Изобретение относится к погрузоч-; ным машинам, предназначенным для непрерывной погрузки из штабеля сыпучих и среднекусковых, вязких и склонных к слеживанию и сползанию материа- $ лов. .
Известны бйрабанно-лопастные погрузочные машины, содержащие барабан, внутри которого вмонтированы асинхронный электродвигатель, механическая 10 передача и лопасти. Ротор асинхронного двигателя приводит во вращение через редуктор барабан . В свою очередь, барабан увлекает лопасти, обеспечивая их вращательное движение. За 15 счет эксцентричности осей барабана и лопастей последние совершают возвратно-поступательно.е движение. Включение и выключение асинхронного двигателя, как привода исполнительного 20 органа, производится машинистом вруч-. ную 11 ..
Недостатками этих машин является то, что их режим работы невозможно автоматизировать из-за неприспособ- 25 ленности конструкции к автоматиза-. ции, а нагрузки на исполнительном органе не контролируются.
Известна также б рабанно-лопастная погрузочная машина,содержащая рабочий зо орган, состоящий из коленчато оси с лопастями и барабана, ходовую часть с редуктором, поворотную раму, приемный и перегрузочный конвейеры, асинхронный привод барабана и ходовой части и систему управления с датчиком нагрузки С 2.
Недостатком этой машины является низкая производительность поскольку машина управляется вручную,а контроль за ее работой осуществляется визуально.
Цель изобретения - повышение производительности.
Указанная цель достигается тем, что барабанно-лопастная погрузочная машина, содержащая рабочий орган, состоящий из коленчатой оси с лопастями и барабана, ходовую часть с редуктором, поворотную раму, приемный и перегрузочный конвейеры, асинхронный привод барабана и ходовой- части и систему управления с датчиком нагрузки, снабжена трехпозиционным 55 электромагнитным приводом, реверсив- , ной муфтой и гидроприводом колецчатой оси, включающим нерегулируемый
насос, гидромотор и гидрозолотник, а система управления снабжена датчиком положения коленчатой оси, фикЪатором положения этой оси с двумя заданными уровнями фиксации , электронным ключом, пороговым элементом, логическим блоком и элементом сравнения причем нерегулируемый насос и гидромотор кинематически соединены соответственно с приводом ходов.