(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА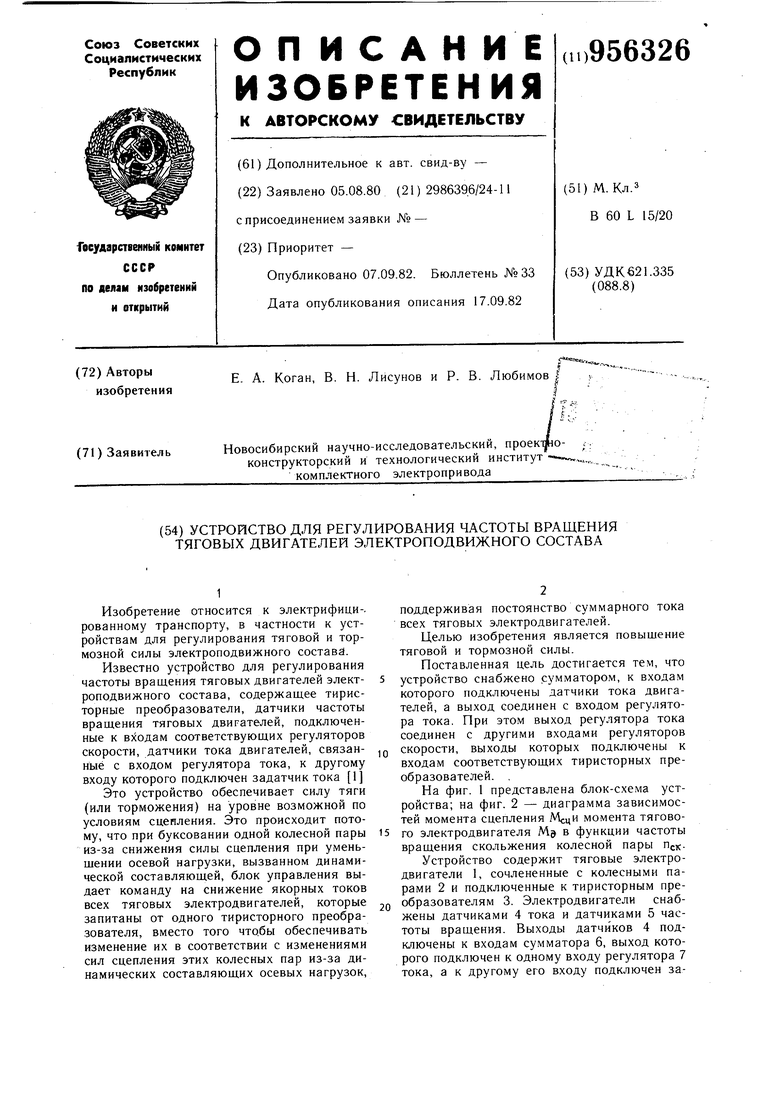

1
Изобретение относится к электрифици-. рованному транспорту, в частности к устройствам для регулирования тяговой и тормозной силы электроподвижного состава.
Известно устройство для регулирования частоты вращения тяговых двигателей электроподвижного состава, содержащее тиристорные преобразователи, датчики частоты вращения тяговых двигателей, подключенные к входам соответствующих регуляторов скорости, датчики тока двигателей, связанные с входом регулятора тока, к другому входу которого подключен задатчик тока 1
Это устройство обеспечивает силу тяги (или торможения) на уровне возможной по условиям сценлекия. Это происходит потому, что при буксовании одной колесной пары из-за снижения силы сцепления при уменьщении осевой нагрузки, вызванном динамической составляющей, блок управления выдает команду на снижение якорных токов всех тяговых электродвигателей, которые запитаны от одного тиристорного преобразователя, вместо того чтобы обеспечивать изменение их в соответствии с изменениями сил сцепления этих колесных пар из-за динамических составляющих осевых нагрузок.
поддерживая постоянство суммарного тока всех тяговых электродвигателей.
Целью изобретения является повыщение тяговой и тормозной силы.
Поставленная цель достигается тем, что
5 устройство снабжено сумматором, к входам которого подключены датчики тока двигателей, а выход соединен с входом регулятора тока. При этом выход регулятора тока соединен с другими входами регуляторов
,Q скорости, выходы которых подключены к входам соответствующих тиристорных преобразователей.
