МЕХАНИЗМ АВТОМАТИЗИРОВАННОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ В МЕХАНИЧЕСКОЙ СТУПЕНЧАТОЙ КОРОБКЕ ПЕРЕДАЧ | 1991 |
|
RU2015936C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 2021 |
|
RU2767676C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ КОРОБКИ ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2170678C1 |
| Система командного управления коробкой передач | 1989 |
|
SU1684116A1 |
| Устройство для управления гидрозамедлителем транспортного средства | 1982 |
|
SU1079486A1 |
| Цифровой имитатор воздушных давлений | 1985 |
|
SU1265728A1 |
1
Изобретение относится к многопозиционным приводам с электропневматическим управлением, обеспечивающим останов рабочего органа привода в любом заданном положении и может быть применен в станкостроении, ,текстильной легкой и других отраслях промышленности.
Известен многопозиционный привод, содержащий пневмоцилиндр, в гильзе которого выполнены каналы, соответствующие числу и расположению позиций привода и соединенные с запорными клапанами, выходы которых связаны с атмосферой, а управляющие входы подключены к линиям задания позиций, и два дросселя, каждый из которых подключен к разноименным полостям пневмоцилиндра и к источнику давления 1.
Недостаток известного многопозиционного привода - малое быстродействие.
Быстродействие такого типа приводов зависит от соотношения пневмосопротивлений дросселей, связывающих полости пневмоцилиндра с источником давления и каналоа, выполненных в гильзе.
Если пневмосопротивления входных дросселей значительно больще пневмосопротивления каналов в гильзе, то пневмоцилиндр
обеспечит большую скорость перемещени: рабочего органа, но не может обеспечить его точный останов в заданной позиции в силу того, что пневмоцилиндр начнет работать в незатухающем колебательном режиме.
Известен многопозиционный пневмопривод, содержащий пневмоцилиндр, каждая из полостей которого соединена через электропневмоклапан с соответствующим источником давления, жестко связанную с пневмоцилиндром рейку с двумя рядами отверстий, соответствующих числу и расположению позиций привода, электрические линии задания позиций, общей точкой связанные с первой клеммой источника напряжения, блок сравнения, три элемента ИЛИ, элемент «Па15 мять, элемент типа «Сопло-приемный канал, два приемных сопла и индикатор останова привода в заданной позиции 2 .
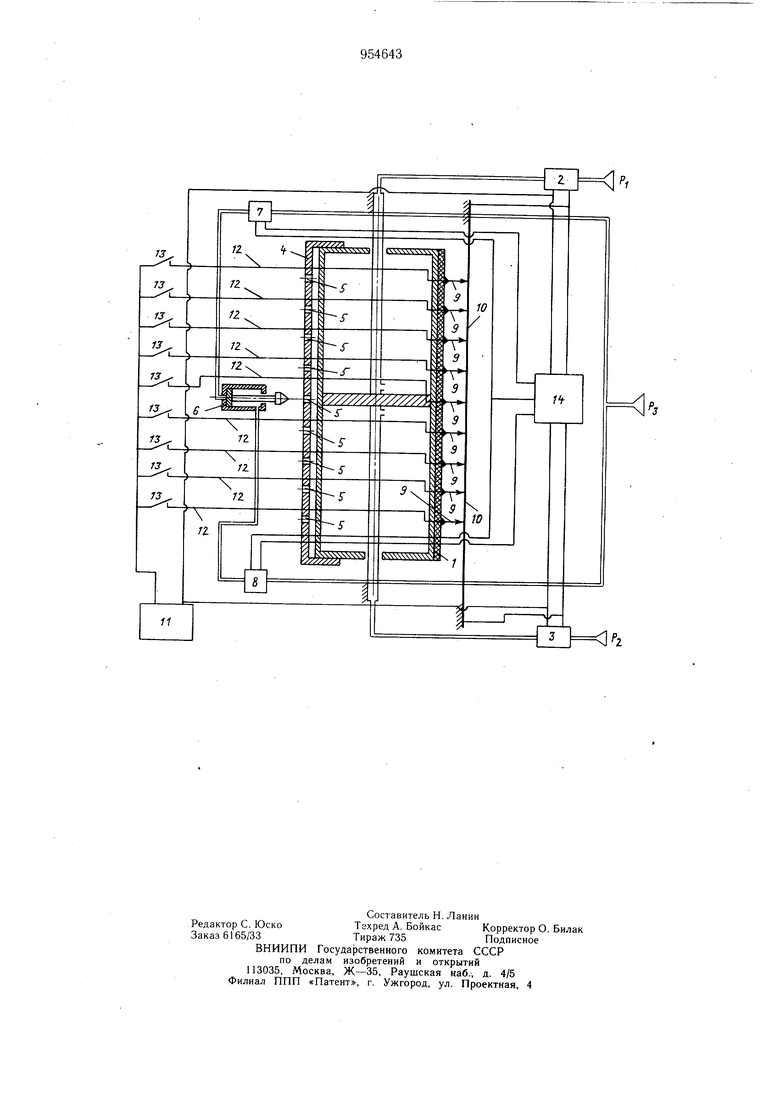
Данный привод обеспечивает высокое быстродействие при сохранении высокой точности останова в заданной позиции. Однако к его недостаткам следует отнести сложность конструкции, а также недостаточно высокую надежность работы и долговечность. Невысокая долговечность привода определяется тем, что в теле гильзы пневмоцилиндpa выполнены отверстия. Поэтому резиновые манжеты и кольца, применяемые для уплотнения поршней пневмоцилиндров, соприкасаясь при движении с кромками этих отверстий, быстро выходят из строя. Кроме того, резиновые уплотнения не имеют четких занимающих строго определенное положение кромок, что может привести к снижению точности останова. Использование поршней пневмоцилиндров из бронзы, фторопласта или капрона затруднено в силу жестких требований к точности их изготовления. Шаг позиционирования, т.е. расстояние между каналами в приводе не может быть меньше ширины поршня. В мощных (силовых) пневмоцилиндрах ширина поршня составляет несколько десятков миллиметров. Таким образом, недостатком известного привода является также сложность обеспечения малого (3-5мм) шага позиционирования. Цель изобретения - упрощение конструкции, повышение точности и надежности работы привода. Поставленная цель достигается тем, что многопозиционный привод, содержащий пневмоцилиндр с поршнем, каждая из полостей которого соединена через основной электропневмоклапан с соответствующим каналом питания, жестко связанную с пневмоцилиндром рейку с отверстиями, соответствующими числу и расположению позиций привода, и Электрические управляемые переключатели задания положения привода, входы которых соединены с первой клеммой источника напряжения, дополнительно содержит