ой части и коленчатой осью и гидравлически соединены между собой через гидрозолотник, управляющий вход реверсивной муфты соединен с выходом трехпозиционного электромагнитного привода, а входной и выходной валы муфты кинематически соединены через редукторы с ходовой частью и поворотной рамой,, вход фиксатора положений оси соединен с датчиком положения, а вь1ход - с первым входом электронного ключа, второй вход которого соединен с пороговым элементом, а выход - с одним из входов электромагнитного привода , дру гой вход которого соединен с выходом порогового элемента, вход которого соединен с одним из выходов логического блока-,- другой выход которого соединен с гидрозолотником, а вход с выходом элемента сравнения, вычитающий вход которого соединен с датчиком нагрузки.
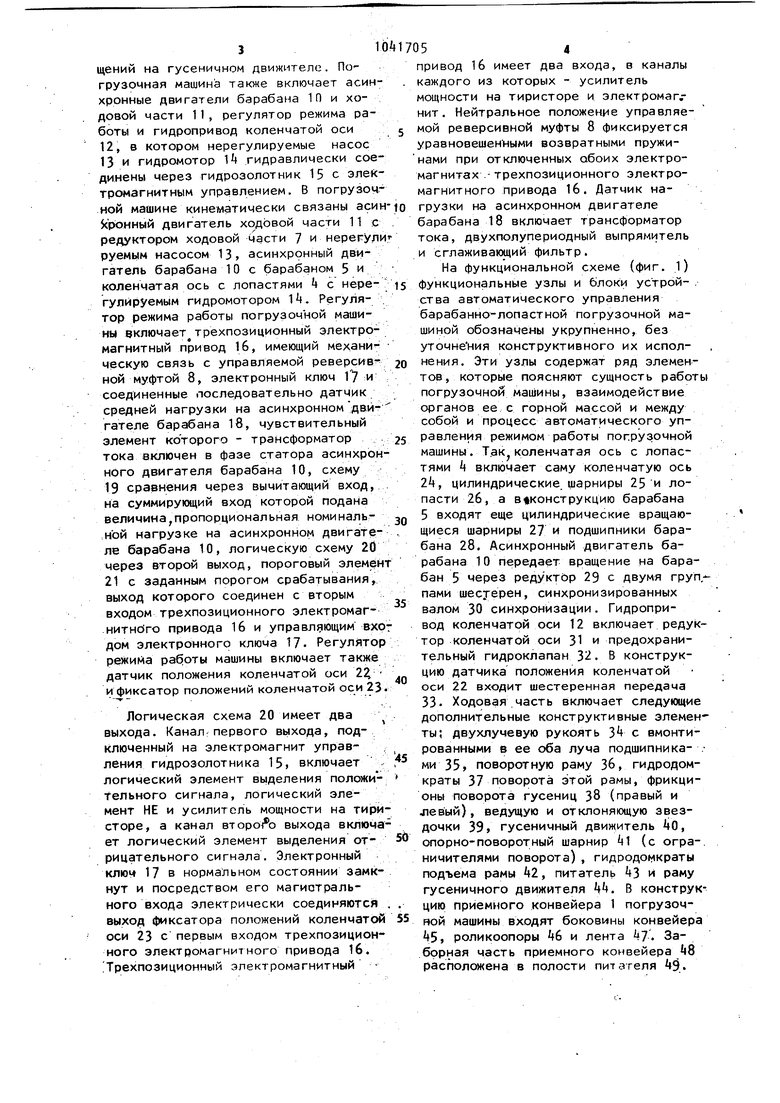
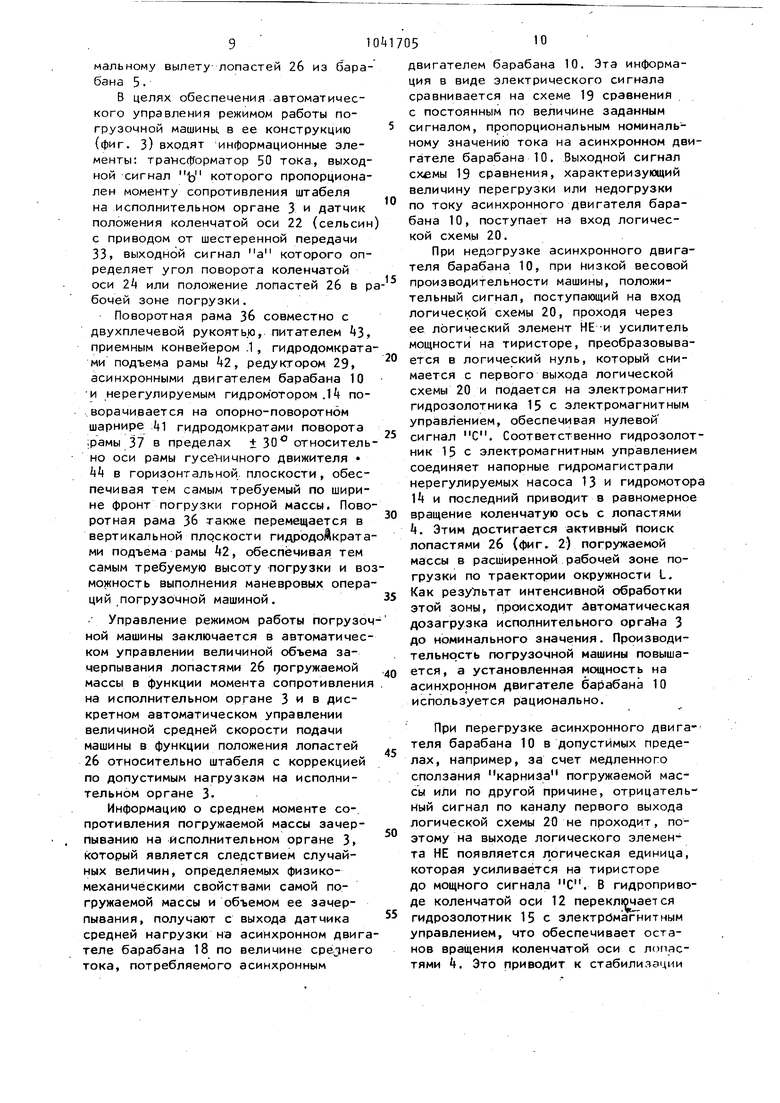
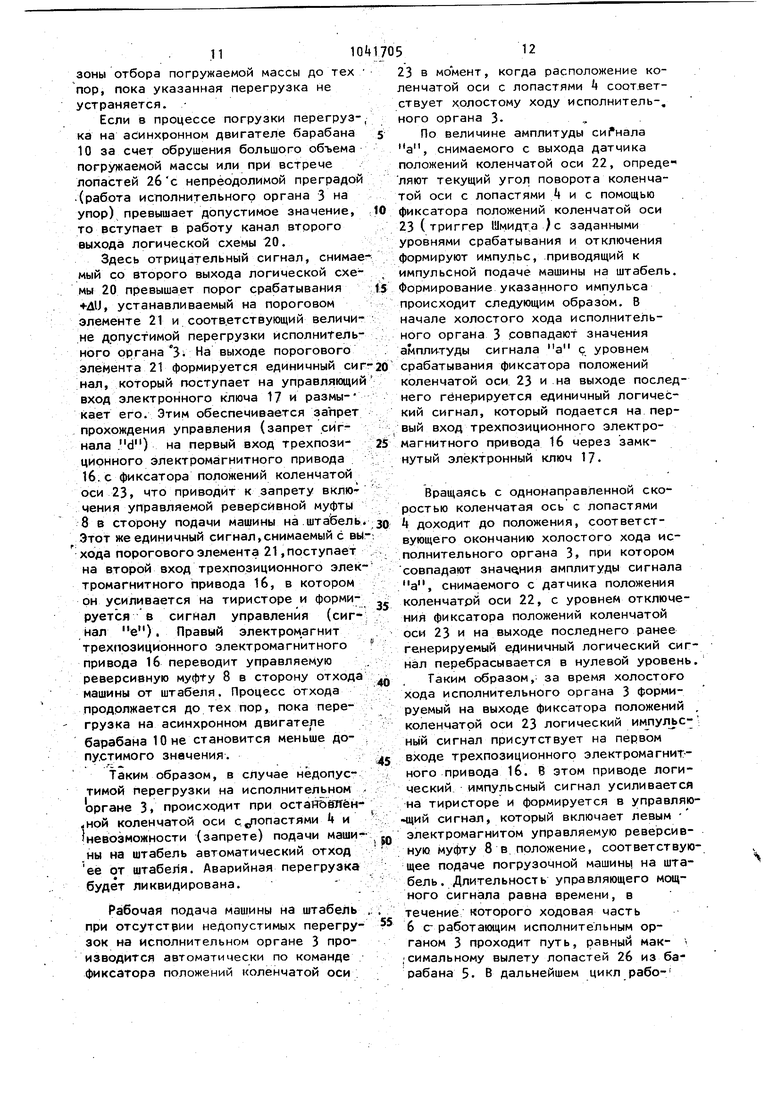
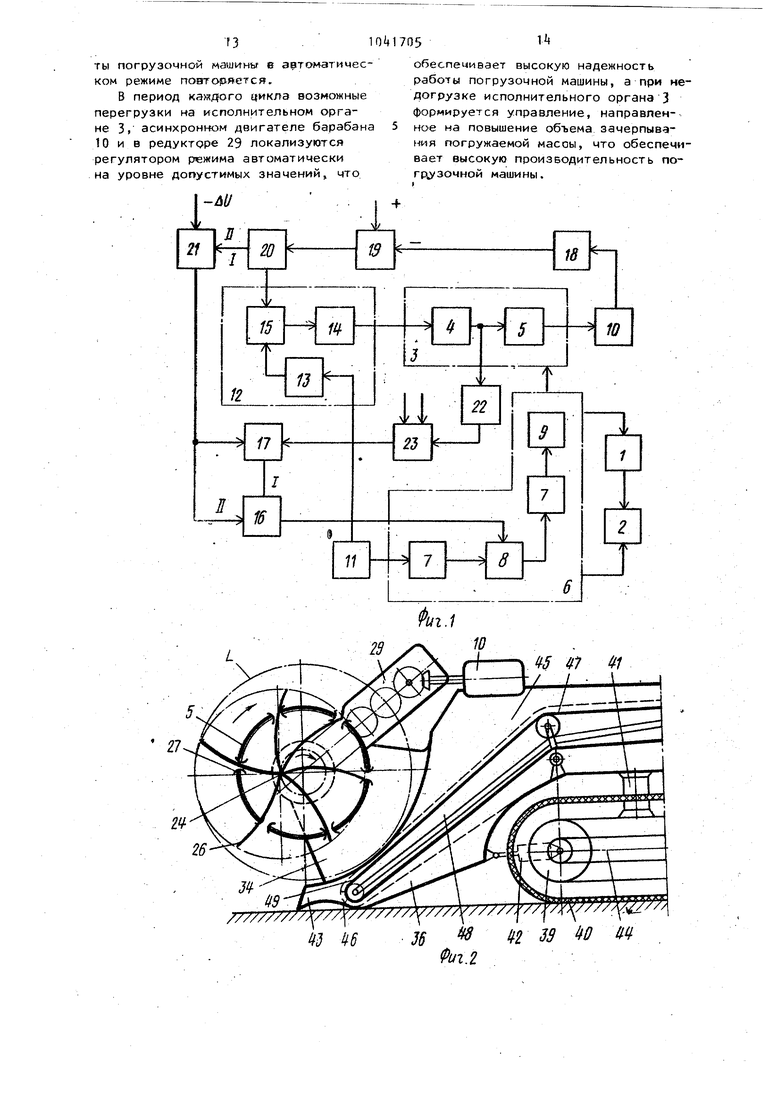
На фиг. 1 представлена функциональная схема устройства автоматического управления барабанно-лопастной погрузочной машины; на фиг. 2 и 3 схема общей конструктивной компоновкиоргана погрузочной машины; на фиг/ упрощенная кинематическая схема.