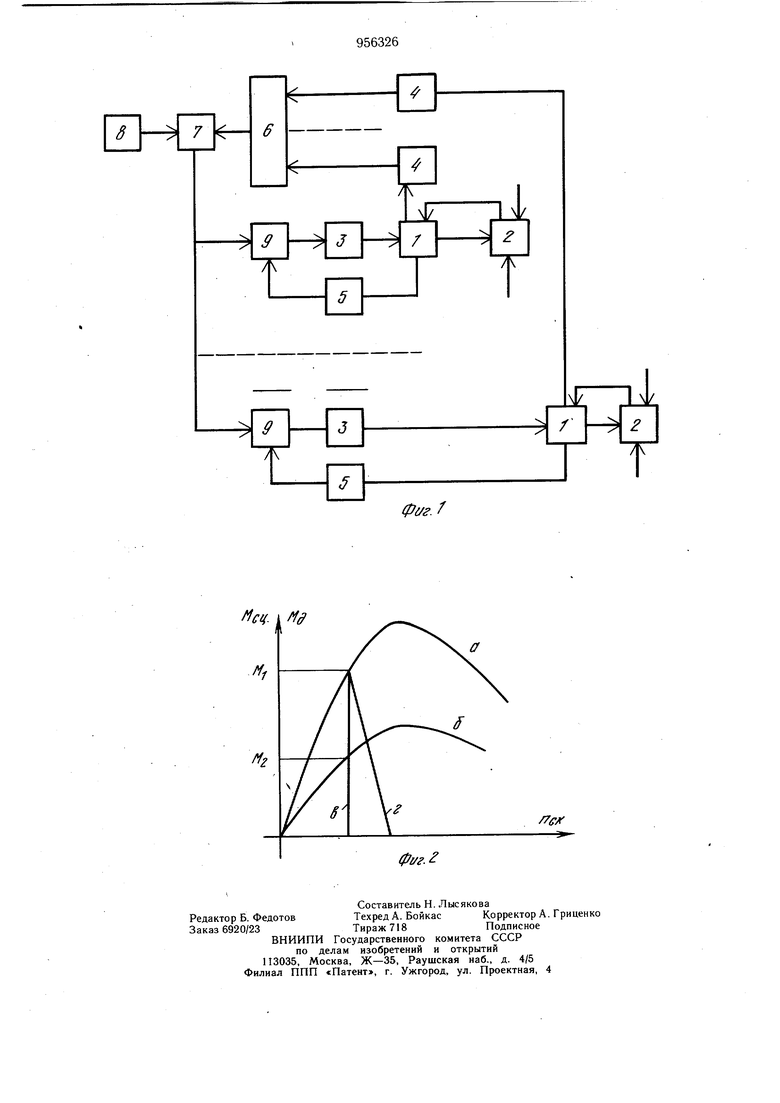
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - диаграмма зависимостей момента сцепления момента тягово15 го электродвигателя М в функции частоты вращения скольжения колесной пары Пс Устройство содержит тяговые электродвигатели 1, сочлененные с колесными парами 2 и подключенные к тиристорным пре2Q образователям 3. Электродвигатели снабжены датчиками 4 тока и датчиками 5 частоты вращения. Выходы датчиков 4 подключены к входам сумматора 6, выход которого подключен к одному входу регулятора 7 тока, а к другому его входу подключен задатчик 8 тока. Выход регулятора 7 тока подключен к входам регуляторов 9 скорости, к другим входам которых подключены датчики 5 частоты вращения, а к выходам - входы соответствующих тиристорных преобразователей 3.
На диаграмме изображены кривые «а и «б зависимостей моментов сцепления колесных пар, соответствующих максимальному и минимальному давлению на ось, от частоты вращения скольжения, и кривые «в и «г зависимостей момента двигателя от частоты вращения скольжения колесной пары соответственно при бесконечной жесткости характеристики и реальной.
Устройство работает следующим образом.
