(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МЕХАНИЗМОМ ПОДАЧИ ПОГРУЗОЧНОЙ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
1
Изобретение относится к рудничному транспорту, а точнее к механизации погрузки разрыхленной горной массы погрузочными машинами, имеющими рабочий орган непрерывного действия (например, парные нагребающие лапы, парные вращающиеся диски, барабан с выдвижными лопастями верхнего или нижнего захвата и т.п.) и может быть использовано в указанных погрузочных машинах в подземных условиях (щахты, рудники) и на открытых горных разработках, а также на складах сыпучих и кусковых материалов, в порталах, перевалочных базах и т.п.
Известно устройство для управления механизмом подачи погрузочной мащины непрерывного действия, содержащее исполнительный механизм, электродвигатель, измеритель нагрузки и дифференциальный редуктор I.
Известно также устройство для управления механизмом подачи погрузочной машины непрерывного действия, содержащее исполнительный механизм, электродвигатель, измеритель нагрузки, задатчики верхнего и нижнего уровней нагрузки, элементы сравнения, усилители, фильтр и управляемый ключ 2.
Недостатком известных устройств является отсутствие надежного ограничения нагрузки электродвигателя и исполнительного механизма, что снижает их надежность.
Цель изобретения - повышение надежности управления за счет исключения перегрузок в электродвигателе и исполнительном механизме.
Поставленная цель достигается тем, что устройство снабжено генератором тактовых импульсов, квадратором, интегратором, блоком извлечения корня и блоком нелинейности, причем выход генератора тактовых импульсов соединен с одним из входов интегратора, другой вход которого соединен с выходом квадратора, а выход - с одним из входов элемента сравнения, другой вход которого соединен с выходом блока нелинейности, вход которого соединен с электродвигателем, а вход квадратора соединен с выходом измерителя нагрузки.
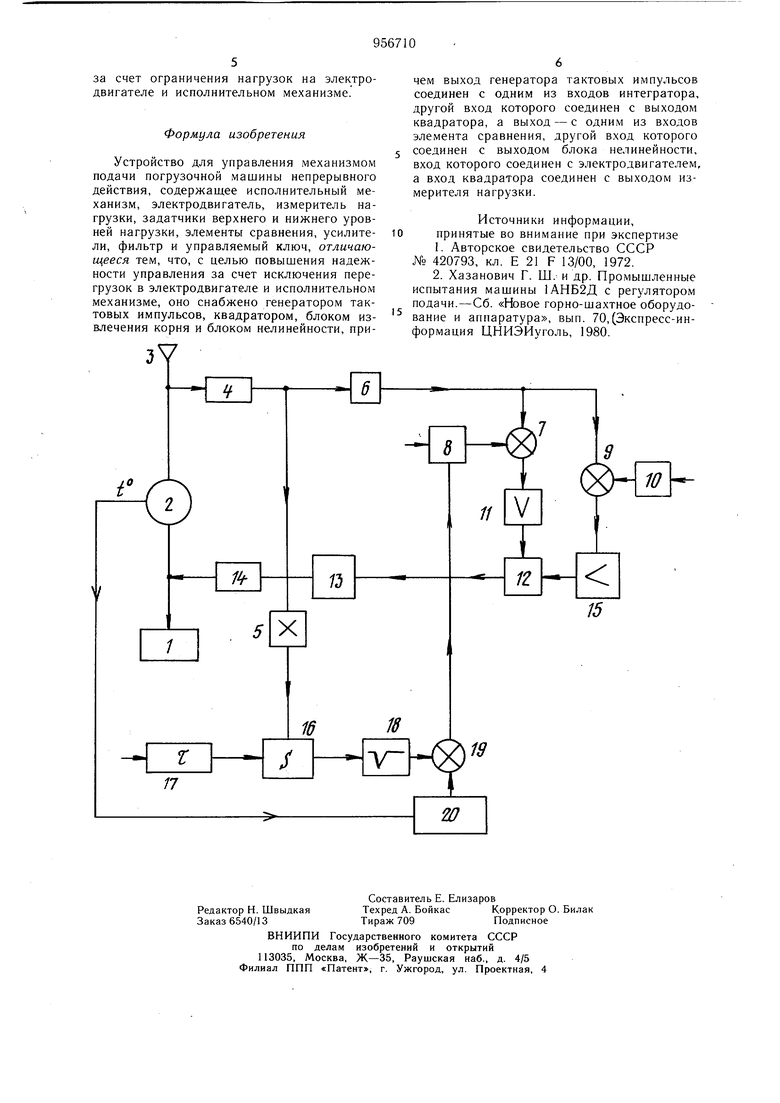
На чертеже изображена функциональная схема устройства.
Устройство состоит из исполнительного органа 1, который приводится в действие от
электродвигателя 2, получающего питание от электросети 3. Мгновенное значение тока электродвигателя измеряется измерителем 4 нагрузки (например, трансформатором тока), сигнал с которого поступает на квадратор 5 через фильтр 6 на элемент 7 сравнения с задатчиком 8 верхнего допустимого уровня и на элемент 9 сравнения с задатчиком 10 нижнего уровня.
Сигнал с элемента 7 сравнения через усилитель 11 и управляемый ключ 12 поступает на катушку 13 электрогидрозолотника управления фрикционом 14. Сигнал с элемента 9 сравнения через усилитель 15 и управляемь й ключ 12 также поступает на катушку 13.