Барабанно-лопастная погрузочная машина состоит из приемного 1 и перегрузочного 2 конвейеров, связанных . между собой по грузопотоку, исполнительного органа 3, в котором кинематически с возможностью независимого относительного вращения и зависимых радиальных перемещений соединены коленчатая ось с лопастями Ц и барабан 5/ и ходовой части 6, в кинематическую цепь редуктора ходовой части 7 кбторой введена управляемая реверсивная муфта 8, а гусеничный движитель с поворотной рамой 9 механически соединен с редуктором ходовой части 7. На поворотной раме ходовой части ,|((стко установлены исполнительный орган 3 и приемный конвейер 1. Перегрузочный конвейер 2 установлен с возможностью горизонтальных и вертикальных перемещений на гусеничном движителе. Погрузочная машина также включает асинхронные двигатели барабана 1П и ходовой части 11, регулятор режима работы и гидропривод коленчатой оси 12, в котором нерегулируемые насос 13 и гидромотор 1 гидравлически сое динены через гидрозолотник 15 с элек тромагнитным управлением. В погрузоч ной машине кинематически связаны аси Яронный двигатель ходовой части 11 с редуктором ходовой части 7 и нерегул руемым насосом 13, асинхронный двигатель барабана 10 с барабаном 5 и коленчатая ось с лопастями с нерегулируемым гидромотором I. Регулятор режима работы погрузочной машины включает трехпозиционный электромагнитный привод 16, имеющий механическую связь с управляемой реверсивной муфтой 8, электронный ключ lV и соединенные последовательно датчик средней нагрузки на асинхронномдвигателе барабана 18, чувствительный элемент которого - трансформатор тока включен в фазе статора асинхрон ного двигателя барабана 10, схему 19 сравнения через вычитающий вход, на суммирующий вход которой подана величина,пропорциональная номинальной нагрузке на асинхронном двигателе барабана 10, логическую схему 20 через второй выход, пороговый элемен 21 с заданным порогом срабатывания, выход которого соединен с вторым входом трехпозиционного злектромаг-нитнЬго привода 16 и управляющим вхр дом электронного ключа 17. Регулятор режима работы машины включает также датчик положения коленчатой оси 2 и фиксатор положений коленчатой оси 23 Логическая схема 20 имеет два выхода. Каналг первого выхода, подключенный на электромагнит управления гидрозолотника 15, включает логический элемент вь1деления положиТельного сигнала, логический элемент НЕ и усилитель мощности на тири сторе, а канал BTopoi o выхода включа ет логический элемент выделения отрицательного сигнала. Электронный ключ 1 в норма:льном состоянии замкнут и посредством его магиотрального входа электрически соединяются выход фиксатора положений коленчатой оси 23 с первым входом трехпозиционного электромагнитного привода 16. Трехпозиционный электромагнитный Г 54 привод 16 имеет два входа, в каналы каждого из которых - усилитель мощности на тиристоре и электромаг,нит, Нейтральное положение управляемой реверсивной муфты 8 фиксируется уравновешенными возвратными пружинами при отключенных обоих электромагнитах.- трехпозиционного электромагнитного Привода 16. Датчик нагрузки на асинхронном двигателе барабана 18 включает трансформатор тока, двухполупериодный выпрямитель и сглаживакхций фильтр. На функциональной схеме (фиг. 1) функциональные узлы и блоки устрой- . ства автоматического управления барабанно-лопастной погрузочной машиной обозначены укрупненно, без уточнения конструктивного их исполнения. Эти узлы содержат ряд элементов, которые поясняют сущность работы погрузочной машины, взаимодействие органов ее с горной массой и между собой и процесс автоматического управления режимом работы погрузочной машины. TaKjколенчатая ось с лопастями Ц включает саму коленчатую ось 2k, цилиндрические, шарниры 25и лопасти 2б, а в конструкцию барабана 5 входят еще цилиндрические вращающиеся шарниры 27 и подшипники барабана 28. Асинхронный двигатель барабана 10 передает вращение на барабан 5 через редуктор 29 с двумя груп,пами шестерен, синхронизированных валом 30 синхронизации. Гидропривод коленчатой оси 12 включает редуктор коленчатой оси 31 и предохранительный гидроклапан 32. В конструкцию датчика положения коленчатой оси 22 входит шестеренная передача 33. Ходовая часть включает следующие дополнительные конструктивные элементы; двухлучевую рукоять 3+ с вмонтированными в ее оба луча подшипника- ми 35, поворотную раму 36, гидродомкраты 37 поворота этой рамы, фрикционы поворота гусениц 38 (правый и левый), ведущую и отклоняющую звездочки 39 гусеничный движитель 4о, опорно-поворотный шарнир 1 (с огра-. ничителями поворота) , гидродомкраты подъема рамы 2, питатель и раму гусеничного движителя {. В конструкцию приемного конвейера 1 погрузочной машины входят боковины конвейера 5 роликоопоры k6 и лента 47. Заборная часть приемного конвейера 8 расположена в полости питателя 9..
Чувствительным элементом датчика средней нагрузки на асинхронном двигателе барабана 18 является трансформатор 50 тока. Группы шестерен редуктора 29 закреплены на лучах рукояти З. асинхронный двигатель барабана 10 установлен на верхней площадке поворотной рамы 36, которая совместно с двухплечевой рукоятью и питателем 3 составляет единую сварную конструкцию. Барабан 5 посредством подшипников барабана 28 насажен на коленчатую ось 2k, закрепленную в лучах двухлучевой рук-ояти 3 на подшипниках 35. Коленчатая ось 2k приводится во вращение через редуктор коленчатой оси 31 от нерегулируемого гидромотора 1, который жестко установлен на внешней левой стороне двухлучевой рукояти З На коленчатой оси 2k цилиндрическими шарнирами 25 закреплены лопасти 26. При вращении коленчатой оси 2k лопасти 2б радиально перемещаются относительно барабана 5 в цилиндрических вращающихся шарнирах 27, вмонтированных в барабан 5.
