1
Изобретение относится к средствам автоматизации производственных процессов и может быть применено в системах управления в химической, нефтехимической промышленностях и других отраслях промышленности.
Известно устройство многоканального управления, содержащее последовательно соединенные входной электрический коммутатор, блок сравнения с .задатчиком уставок, выключатель, выходной электрический коммутатор, пневматический аналоговый регулятор с задатчиком, электропневматические переключатели, элементы памяти и электропневматический аналоговый преобразователь , связанный с выходом входного электрического коммутатора и входом пневматического аналогового регулятора, выход которого через элементы памяти соединен с соплами зпектропневматических переключателей, обмотки которых соединены с выходом выходного электрического ком2
мутатора. Устройство поочередно подключается к различным кaнdлaм управления через соответствующие коммутаторы, а в отключенных каналах сигналы управления запоминаются Dl.
Недостатком устройства является жесткость построения программ управления, что не позволяет отдельными каналами управлять быстрее, чем другими о
10
Наиболее близким к предлагаемому по технической сущности является устройство, содержащее коммутирующую матрицу, на пересечении каналов строк и столбцов которой установлены блоки
15 формирования командных сигналов, выполненные 8 виде электромеханических реле, контакты которых соединены с выходами коммутатора, и программную матрицу с программными ключами, цепь
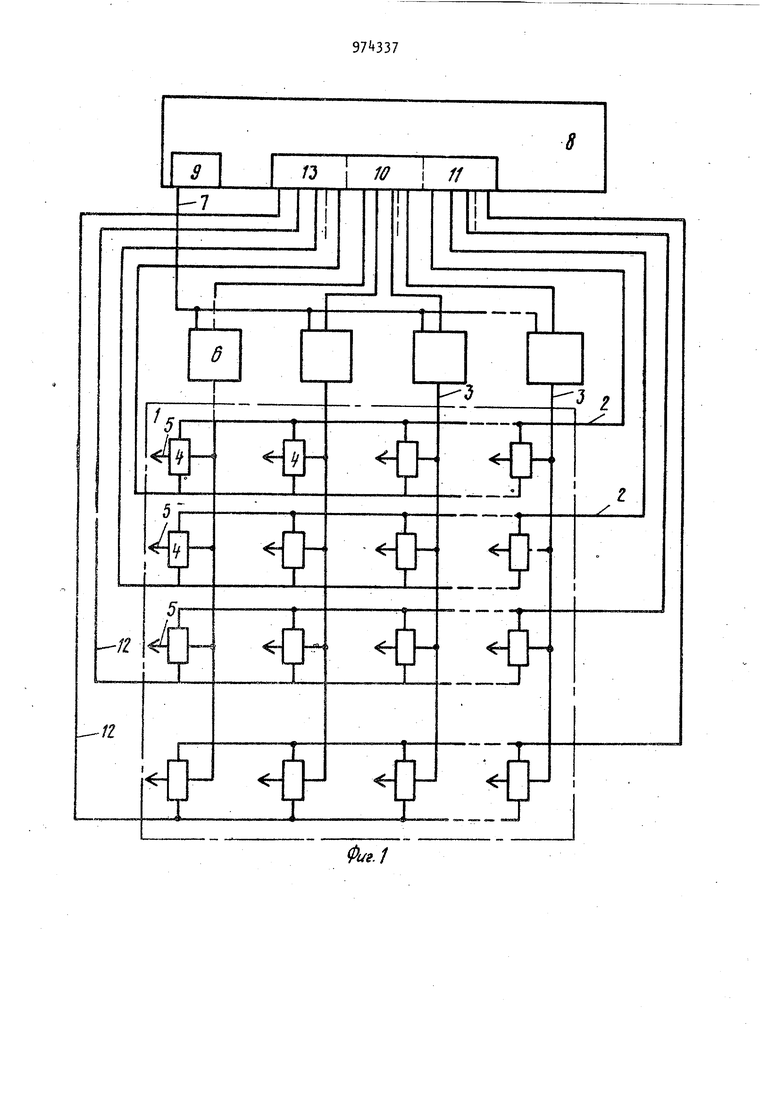
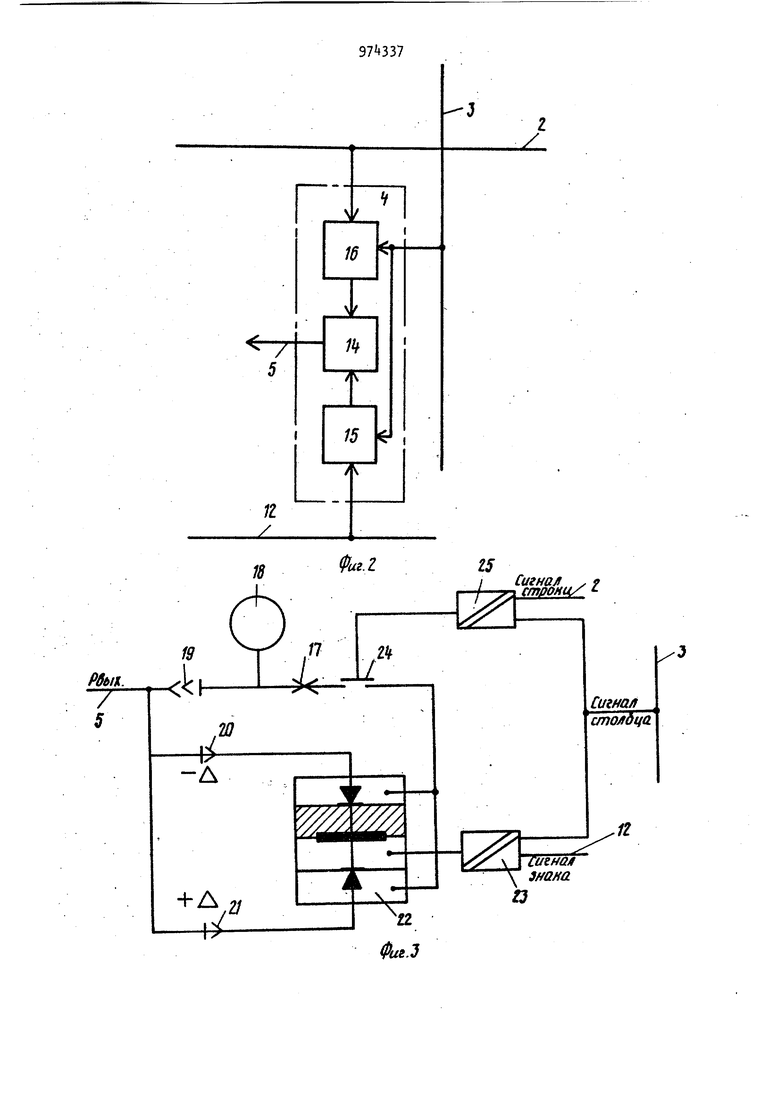
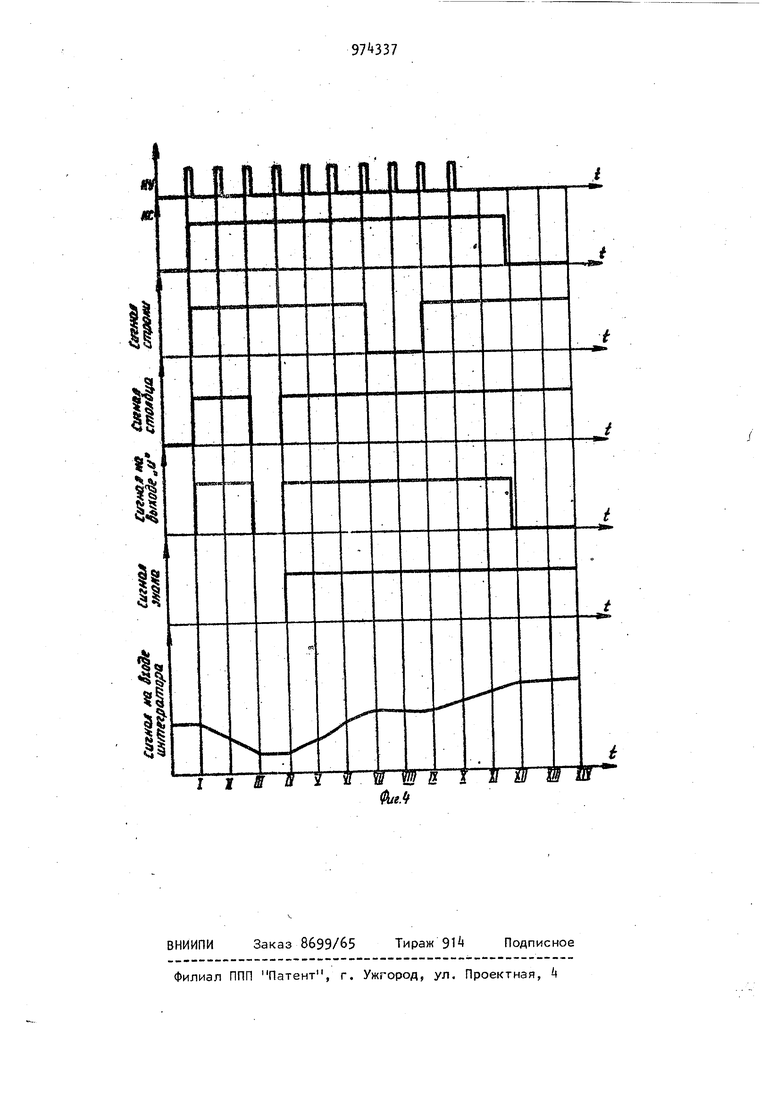
