Изобретение относится к железнодорожному транспорту, в частности к уст ройствам для регулирования частоты вра щения тягчдаых двигателей -электропоДвиж ногр состава, Известно устройство автоматического регулирования частоты вращения тяговых двигателей электроподвижиого состава, содержащее тиристорные преобразователи датчики тока, подключенные к входам сумматора, выход которого соединен с. одним-из входов регулятора суммарюгх тока, к другому входу которого подключен задатчик суммарного тока, и датчик частоты вращения тяговых двигателей, подключенные к входам соответствующих регуляторов частоты вращения, соединенных своими выходами с тиристорными преобразователями 1, Недостаток указанного устройства заключается в том, что максимальное И1 пользование сыепных свойств локомотшза может быть только при равенстве диамет ров всех колес, так как регуляторы час- тоть обеспечивают равенство частоты вращения двигателей и при различных диаметрах колесных пар скорости скольжения их будут различными и, следовате но, сцепные свойства будут недоиспользованы. Целью изобретения является улучщени тяговых свойств электроподвижного соста ва.Поставленная цель достигается тем, что устройство для автоматического регулирования частоты вращения тяговых двигателей электроподвижного состава, содержащее тиристорные преобразователи датчик тока, подключенные к входам сум матора, выход которого соединен с одним из входов регулятора суммарного тока, к другому входу которого подключены задатчики суммарного тока и датчики частоты вращения тяговых двигателей, подключенные к входам соответствующих регуляторов частоты вращения, соединенных своими выходами с тиристорными преобразователями.,, снабжено задатчика- ми токов двигателей, блоками сравнения, формирователями среднего значения тока и дополнительными сумматорами, при этом задатчики токов подключены к выходу задатчика суммарного тока и соединены выходами с одними из входов блоков сравнения, к другим входам которых подключены датчики токов, а к выходам входы формирователей среднего значения тока, соединенных выходами с входами соответствующих дополнительных сумматоров, к другим входам которых подклк чен выход регулятора суммарного тока, а к выходам соответствующие регуляторы частоты вращения. На чертеже представлена электрическая блок-схема предлагаемого устройства. Устройство состоит из тиристорных преобразователей 1, подключенных к соответствующим тяговым электродвигателям 2. Датчики 3 частоты вращения подключены к одним из входов регуляторов 4 Частоты вращения. Датчики 5 токов подключены к входам сумматора 6 и одним из входов блоков 7 сравнения. Выход сумматора 6 соединен с одним из . входов регулятора 8 суммарного тока, к . другому ВХОДУ которого подключен задатчик 9 суммарного тока, соединенный также с входами задатчиков 10 токов двигателей. Выходы задатчиков 10 соединены с другими входами блоков 7 срав.. нения, соединенные своими выходами с входами формирователей 11 среднего значения тока. Выход регулятора 8 суммарного тока подключен к одним из входов дополнительных сумматоров 12, к другим входам которых подключены выходы фо1 мирователей 11. Выходы дополнительных сумматоров 12 подключены