Поворотная рама Зб связана посредством опорно-поворотного шарнира 1 с ограничителями, гидродомк|3атов 37 поворота и подъема рамы k2 с рамо гусеничного движителя kk Управлениефрикционами поворота гусениц 38 осуществляется от гидросистемы управления (гидросистема управления на фиг. 2 и 3 не показана, так как она соответствует выпускаемой серийно погрузочной машине 1 ПНБ-2), В питателе 43 установлены роликоопоры k6 приемного.конвейера 1, по которому дв жется лента 7, а на поворотной раме 36 жестко закреплены боковины koнвeйepa 45.
Датчик положения коленчатой оси 2 (сельсин)связан кинематически с коленчатой осью 2k через шестеренную передачу 33- В статорной цепи асинхронного двигателя барабана 10 установлен трансформатор 50 трка, фиксирующий ток (нагрузку ) этого двигателя или в другом масштабе момент сопротивления на барабане 5 и лопастях 26 от взаимодействия исполиительного органа 3 со штабелем погружаемого Материала. Выходные информационные связи -(цепи ), подключенные к рерулятору режима работы погрузочной машины с датчика положения коленчатой оси 22 и с трансформатора 50 тока обозначены на фиг. k буквами с и Ъ , а управления, поступающие от этого же регулятора режима работы на электромагниты управления гидроаолотника
15и электромагниты трехпозиционного электромагнитного привода 16 - буквам с, d, е.
Передняя торцовая кромка питателя k3 выполнена, в форме косого ножа с переменной кривизной и способствует хорошему подбору вязкой погружаемой массы с почвы, что повышает производительность погрузочной машины,
Указанная форма питателя k3 способствует также исключению торцовых динамиче.ских ударов лопастей 26 с неровностями почвы и твердыми включениями в погружаемой массе,
Устройство автоматического управления барабанно-лопастной погрузочной машиной работает следующим образом.
Машинист включает асинхронные двигатели барабана 10 и ходовой части 11 и ручным управлением посредством воздействий на электромагниты трехпозиционного электромагнитного привода
16обеспечивает .движение машины на штабель погружаемой массы с работающим исполнительным органом 3- Это достигается тем, что трехпозиционный электромагнитный привод 16 включает управляемую реверсивную муфту 8 в соответствующую кинематическую связь редуктора ходовой части 7 и гус ничного движителя kO, При заходе лопастей 2б в штабель подготовительные маневровые операции заканчиваются. Машинист отключает трехпозиционный электромагнитный привод 16.и управляемая реверсивная муфта 8 под действ.ием возвратных пружин переходит в нейтральное положение. Машина начинает погрузку в автоматическом ..режиме. Асинхронный двигатель барабана; 10. вращает с однонаправленной большой скоростью через кинематическую цепь редуктора 29 барабан 5j который синхронно передает вращательное движение на лопасти 26. Лопасти 26 захватывают погружаемую массу в рабочей зоне погрузки с торца питателя k3 и переносят ее по барабану 10 к ленте kj приёмного конвейера ,1 -который передаёт, погружаемую массу на перегрузочный конвейер 2 и далее - в транспортный сосуд-(перегрузочный конвейер 2 и транспортный сосуд на фиг. 2 и 3 не показаны). Одновременно с включением асинхронного двигате ля ходовой части 11 начинает работать нерегулируемый насос 13- Так как гидрозрлотник 15 с электромагнитным управлением соединяет напорные гидромагистрали нерегулируемых насоса 13 и гидромотора 1, то последний через редуктор коленчатой оси 31 приводит коленчатую ось 24 во вращение с малой скоростью, соответствующей по направлению скорости вращения барабана 5 Вращение коленчатой оси 2k обеспечивает плавное и медленное перемещение максимального вылета лопастей 26 по траектории окружности L, причем за один оборот колеучатой оси 2k лопасти 26 постепенно обработают всю зону L пространства. С каждым захватом лопастями 26 погружаемого материала снимается и транспортируется, снизу вверх от штабеля его стружка, ограниченная по площади шйгрм эпицик лоид от соседних лопастей 2б. Если объем погружаемого материала достаточно велик и момеНт сопротивле ния на лопастях 2б больше номинально вращающего момента асинхронного двигателя барабана 10, то регулятор режима работы (фиг. 1 ) формирует уп равлени.е, направленное на остановку вращения коленчатой оси 2 (фиг. 3), путем Переключения гидрозолотника 15с электромагнитным управлением . сигналом поданым на С-вход его электромагнита. Запираются напорная и сливная гидромагистрали нерегулируемого гидромотора 1 и весь расход . масла нерегулируемого насоса 13 идет на слив через предохранительный гидроклапан 32. Коленчатая.ось 2k останавливается и как результат, лопасти 26 в рабоче зоне погрузки, где постепенно о пол за ет нависший карниз погружаемой . массы, имеют постоянный вылет-и равномерно отбирают погружаемую массу, восстанавливая тем самь1м момент сопротивления от штабеля до уровня номинального значения. После выбора карниза снимается управление с С-входа электромагнита гидрозолотника 15 с электромагнитный управлением и происходит дальнейшая обработка
штабеля в зоне L-пространства.