20 управления каждого из которых соединена с выходами программных ключей одной строки, в кртором обмотки электромеханических реле каждой строки соединены через диоды с выходами соответствующих ключей программной матрицы 2. Недостатком данного устройства является отсутствие защиты от сбоев в цепях управления Целью изобретения является повышение надежности Поставленная цель достигается тем что устройство многоканального управления, содержащее ЭВМ, коммутирующую матрицу, на пересечении каналов ; грек и столбцов которой установлены блоки формирования командных сигналов, каждый из которых выполнен а виде интегратора, узла задания знака и узла включения интегратора, причем выходы узлов задания знака и включения интегратора соединены со входами интегратора, выходы интеграторов подключены к выходным каналам устройства, каналы вывода дискретных управляющих сигналов ЭВМ соединены через каналы строк коммутирующей матрицы со входами узлов задания знака и с первыми входами узлов вклю чения интеграторов, снабжено элементами И, первые входы которых соеди- , нены с выходным каналом контрольного си: нала ЭВМ, вторые входы - с соотве ствую1цими каналами вывода дискретных управляющих сигналов ЭВМ, а выходы элементов И через каналы столбцов ко мутирующей матрицы подключены ко вто рым входам узлов включения интеграто ров „ При этом узлы задания знака выполнены с дополнительными вторыми вх дами, подключенными через столбцов коммутирующей матрицы к выходам злементов Ио На фиг о 1 изображена принципиальная схема устройства; на фиг„ 2 структурная схема блока ({юрмирования командного сигнала; на фиг 3 вариант выполненияблока формирования командного сигнала на пневматических элементах; на фиг. k - временная диаграмма работы устройства. Устройстро (см, фиг. 1) содержит коммутирующую матрицу 1, на пересече нии каналов строк 2 и столбцов 3.