фиксатор, установленный с возможностью кинематического замыкания с отверстиями рейки, блок управления фиксатором, два дополнительных электропневмоклапана, выходы которых соединены с приводом фиксатора, контакты, жестко связанные с пневмоцилиндром и соответствующие числу и расположению позиций привода, и две изолированные одна от другой и расположенные на одной прямой токопроводящие шины, установленные с возможностью взаимодействия с контактами, причем зазор между шинами размещен на уровне расположения фиксатора, входы блока управления фиксатором подключены параллельно обмоткам основных электропневмоклапанов, а его выходы - к обмоткам дополнительных электропневмоклапанов, выходы электрических управляемых переключателей соединены с соответствующими контактами, а щины через обмотку соответствующих основных электропневмоклапанов подключены ко второй клемме источника напряжения. На чертеже приведена схема устройства. Привод состоит из пневмоцилиндра 1, полости которого через основные электропневмоклапаны 2 и 3 связаны с каналом давления PI и РЗ питания. Пневмоцилиндр 1 жестко связан с рейкой 4, имеющей отверстия 5, число и расположение которых соответствует числу и расположению позиций привода. Против начального положения привода (при неподвижном щтоке пневмоцилиндра начальное положение привода соответствует положению порщня) установлен фиксатор 6, в качестве привода которого может быть использован электромагнит, пневмоцилиндр и т.д. В данном случае фиксатор выполнен в виде пневмоцилиндра, полости которого через дополнительные электропневмоклапаны 7 и 8 связаны с каналом давления Pj питания. На пневмоцилиндре жестко закреплены электрические контакты 9, число и расположение которых соответствует числу и расположению позиций привода. Привод содержит также две электрически изолированные друг от друга неподвижные токопроводящие шины 10, установленные с зазором на уровне расположения фиксатора бис возможностью электрического взаимодействия с контактами 9. Каждая из шин 10 через обмотку соответствующего электропневмоклапана 1 и 3 подключена ко второй клемме источника 11 напряжения. Контакты 9 линиями 12 соединены через электрические управляемые переключатели 13 с первой клеммой источника 11 напряжения. Параллельно обмоткам электропневмоклапанов 2 и 3 включен блок 14 управления фиксатором 6. Обмотки электропневмоклапанов 7 и 8 подключены к выходам блока 14 управления фиксатором. Привод работает следующим образом. В исходном положении все переключатели 13 разомкнуты, а следовательно, обесточены и обмотки электропневмо(лапанов 2 и 3. Электропневмоклапаны 2 и 3 выполнены нормально закрытыми, т.е. при отсутствии напряжения на их обмотках они пропускают сжатый воздух от каналов давления Р| и Р2 питания соответственно в верхнюю и нижнюю полости пневмоцилиндра 1. Значения давлений Р, и Р подобраны таким образом, чтобы пневмоцилиндр 1 был неподвижен. При обесточенных обмотках электропневмоклапанов 2 и 3 на первом выходе блока 14 управления фиксатором 6 формируется сигнал, включающий электропневмоклапан 7, подающий сжатый воздух от канала давления Р питания в левую полость пневмоцилиндра-фиксатора 6. Конический конец щтока фиксатора 6 находится в отверс тии 5, расположенном против поршня пневмоцилиндра. Предположим, что привод находится в по ложении, изображенном на чертеже и его необходимо перевести в крайнюю нижнюю позицию. Для этого необходимо замкнуть верхний переключатель 13. При этом напряжение от источника 11 через контакт 9 и верхнюю щину 10 подается к обмотке электропневмоклапана 2. Одновременно напряжение подаете и на вход блока 14 управления
пневмоцилиндром-фиксатором 6. На первом выходе блока 14 сигнал пропадает, электропневмоклапан 7 выключается, а на втором выходе блока 14 появляется напряжение, включающее электропневмоклапан 8, подводящий давление Pj в правую полость пневмоцилиндра-фиксатора 6. Шток пневмоцилиндра-фиксатора 6 занимает крайнее левое положение (сжатый воздух из левой полости пневмоцилиндра-фиксатора 6 выдавливается через атмосферный канал выключенного электропневмоклапана).