Кратковременные импульсные перегрузки, являющиеся следствием удар- lb
нетствует времени, в течение которого погрузочная машина перемещается на штабель на расстояние равное макси8ных взаимодействий лопастей 2б со штабелем, в. течение которых не успе-. вает сформироваться .управляющий си(внал С, нейтрализуются кратковременными включениями предохранительного гидроклапана 32. В результате многократного импульсного срабатыва- ния предохранительного гидроклапана 32 (работа в вибрационном режиме) получается мягкая механическая характеристика нерегулируемого гидромотора Tt, способствующая снижению динамических перегрузок на исполнительном органе 3В случаях, когда за счет сползания большого объема погружаемой массы (обрушение карниза) момент српротивлеНия на лопастях 26 достигает величины выше допустимого значения , регулятор режима работы формирует управление в виде сигнала е на правый электромагнит трехпозиционного электромагнитного привода 16. Управляемая реверсивная (иуфта 8, выйдя из нейтрального положения (в нейтральном положении ее гусеничный движитель kQ остановлен), обеспечивает через.редуктор ходовой части 7 отход погрузочной м1ашины от штабеля. В результате такого управления режимом подачи машины момент на лопастях 2б уменьшается до допустимого значения. Это приводит к разгрузке исполнительного ор- гана 3, отключению управляющего сигнала ё и окончанию импульса отхода машины из опасной, с точки зрения механических поломок, зоны погрузки. Далее процесс погрузки продолжа-ется аналогично. Импульс рабочей подачи погрузочной машины вперед также формируется, в соответствии с режимом работы исполнительного органа 3Здесь подается управляющий сигнал .. ..... ... .. dVta левый электромагнит трехпозиционного электромагнитного привода 16 в момент, когда коленчатая ось 2 Х1роходит в цикле вращения участок, соответствующий холостому ходу исполнительного органа 3, т.е. в момент, когда лопасти 26 имеют нулевой вылет в рабочей зоне погрузки и не взаимодействуют с погружаемой массой, Длительность управляющего сигнала сЗ, формируемого регулятором, соот9вылету лопастей 26 из бара мальному бана 5. В целях обеспечения автоматического управления режимом работы погрузочной машины, в ее конструкцию (фиг. З) входят информационные элементы: трансформатор 50 тока, выход ной сигнал t) которого пропорциона лен моменту сопротивления штабеля на исполнительном органе 3 и датчик положения коленчатой оси 22 (сельси с приводом от шестеренной передачи 33, выходной сигнал а которого оп ределяет угол поворота коленчатой оси 24 или положение лопастей 26 6 бочей зоне погрузки. Поворотная рама 36 совместно с двухплечевой рукоятью, питателем 3 приемным конвейером .1 , гидродомкрата ми подъема рамы 42, редуктором 29, асинхронными двигателем барабана 10 и нерегулируемым гидромотором .Н поворачивается на опорно-поворотном шарнире гидродомкратами поворота ;рамы 37 в пределах ±30° относитель но оси рамы гусеТничного движителя в горизонтальной, плоскости, обеспечивая тем самым требуемый по ширине фронт погрузки горной массы. Пово ротная рама Зб также перемещается в вертикальной плоскости гидродоАкрата ми подъема рамы 2, обеспечивая тем самым требуемую высоту погрузки и во можность выполнения маневровых опера ций погрузочной машиной. Управление режимом работы погрузо ной машины заключается в автоматичес ком управлении величиной объема зачерпывания лопастями 26 догружаемой массы в функции момента сопротивлени на исполнительном органе 3 и в дискретном автоматическом управлении величиной средней скорости подачи машины в функции положения лопастей 2б относительно штабеля с коррекцией по допустимым нагрузкам на исполнительном органе 3Информацию о среднем моменте со-, противления погружаемой массы зачерпыванию на исполнительном органе 3, который является следствием случайных величин, определяемых физикомеханическими свойствами самой погружаемой массы и объемом ее зачерпывания, получают с выхода датчика средней нагрузки на асинхронном