которой установлены блоки формирования командных сигналов, соединенных своими выходами с выходными каналами 5 устройства. Каналы столбцов 3 подключены к выходам элементов И 6, первый вход каждого из которых соединен с выходным каналом 7 контрольного сигнала ЭВМ 8, формируемого, например, с помощью одновибратора 9, а второй вход - с каналом вывода дискретных сигналов модуля 10„ Каналы 2 строк подключены к модулю 11, а каналы 12 задания знака - к модулю 13 (разбиение модулей вывода дискретных сигналов ЭВМ на три части 10, 11 и 13 выполнено условно). Блок k формирования командных сигналов (смо фиго 2) содержит интегратор k узел задания знака 15 и узел включения интегратора 16 Выходы узг лов 15 и 16 соединены со входами интегратора Узел задания знака 15 и узел включения интегратора связаны каналом 3 с выходом элемента И 6 Блок k может быть реализован на различной аппаратурной .базе (пневматической, электрической и др„). В качестве примера на фиг„ 3 показан вариант построения блока Ц на пневматических элементах. Интегратор включает дроссель 17, емкость 18, усилитель 19 повторители со сдвигом 20 и 21 с Узел задания знака реализован в виде реле 22, управляемого через эл ктропневматический преобразовтель 23,а узел включения интегратора - в виде клапана 2k, управляемого через электропневмопреобразователь 25. Устройство работает следующим образомЭВМ формирует с заданной частотой команды управления (сигнал КУ - на фиг. и). При этом на выходе одновибратора 9 формируется контрольный сигнал (сигнал к/с - на фиг. 4),который держится в течение времени Т„ Еслиподавать сигналы КУ чаще, чем время стробсигнала ,то на выход.е одновибратора 9 устанавливается постоянный сигнал к/с„ При наличии сигнала к/с сигналы знака, столбца и строки включают интегратор 1 в заданном блоке . При этом, если подан сигнал знака 1, то интегратор 1 начинает увеличивать выходной сигнал, если знаковый си1- нал отсутствует (равен О ), то выходной сигнал интегратора l4 уменьшаетсяПри выключенном состоянии узла 16 интегратор запоминает выходной сигнал. Подача знакового сигнала без подачи сигнала строки и столбца не влияет на выходной сигнал интегратора .