к входам рогуляторов 4 частоты вращения. Задатчики 10 токов двигателей выпол- няют функции деления суммарного тока с коэффициентами деления 1:1,22:1,22:1,35 соответственно для первой второй,треть ей и четвертой тележек от головной части локомотива пропорционально отнощеHtoo коэффициентов сцепления колесных пар указанных тележек. Устройство работает следующщд о&разом. При пуске задатчик 9 суммарного тока выдает сигнал задания токов всех тяговых двигателей. Сигнал с задатчика 9 поступает на вход каждого задатчика 10 токов двигателей, с выходов которых поступает на один из входов соответствующего блока 7 сравнения. Так как на его другом входе сигнал равен нулю от датчика 5 тока соответствующего двигателя, то на вход формирователи 11 поступает полный сигнал. На выходе формирователя формируется сигнал, пропорциональный среднему значению тока за предыдущий период измерения, и поскольку до этого он был равен нутпр, то в первый момент и за весь первый период измерения на его выходе сигнал будет равен нулю. Сигнал с задатчика 9 поступает на вход регулятора 8 суммарного тока. Поскольку на его друг входе сигнал равен нулю, то с выходов сумматоров 12 поступает полный по величине сигнал, явл1иопшйся сигналсы задашш для регуляторов 4 чао тоты вращения. Так как в первый момеш частота вращения равна нулю, весь сиг нал 1юступает на вход тиристорного преобразователь, который, полностью открывшись, подает полное напряжение на тяговые электродвигатели. Это вызывает форсированное нарастание токов двигателя и ведет к разгону двигателей. Сигналы с датчиков 5 поступают на сумматор 6, с выхода которого поступают на вход регулятора 8 суммарного тока, который осуществляет изменение задающего сиг нала, для регулятора 4. Сигналы с дат- 4WK.O& 3 частоты вращения поступают на вход регулятора 4, которые обеспечивают большую жесткость поддержания частоты вращения на уровне задания от рег лятора 8, При появлении динамической составля ющей давления колеса на рельс юменитс момент сцепления и, как следствие этого момент и ток двигателя. Таким образом при колебаниях давления с той же часто той будет колебаться и гак двигателя. Если суммарное давление колес на рельс постоянно, то колебания тока будут совершаться вокруг постоян1|рго среднего значения. При колебаниях суммарного давления илипри изменениях физинеско1х состояния контакта колесо-рельс значения суммарного тока отклонится от заданногх). Это изменит сигнал ошибки суммарного тока на выходе регутштора 8, следовательно, и сигнал задания скорости всем колесным парам. Скорости колесных пар тззменяются так, чтобы ликвидировать возникшие отклонения суммарного тока ;от заданного. Вследствие разброса диаметров коесных пар имеет место разброс скороотей скольжения, что вызывает разброс значений токов двигателей. В блоке 7 сравнения будет происходить вычитание сигнала обратной св51зи, поступаюшего от. соответствуюшего датчика 5 тока, из эталонного значения тока, поступающего с задатчика 1О. Сигнал ошибки поступит с блока 7 на вход фо1 мирователя 11, которлй сформирует среднее за время измерения значение этой ошибки. В результате суммирования сигналов в сумматоре 12 ва вход регулятора 4 