двига теле барабана 18 по величине среднего тока, потребляемого асинхронным 5 двигателем барабана 10. Эта информация в виде электрического сигнала сравнивается на схеме 19 сравнения с постоянным по величине заданным сигналом, пропорциональным номинальному значению тока на асинхронном двигателе барабана 10. Выходной сигнал 19 сравнения, характеризующий величину пе(эегрузки или недогрузки по току асинхронного двигателя барабана 10, поступает на вход логической схемы 20. При недогрузке асинхронного двигателя барабана 10, при низкой весовой производительности машины, положительный сигнал, поступающий на вход логической схемы 20, проходя через ее логический элемент НЕ -и усилитель мощности на тиристоре, преобразовывается в логический нуль, который снимается с первого выхода логической схемы 20 и подается на электромагнит гидрозолотника 15 с электромагнитным управлением, обеспечивая нулевой сигнал С. Соответственно гидрозолотник 15 с электромагнитным управлением соединяет напорные гидромагистрали нерегулируемых насоса 13 и гидромотора И и последний приводит в равномерное вращение коленчатую ось с лопастями Ц. Этим достигается активный поиск лопастями 26 (фиг. 2) погружаемой массы в расширенной рабочей зоне погрузки по траектории окружности L. Как результат интенсивной обработки этой зоны, происходит автоматическая дозагрузка исполнительного 3 до номинального значения. Производительность погрузочной машины повышается, а установленная мощность на асинхронном двигателе барабана 10 используется рационально. При перегрузке асинхронного двигателя барабана 10 в допустимых пределах, например, за счет медленного сползания карниза погружаемой массы или по другой причине, отрицательный сигнал по каналу первого выхода логической схемы 20 не проходит, поэтому на выходе логического элемента НЕ появляется логическая единица, которая усиливается на тиристоре до мощного сигнала С. В гидроприводе коленчатой оси 12 переключается гидрозолотник 15 с электромагнитным управлением, что обеспечивает останов вращения коленчатой оси с лопастями 4. Это приводит к стабилизации зоны отбора погружаемой массы до тех пор, пока указанная перегрузка не устраняется. Если в процессе погрузки перегруз на на асинхронном двигателе барабана 10 за счет обрушения большого объема погружаемой массы или при встрече лопастей 26с непреодолимой преградо .(работа исполнительного органа 3 на упор) превышает допустимое значение, то вступает в работу канал второго выхода логической схемы 20. Здесь отрицательный сигнал, снима мый со второго выхода логической схе мы 20 превышает порог срабатывания t-ди, устанавливаемый на пороговом элементе 21 и соответствующий величи не допустимой перегрузки исполнитель ного органа З; На выходе порогового элемента 21 формируется единичный си нал, который поступает на управляющи вход электронного ключа 17 и размыкает его. Этим обеспечивается запрет прохождения управления (запрет сигнала .d) на первый вход трехпозицирнного электромагнитного привода 16.с фиксатора положений коленчатой оси 23, что приводит к запрету включения управляемой реверсивной муфты 8 в сторону подачи машины на штабель Этот же единичный сигнал,снимаемый с вЫ хода порогового элемента 21, поступает на второй вход трехпозиционного элек тромагнитного привода 16, в котором он усиливается на тиристоре и формируется в сигнал управления (сигнал е). Правый электромагнит трехпозиционного электромагнитного привода 16 переводит управляемую реверсивную муфту 8 в сторону отхода машины от штабеля. Процесс отхода продолжается до тех пор, пока перегрузка на асинхронном двигателе барабана 10 не становится меньше допустимого значения. Таким образом, в случае недопустимой перегрузки на исполнительном органе 3 происходит при останъёНён ной коленчатой оси с /юпастями k и невозможности (запрете) подачи машины на штабель автоматический отход ее от штабеля. Аварийная перегрузка будет ликвидирована. Рабочая подача машины на штабеЛь при отсутствии недопустимых перегру зок на исполнительном органе 3 производится автоматически по команде фиксатора положений коленчатой оси . 