(54) ВИБРОЛОТОК

| название | год | авторы | номер документа |
|---|---|---|---|
| Вибролоток | 1980 |
|
SU948613A1 |
| Вибрационное загрузочное устройство | 1980 |
|
SU1046065A1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ СУХИМ СПОСОБОМ ТВЕРДЫХ СЫПУЧИХ МАТЕРИАЛОВ | 2001 |
|
RU2191640C1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ И ОРИЕНТАЦИИ ИЗДЕЛИЙ | 1991 |
|
RU2015092C1 |
| Способ проведения горных выработок и устройство для его осуществления | 1979 |
|
SU861617A1 |
| Способ разделения потока конических деталей и устройство для его осуществления | 1986 |
|
SU1405898A1 |
| Устройство для поштучной подачи изделий | 1977 |
|
SU742269A1 |
| Двигатель внутреннего сгорания "НОРМАС" N 38 | 2020 |
|
RU2752737C1 |
| СПОСОБ ОЦЕНКИ ИЗНОСА ПОКРЫТИЙ И КАЧЕСТВА ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ МАШИН В РАЗЛИЧНЫХ СРЕДАХ | 2005 |
|
RU2308701C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2198330C2 |

1
Изобретение относится к автоматизации технологических процессов в машиностроении и может найти применение, на. пример, в подшипниковой промыш пени ости при сборке шарикоподшипников.
Известе вибропоток дпя транспортировки сферических изделий на высоту, содержащий профи пьный трапецеидальный поток и вибропривод С- 1Известный вибропоток обеспечивает транспортировку изделий разных типоразмеров, но имеет недостаточную производительность.
Целью изобретения является повышение производительности устройства.
Цель достигается за счет того, что боковые стенки профильного лотка выполнены с наклоном в одну сторону, причем угол наклона одной боковой стенки превышает угол наклона другой стенки.
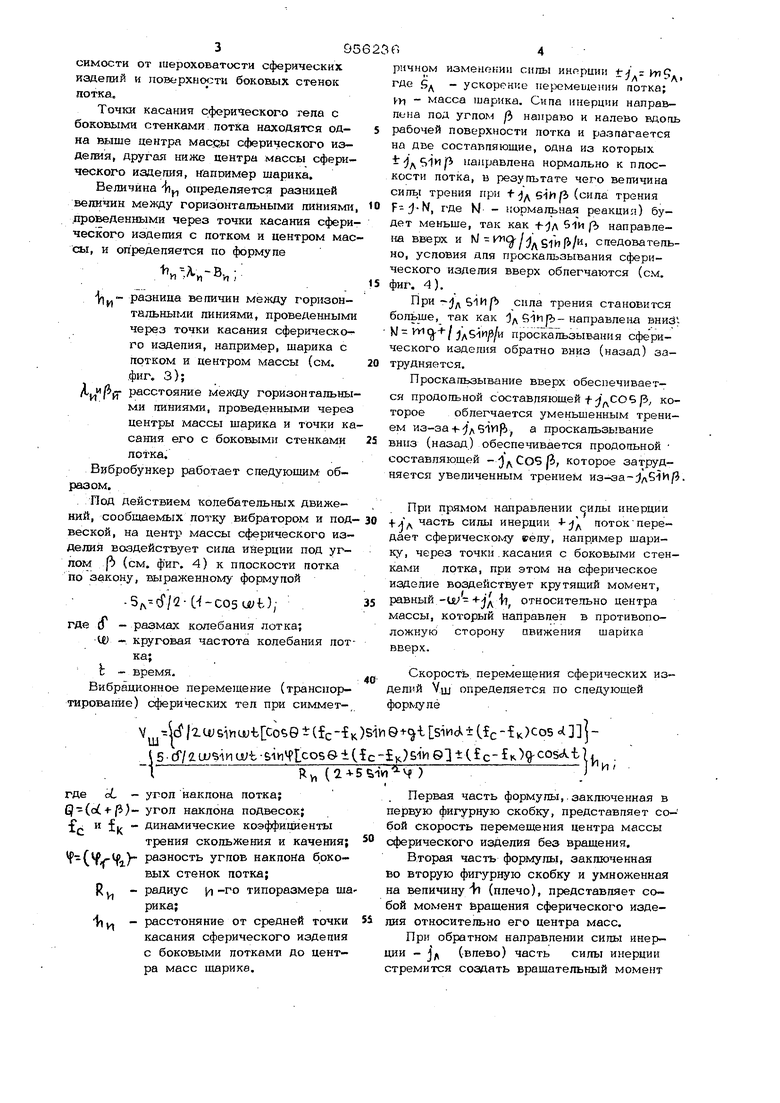
На фиг. 1 показан вибролоток; на фиг. 2 - вид А на фиг. 1; на фиг. 3 схема построения и рабочие параметры потка; на фиг. 4 - схема распределения
СИЛ при перемещении сферического изделия по вибрируюшему лотку.
Вибролоток состоит из основания 1, на котором установлен электромагнитный вибратор 2, расположенный под лоткодержателем 3, к котороь у жестко крепится лоток 4. Лоток 4 расположен под углом с 0-8° к горизонтальной плоскости. Лоткодержатепь 3 крепитс;а к основанию 1 с помошью наклонных подве10сок (пружин) 5, которые расположены под углом &-/ci.-tfi равным 12-28 , относительно вертикальной плоскости. Лоток 4 выполнен из условия касания сферического изделия в двух точках.