Включается также электропневмоклапан 2 и через его атмосферный канал верхняя полость пневмоцилиндра 1 начинает опоражниваться. Под действием давления 1 пневмоцилиндр 1 начинает опускаться вниз, при этом верхний контакт 9 скользит по верхней шине 10, подводя напряжение к обмотке электропневмоклапана 2. Как только верхний контакт 9 оказывается в зазоре между шинами 10, т.е. в заданной позиции, электропневмоклапан 2 обесточивается и сжатый воздух от источника давления Р| начинает поступать в верхнюю полость пневмоцилиндра 1. Одновременно пропадает напряжение на входе блока 14 и на его первом выходе появляется сигнал, а на втором выходе сигнал пропадает. В результате электропневмоклапан 8 выключается, а электропневмоклапан 7 включается, подавая сжатый воздух от канала давления Р, питания в левую полость пневмоцилиндра-фиксатора 6. Шток фиксатора 6 занимает крайнее правое положение и его конический конец входит в верхнее отверстие 5 рейки 4; фиксируя пневмоцилиндр в заданной позиции. Быстродействие пневмоцилиндра-фиксатора 6 и его блока управления значительно выше быстродействия пневмоцилиндра 1. Поэтому пневмоцилиндр после отключения электропневмоклапана 2 не успевает «проскрчить заданную позицию. Более высокое быстродействие фиксатора позволяет также при подаче управляющей команды, т.е. замыкании соответствующего контакта, обеспечить сначала отвод штока фиксатора в крайнее левое положение, а затем уже перемещение пневмоцилиндра. Кроме того, выполнение конца штока пневмоцилиндра-фиксатора 6 конусообразным, позволяет обеспечить точный останов пневмоцилиндра в заданной позиции при разных скоростях его перемещения.
Аналогичным образом производится установка привода в любую из заданных позиций.
При неподвижном пневмоцилиндре 1 контакты 9 располагаются на штоке. Схема управления приводом остается неизменной.
Эффективность изобретения определяется упрощением конструкции многопозиционного привода, повышением его надежности и точности работы.
Формула изобретения
Многопозиционный электропневматичес.кий привод, содержащий пневмоцилиндр с поршнем, каждая, из полостей которого соединена через основной электропневмоклапан с соответствуюшим каналом питания, жестко связанную с пневмоцилиндром рейку с отверстиями, соответствующими числу и расположению позиций привода, и электрические управляемые переключатели задания положения привода, входы которых соединены с первой клеммой источника напряжения, отличающийся тем, что, с целью упрощения конструкции, повышения точности и надежности привода, он содержит фиксатор, установленный с возможностью кинематического замыкания с отверстиями рейки, блок управления фиксатором, два дополнительных электропневмоклапана, выходы которых соединены с приводом фиксатора, . контакты жестко связанные с пневмоцилиндром и соответствуюшие числу и расположению позиций привода, и две изолированные
одна от другой и расположенные на одной прямой токопроводящие щины, установленные с возможностью взаимодействия с контактами, причем зазор между шинами размещен на уровне расположения фиксатора, входы блока управления фиксатором подключены параллельно обмоткам основных электропневмоклапанов, а его выходы - к обмоткам дополнительных электропневмоклапанов, выходы электрических управляемых переключателей соединены с соответствующими контактами, а шины через обмотки соответствующих основных электропневмоклапанов подключены к второй клемме источника напряжения.
Источники информации, принятые во внимание при экспертизе