23 в момент, когда расположение коленчатой оси с лопастями Ц соответствует холостому ходу исполнитель-, ного органа 3По величине амплитуды сигнала а, снимаемого с выхода датчика положений коленчатой оси 22, опреде- ляют текущий угол поворота коленчатой оси с лопастями Ц и с помощью фиксатора положений коленчатой оси 23 (триггер Шмидта )с заданными уровнями срабатывания и отключения формируют импульс, приводящий к импульсной подаче машины на штабель, формирование указанного импульса происходит следующим образом. В начале холостого хода исполнительного органа 3 совпадают значения ампли-туды сигнала а с уровнем срабатывания фиксатора положений коленчатой оси 23 и на выходе последнего генерируется единичный логический сигнал, который подается на первый вход трехпозиционного электромагнитного привода 16 через замкнутый электронный ключ 17. Вращаясь с однонаправленной скоростью коленчатая ось с лопастями k доходит до положения, соответствующего окончанию холостого хода исполнительного органа 3, при котором совпадают значения амплитуды сигнала а, снимаемого с датчика положения коленчатрй оси 22, с уровнем отключения фиксатора положений коленчатой оси 23 и на выходе последнего ранее генерируемый единичный логический сигнал перебрасывается в нулевой уровень. Таким образом, за время холостого хода исполнительного органа 3 формируемый на выходе фиксатора положений , коленчатрй оси 23 логический импульсный сигнал присутствует на первом входе трехпозиционного электромагнит-ного привода 16. 8 этом приводе логический, импульсный сигнал усиливается на тиристоре и формируется в управляюций сигнал, который включает левым электромагнитом управляемую реверсивную муфту 8 в, положение, соответствующее подаче погрузочной машины на штабель . Длительность управляющего мощного сигнала равна времени, в течение которого ходовая часть 6 с-работающим исполнительным органом 3 проходит путь, равный мак- симальному вылету лопастей 26 из барабана 5. В дальнейшем цикл работы погрузочной машины е автоматическом режиме повторяется,
В период каждого цикла возможные перегрузки на исполнительном органе 3i асинхронном двигателе барабана 10 и в редукторе 29 локализуются регулятором режима автоматически на уровне допустимых значений, что
обеспечивает высокую надежность работы погрузочной машины, а при недогрузке исполнительного органа 3 формируется управление, направленное на повышение объема зачерпывания погружаемой масоы, что обеспечивает высокую производительность пог узочной машины.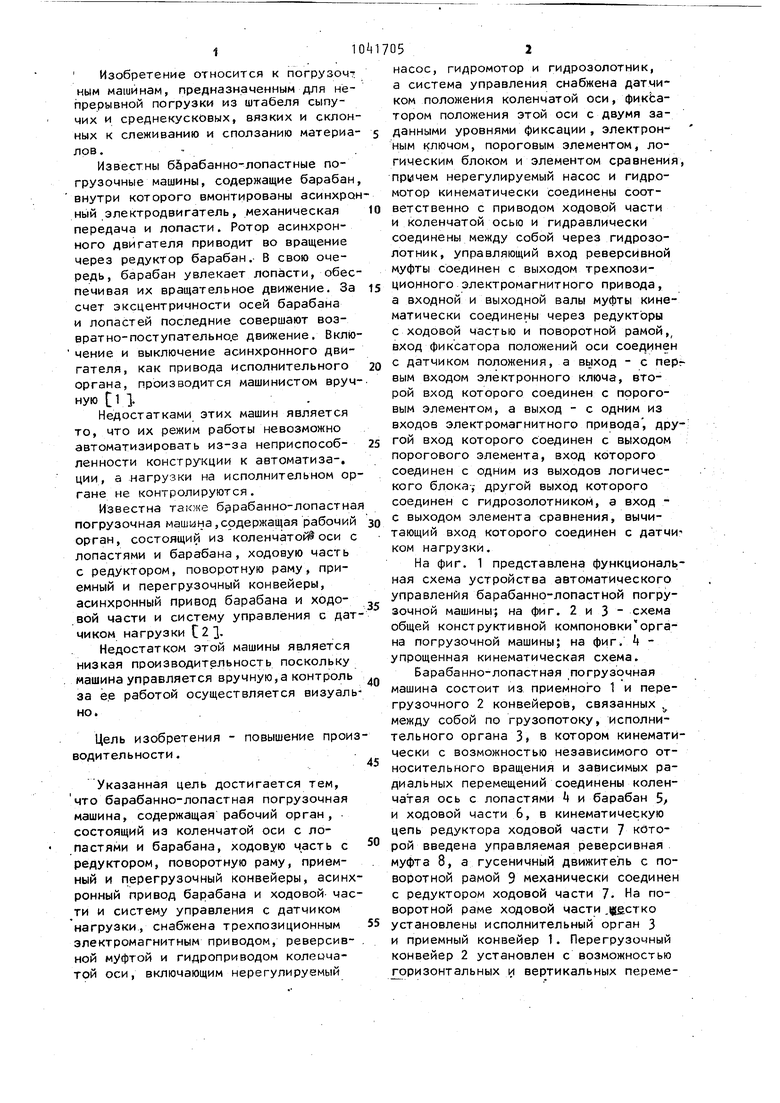


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления режимом работы погрузочной машины с барабанно-лопастным исполнительным органом | 1979 |
|
SU866236A1 |
| Устройство для управления механизмом подачи погрузочной машины непрерывного действия | 1980 |
|
SU956710A1 |
| Устройство для управления механизмом подачи погрузочной машины непрерывного действия | 1981 |
|
SU1036861A2 |
| Устройство автоматического управления режимом работы погрузочной машины с нагребными лапами | 1976 |
|
SU654799A1 |
| Устройство автоматического управления горной погрузочной машиной с нагребными лапами | 1978 |
|
SU875028A1 |
| Устройство дискретного управления режимом работы погрузочной машины с нагребными лапами | 1982 |
|
SU1068596A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1995 |
|
RU2097569C1 |
| Погрузочная машина | 1975 |
|
SU600307A1 |
| Способ автоматического управлениягОРНОй МАшиНОй | 1978 |
|
SU810963A1 |
| УКЛАДЧИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2076167C1 |


И 6 hl.l 29 47 / I J6 2 ЗЭ 0 Фиг.г 1 29 HI W
i J 29 30
lotiyo
37 145
.fO 7 вДДД IS
| i | |||
| БАРАБАННО-ЛОПАСТНОЙ ПОГРУЗОЧНЫЙ ОРГАН | 0 |
|
SU263530A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и др | |||
| Погрузочные машины для сыпучих и кусковых мате- | |||
| риалов, М., Машгиз, 1962, с | |||