При пуске задатчик 8 тока выдает задание суммарного якорного тока тяговых двигателей. В регуляторе 7 тока из задания вычитывается величина действительного суммарного якорного тока якорей двигателей. Так как в первый момент токи двигателей равны нулю, на вход регуляторов 9 скорости поступает полный сигнал задания. В регуляторе из сигнала задания вычитается сигнал обратной связи по скорости. Так как в первый момент скорость колеса равна. нулю, весь сигнал поступает на вход тиристорного преобразователя 3. Тиристорный преобразователь, полностью открывшись, выдает максимальное напряжение на зажимы якоря двигателя 1. Это вызывает форсированное нарастание тока якоря. Сигналы с датчиков 4 токов поступают на вход сумматора 6. Сигнал с выхода сумматора поступает на вход регулятора 7 тока. Таким образом работает контур обратной связи по суммарному току якорей двигателей. Работа этого контура обеспечивает поддержание суммарного тока на уровне заданного.
Протекание тока по якорю двигателя 1 вызывает появление момента двигателя. Двигатель начинает разгоняться. После того как момент двигателя станет равным моменту сопротивления, разгон двигателя прекратится.
Сигнал с датчика 5 частоты вращения двигателя поступает на вход регулятора 9 скорости. Таким образом работает контур обратной связи по частоте вращения.
Работа этого контура обеспечивает поддержание частоты вращения на уровне задания, поступающего от регулятора 7 на вход регулятора 9.
Теперь, если вследствие колебаний давления колесной пары на рельс характеристика «а (см. фиг. 2) перейдет в характеристику «б, момент двигателя изменится от MI до Мг. Пропорционально изменится и ток якоря двигателя. Таким образом ток якоря двигателя будет колебаться вокруг среднего значения, однако вследствие постоянства суммарного давления колес на рельс сумма токов якорей двигателей будет
оставаться постоянной. Если же по какойлибо причине, например, вследствие изменения физического состояния контактов колесо - рельс, значения суммарного тока отклонится от заданного, это изменит сигнал
ощибки суммарного тока на выходе регулятора 7, а следовательно, и сигнал задания скорости всем колесным парам. Скорости колесных пар изменятся так, чтобы ликвидировать отклонение суммарного тока от заданного. Предлагаемое нами устройство позволяет по сравнению с известным иметь значительное увеличение реализуемой силы тяги при сохранении всех других показателей без изменения.
По данным Омского института инженеров
5 транспорта динамическая составляющая осевой нагрузки находится в пределах ±20% от постоянной составляющей, зависящей от веса электровоза. В таких же пределах колеблются максимумы кривых сцепления колесных пар. В известном устройстве система защиты от буксования построена на принципе удержания тяги электровоза на уровне, исключающем возможность буксования отдельных колесных пар, т.е. на 20% ниже тяги, определяемой весом электровоза. При использовании предлагаемого изобретения, вследствие слежения тяги каждой колесной пары за колебаниями сил сцепления может быть реализована сила сцепления, определяемая сцепным весом, т.е. на 20% выще базового образца. Таким образом, 0 если за единицу принять реализуемую силу тяги, обеспечиваемую устройством регулирования силы тяги по известному устройству, то сила тяги, реализуемая предлагаемым устройством, может быть оценена величиной 1,2.
Формула изобретения Устройство для регулирования частоты вращения тяговых двигателей электроподвижного состава, содержащее тиристорные преобразователи, датчики частоты вращения
0 тяговых двигателей, подключенные к одним входам соответствующих регуляторов скорости, датчики тока двигателей, связанные с одним входом регулятора тока, к друго.му входу которого подключен задатчик тока, отличающееся тем, что, с целью повышения тяговой и тормозной силы, оно снабжено сум.матором, к входам которого подключены датчики тока двигателей, а выход соединен с другим входом регулятора тока, при этом выход регулятора тока соединен с другими
50 входами, регуляторов скорости, выходы которых подключены к входам соответствующих тиристорных преобразователей.
Источники информации, принятые во внимание при экспертизе 1. Жулев О. Н. и др. Электровоз SV1-3000,
55 «Электротехническая промышленность. Серия «Тяговое и подъемно-транспортное электрооборудование, № 6(39), Москва, 1975, с. 6-10.
ф1/г.