частоты вращения поступает, сигнала задания с регулятора 8, корректирующий сигнал (положительный или отрицательный в зависимости от знака ошибки блока 7), что приводит cpejtH-. нее значение якорного тока в соответствие с сигналом задания задатчиком 10. Коэффициенты передачи задатчиков 10 выбирают такими, чтобы их сумма равнялась единице. Введение указанных задатчиков позволяет поддерживать задаваемое соотношение токов отдельных тяг(жых двигателей при изменении задания суммарногчэ тока, и тем самым, повысить точность регулирования частоты вращения тяговых двигателей в зависимости от реализуемых коэффициентов сцепления соответствующих колесных пар локомотива. Предлагаемое устройство позволяет до сравнению с базовым объектом (за который принят электровоз ВЛ-84) иметь увеличенный расчетный коэффициент сцепления: на скорости 6О км/ч в условиях БАМ расчетный коэффициент сцепления электровода ВЛ-84 равен 0,312, а при оборудовании его системы управления предлагаемым устройством он может быть увеличен до 0,393. Ожидаемый годсжой экономический эффект составляет на одно изделие 183 ты с. руб.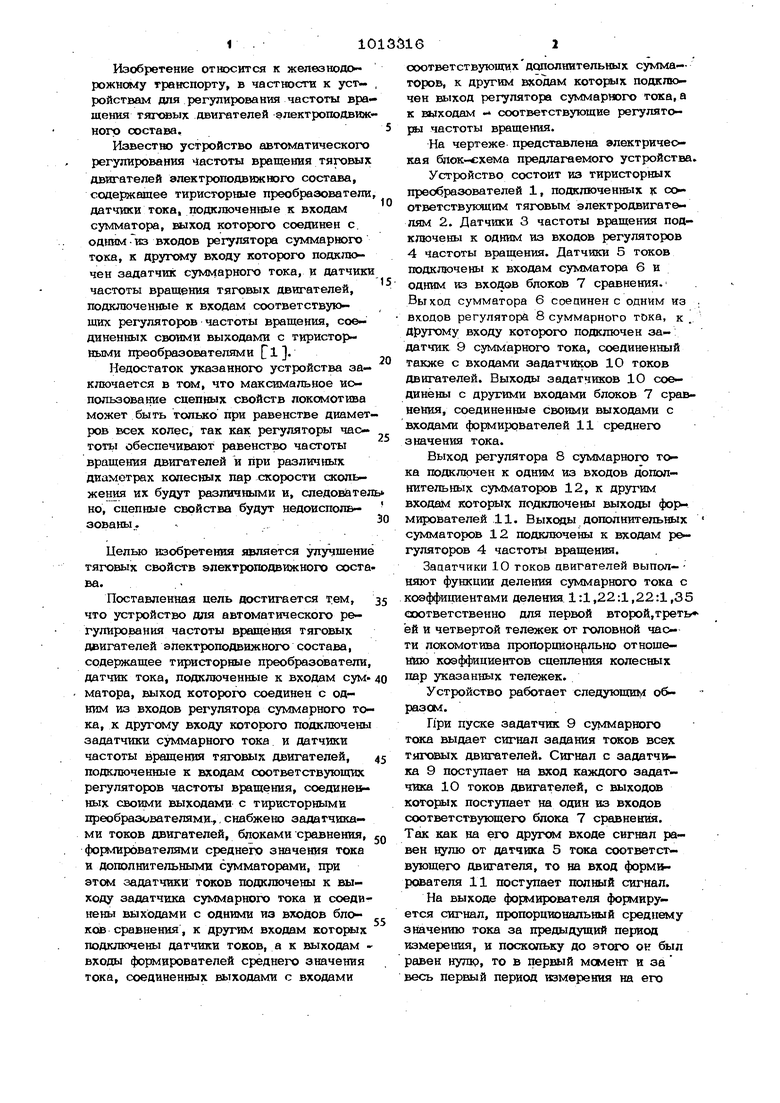
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения тяговых двигателей электроподвижного состава | 1980 |
|
SU956326A1 |
| Устройство для управления электрическим торможением электроподвижного состава переменного тока | 1987 |
|
SU1468790A1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Устройство для управления тяговыми двигателями транспортного средства | 1987 |
|
SU1452722A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2013231C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1990 |
|
RU2034721C1 |
| Способ регулирования сил тяги и торможения электроподвижного состава | 1987 |
|
SU1416346A1 |
| Устройство для защиты от боксования колесных пар электроподвижного состава | 1985 |
|
SU1426869A1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Устройство для регулирования тяговых электродвигателей электроподвижного состава | 1987 |
|
SU1512824A1 |
УСТРОЙСТВО ДЛЯ АВТОМА ТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА, содержащее твристорные прербразователв, датчики тока, подключевные к входам сумматора, выход которого соедивев с . : одшам из входов регулятора суммарного : тока, к азругтлу входу которого пошслючев задатчик суммарного тока, и датшпж частоты вращения тяговых двигателей, ; . подключенвые к входам соответствующих регуляторов частоты вращения,соедине ных своими выходами с тирпсторвыми преобразователями, отличающее с я тем, что, с целью улучшения тяговых свойств электроподвижвого составу, оно скачено задатчиками токов двигате лей, блоками сравнетая, формвфосателями зоачения тока и дополнительными сумматорами, при эюм задатчики тсжов подключены к выходу задаочика суммарвогх) тока и соединены выходами с одними из входов блска сра&нения, к другим входам которых подключены датчики токов, а к выходам -„ входы формирователей среднего значёчзия а тока, соедивевных выходами с входами соответствуюиюх дсшопнительных сумматоров, к другим входам которых noivключен выход регулятора суммарного то кд, а к выходам соответствующие ре гуляторы частоты вращения. СО со ал