Работа устройства проиллюстрирована диаграммой фиг, i.
В момент времени 1 при появлении сигнала КУ формируются cj irHahbt к/с, строки, столбцы Сигнал столбца прох дит на выход элемента И и совместно с сигналом строки и сигналом знака (он равен о) включает интегратор, выходной сигнал которого начинает уменьшаться. Уменьшение идет до момента времени III, когда сигнал столца исчезает. Точно так же при исчезновении сигнала строки (УЦ-УШ) интегратор прекращает работать. При останове ЭВМ, когда выходные сигналы модуля 8 остаются во включенном .состоянии, а команда управления не подтверждается (это происходит между X и XI), то происходит исчезновени сигнала к/с (между Х и Х) иинтегретрр отключается,
В устройстве возможно управление блоками k одновременно во всех строках матрицы 1, стоящими в разных столбцах Это повышает быстродействие устройства. Используя электронный или пневматический интеграторы, можно сделать устройство с электрическими, пневматическими выходами или их комбинацией в нужном соотношениио
Конкретная схема модуля вывода дидискретной информации и одновибратора, выдающего стробсигнал (к/с), зависит от применяемых конструкций выходных блоков ЗВМ.
В связи с тем, что ЭВМ может учесть индивидуальные характерис ики интеграторов, в устройстве могут быть применены нелинейные, простые по конструкции интеграторы.
Эффективность изобретения определяется повышением надежности системг управления, построенных с применением предлагаемого устройства
Формула изобретения
1о Устройство многоканального управления, содержащее ЭВМ, коммутирую11;ую матрицу, на пересечении канало строк и столбцов которой установлены блоки формирования командных сигналов каждый из которых выполнен в виде интегратора, узла задания знака и узла включения интегратора, причем выходы узлов задания знака и включения интегратора соединены с входами интегратора, выходы интеграторов подключены к выходным каналам устройства, каналы вывода дискретных управляющих сигналов ЭВМ соединены через каналы строк коммутирующей матрицы с входами узлов задания знака и с первыми входами узлов включения интеграторов, отличающееся тем, что, с целью повышения надежности, устройство снабжено элементами И, первые входы которых соединены с выходным каналом контрольного сигнала ЭВМ, вторые входы - с соответствующими .каналами вывода дискретных управляющих сигналов ЭВМ, а выходы элементов И через каналы столбцов коммутирующей матрицы подключены к вторым входам узлов включения интеграторов,
2о Устройство по п. 1, отличающееся тем, 4TOj узлы задания знака выполнены с дополнительными вторыми входами, подключенными через каналы столбцов коммутирующей матрицы.к выходам элементов И.
Источники информации, принятые во внимание при экспертизе
14 Авторское свидетельство СССР {Г612205, кло G 05 В 11/13, 197.
2. Авторское свидетельство СССР bf , кл. Н 03 К 17/ftit, 1970 (прототип)о
Пfff I //

| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный регулятор | 1980 |
|
SU1032425A1 |
| Устройство управления объектами | 1979 |
|
SU873246A1 |
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
| Устройство для ввода дискретных сигналов в электронную вычислительную машину | 1990 |
|
SU1791808A1 |
| Устройство для ввода-вывода аналоговых сигналов | 1981 |
|
SU1015369A1 |
| Устройство для сопряжения группы ЭВМ с группой абонентов | 1988 |
|
SU1508221A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1984 |
|
SU1256084A1 |
| Электропневматическое управляющее устройство | 1979 |
|
SU954937A1 |
| Программное устройство для управления @ -водоподготовительными фильтрами | 1982 |
|
SU1136111A1 |
У
h
-11
. V
«-.JJ
11
.л
Фиг.1
ss ч|
ч
«I