15
Построение боковых стенок лотка начинают с задания R наименьшего шарика, углов f и Vo, наклона боковых стенок лотка (см. фиг. 3).
20
Экспериментально установлено, что оптимальные углы наклона 40, V 4°, но эти углы меняются в пределах % -, (7 40- 21°), f,г (1-7 )в зави395симости от шероховатости сферических иадегшй и поверхно ;ти боковых стенок потка. Точки касания сферического тепа с боковыми стенками потка находятся одна выше центра масйы сферического иэделмя, другая ниже центра массы сферического иадепия, напоимер шарика. Величина 4i определяется разницей величин между горизонтальными лийиямн .проведенными через точки касания сфери ческого издегшя с лотком и центром мас сы, и опре;депяется по формуле К - и-Ви; и разница величин между горизонтальными линиями, проведенными через точки касания сферкгческо го изделия, например, шарика с лотком и центром массы (см. фиг. 3); ffT расстояние горизонтальны ми линиями, проведенными через центры массы шарика и точки ка сания его с боковыми стенками лотка. Вибробункер работает следующим образом. Под действием колебательных движений, сообщаемых лотку вибратором и под веской, на центр массы сферического изделия воздействует сила ийерции под углом 1 (см, фиг, 4) к плоскости лотка по закону, выраженному формулой -S --d/2-C -C05 jyt); где d - размах колебания лотка; Л) - круговая частота колебания лот ка; Ь время. Вибрационное перемещение (транспортирование) сферических тел при симмету 4(|ги;51ишЪ со е t(fc-€K)si %- 5iMdtCfc-fK)co5 (5/ ш уи;Ъ-51иЦ 1со5в±С{с- к))9-со5 -Ьи 1Ry, ()J
угол наклона лотка;
угол наклона подвесок;
динамические коэффициенты
трения скольжения и качения;
разность углов наклона боковых стенок потка; радиус /) -го типоразмера шарика;
расстоняние от средней точки касания сферического изделия с боковыми лотками до центра масс шарике.
Первая часть формулы,.заключенная в первую фигурную скобку, представляет со бой скорость перемещения центра массы сферического изделия без вращения.
Вторая часть формуль, заключенная во вторую фигурную скобку и умноженная на величинуИ (плечо), представляет собой момент Вращения сферического изделия относительно его центра масс.
При обратном направлении силы инерции - д (влево) часть силы инерции стремится создать вращательный момент 0 рнчном изменении силы инррции tj hiP где 5д - ускорение перемещении потка; t/vi - масса шарика. Сила инерции направлена под углом ft направо и налево вдопь рабочей поверхности лотка и разпагается на две составляющие, одна из которых на 1равлена нормально к плоскости потка, в результате чего величина сипь трения при t д (сила трения , где N - кормальная реакция) будет меньше, так как 51И fb направлена вверх и , следовательно, условия для проскальзывания сферического изделия вверх облегчаются (см. фиг. 4). При ) сила трения становится больше, так как д Й1 иfb-направлена вниЗ N д-+/jyyS-in /H проскальзывания сферического изделия обратно вниз (назад) затрудняется. Проскальзывание вверх обеспечивается продольной составляющей f- COG/3, которое облегчается уменьшенным трением из-за-ь д81У1р, а проскальзывание вниз (назад) обеспечивается продольной составляющей (, которое затрудняется увеличенным трением из-за : /х51И/. При прямом направлении силы инерции f/д часть силы инерции 4-. потокпередает cфepичecкofv y епу, например шарику, через точки . касания с боковыми стенками лотка, при этом на сферическое изделие воздействует крутяший момент, равный-ш-+ д IT, относительно центра массы, который направлен в противоположную сторону авижения шарика вверх. Скорость перемещения сферических изделий УШ определяется по следующей формуле относительно центра потка, ноправпечный по часовой стрспке и равный -t-dj- . Но величина этого момента меньше чем -, потому, - что в этот момент составляющей нормапьной реакиии- д Sin R направпена Bmia, cooTBeTCTBeHfio сипа трения больше, а при предлагаемой кгашообразной форме потка происходит частичное заклинивание шарика с лотком, в результате чего- стремится к нулю. Частичное заклинивание и величина силы трения не дают возможности изме-няться угповой скорости , т.е. на каждом периоде величина -w остается постоянной, D предлагаемой форме лотка при равных значениях рабочих параметров зна чение первой части формугш ш остается одинаковой. Значение второй части формулы LU зависит от величины плеча 4) а эта величина в предлагаемой форме лотка в несколько раз меньше (по сравнению с предыдущим и формами лотка), соответствекно и значение второй части формулы Ш уменьшается в несколько раз. Следовательно, скорость перемещения /щ. увеличивается, соответстве но увеличивается производительность вибробункера. Предлагаемое изобретение дает возможность упорядоченной транспортировки сферических теп и позволяет(Например, автоматизировать технологический процесс сборки шарикоподшипников. 1ормула изобретения Вибропоток для транспортировки сферических изделий, содержаший профильный поток и вибропривод, отличающийся тем, что, с целью повышения производительности устройства, боковые стенки профильного лотка выполнены с наклоном в одну сторону, причем угол наклона одной боковой стенки превышает угол наклона дпугой боковой стенки. Источники информации, принятью во внимание при экспертиз 1. Бобров В, П. Проектирование загрузочно-транспортных устройств к станкам и автоматическим линиям. М., Машиностроение, 1964, с. 33 (прототип).
+6}
ф1/г.