Сигнал после квадратора 5 поступает на интегратор 16, вре.мя интегрирования которого задается генератором 17 тактовых импульсов, а результат поступает на вход блока 12 извлечения квадратного корня, после чего полученный результат поступает на элемент 19 сравнения, где сравнивается с величиной допустимого тока в функции от температурного режима электродвигателя 2 вырабатываемого-блоком 20 нелинейности.
Результат сравнения этих величин после элемента 19 сравнения поступает на задатчик 8 верхнего допустимого уровня.
Устройство работает следуюш.им образом.
После включения погрузочной машины в работу двигатель 2, получая питание из сети 3, приводит в действие исполнительный орган 1, который подается вперед при помош,и механизма подачи, включаемого фрикционом 14, на штабель погружаемого материала, и начинается процесс погрузки. Нагрузка на исполнительном органе 1 определяется при этом формой, состоянием штабеля и видом погружаемого материала, а величина тока, пропорционального этой нагрузке, измеряется измерителем 4 нагрузки и после прохождения фильтра 6 поступает на элемент 7 сравнения, где сравнивается с допустимым значением тока для данного двигателя, установленным на задатчике 8 верхнего допустимого уровня, и на элемент 9 сравнения, где сравнивается с минимальным заданным значением тока, установленным на,задатчике 10 нижнего уровня. Если действительное значение нагрузки оказывается меньше нижнего уровня, то с элементом 9 сравнения подается сигнал, который после усиления усилителем 15 через управляемый ключ 12, находящийся в нормальном замкнутом состоянии, поступает на катушку 13 гидрозолотника и включает фрикцион 14, что приводит к включению подачи машины и внедрению исполнительного органа в штабель погружаемого материала. При этом нагрузка на него возрастает, увеличиваются ток двигателя и сигнал, поступающий на элементы 7 и 9 сравнения. Если величина этого сигнала на элементе 7 сравнения превышает значение величины, установленной на задатчике 8 верхнего уровня, это приводит к появлению сигнала, который после усиления усилителем 11 размыкает управляемый ключ 12, что вызывает обесточивание катушки 13 управления и отключение фрикциона 14 и следовательно подачи
машины на штабель погружаемого материала.
После того, как нагрузка становится ниже верхнего заданного уровня, сигнал на элементе 7 сравнения снижается, и управляемый ключ 12 замыкается, однако включение подачи фрикционом 14 становится возможным только после снижения нагрузки меньше нижнего уровня, заданного на задатчике 10.
В связи с тем, что величина верхнего допустимого уровня нагрузки двигателя зависит от времени его работы, степени загруженности и постоянной времени нагрева, а также учитывая, что двигатель может быть значительно перегружен в начальный период работы, величина верхнего допустимого
° уровня, заданного на задатчике 8, должна изменяться автоматически. Для этого в устройстве величина тока нагрузки возводится в квадрат квадратором 5, затем интегрируется интегратором 16 за время интегрирования I,
5 определяемого генератором 17 тактовых импульсов, а затем из полученной величины извлекается квадратный корень. Полученное среднеквадратическое (эквивалентное) значение тока, пропорциональное тепловым потерям в двигателе за время 1, поступает
затем на элемент 19 сравнения, где сравнивается с допустимым значением тока, определяемым при помощи блока 20 нелинейности, получающего информацию о температурном состоянии электродвигателя 2 от термодатчика. Если действительные тепловые потери в двигателе больше допустимых на выходе элемента 19 сравнения появляется сигнал, который, воздействуя на задатчик 8, снижает верхний допустимый уровень задания нагрузки. Благодаря этому двигатель не перегревается. Если же в результате технологического перегрева в работе погрузочной машины происходит ее остановка и двигатель охлаждается до температуры окружающей среды, то верхний заданный уровень на задатчике 8 повышается в соответствии с температурным состоянием обмоток электродвигателя.
Таким образом, осуществляется поддержание максимальной производительности
0 путем максимальной загрузки приводного электродвигателя исполнительного органа с автоматическим изменением величины верхнего заданного уровня нагрузки в функции действительных тепловых потерь в обмотках электродвигателя на заданный промежуток времени и температурного состояния обмоток электродвигателя.
Этим также обеспечивается повышение надежности работы погрузочной машины
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом подачи погрузочной машины непрерывного действия | 1981 |
|
SU1036861A2 |
| Барабанно-лопастная погрузочная машина | 1981 |
|
SU1041705A1 |
| Способ автоматического управления режимом работы погрузочной машины с барабанно-лопастным исполнительным органом | 1979 |
|
SU866236A1 |
| Устройство автоматического управления горной погрузочной машиной с нагребными лапами | 1978 |
|
SU875028A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ОТ ПЕРЕГРЕВА И УВЛАЖНЕНИЯ | 1992 |
|
RU2033674C1 |
| Способ автоматического управлениягОРНОй МАшиНОй | 1978 |
|
SU810963A1 |
| Устройство для защиты электродвигателя от перегрева и увлажнения | 1988 |
|
SU1683115A1 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
| Устройство аврийного отключения при обрыве или стопорении цепи конвейера | 1979 |
|
SU875029A1 |
| Устройство для тепловой защиты электродвигателя | 1978 |
|
SU714566A1 |
