(54) ГИДРОПРИВОДНОЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидрообъемный ходоуменьшитель самоходной машины | 1988 |
|
SU1579799A1 |
| Система приводов трактора | 1983 |
|
SU1131686A1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2000 |
|
RU2184281C2 |
| Бурильная машина | 1986 |
|
SU1320406A1 |
| ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ ПРЕИМУЩЕСТВЕННО СЕЛЬСКОХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ | 1994 |
|
RU2041583C1 |
| Гидромеханический ходоуменьшительдля зЕМлЕРОйНОй МАшиНы | 1979 |
|
SU819285A1 |
| Гидрообъемный ходоуменьшитель самоходной машины | 1985 |
|
SU1299844A1 |
| ГИДРООБЪЕМНЫЙ ПРИВОД ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА АВТОМАТИЧЕСКОЙ СМЕНЫ РАБОЧЕЙ ЖИДКОСТИ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, НАСОСНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА КОНДИЦИОНИРОВАНИЯ И РЕВЕРСА ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА И ГИДРОМОТОРНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108507C1 |
| Многодиапазонный гидромеханический ходоуменьшитель транспортного средства | 1987 |
|
SU1418087A1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
1
Изобретение относится к гидроприводным исполнительным механизмам комбинированного типа и может быть использовано в следящих приводах различных областей машиностроения.
Известен гидроприводной исполнитель- 5 ный механизм, содержащий приводной двигатель, трехэлементный дифференциальный механизм, один элемент которого соединен с выходным валом, второй - с входным валом и приводным двигателем, а третий - Q с гидрообъемным тормозом, включающим напорную гидролинию, гидромашину, дроссель и подпорный клапан, установленный на выходе гидромашины 1.
Недостатком известного устройства яв- ,5 ляется наличие зазоров в кинематической цепи, что приводит к снижению точности обработки управляющих сигналов и затрудняет использование этого устройства в следящих системах.
Цель изобретения - повыщение точное- ° ти отработки сигнала управления.
Поставленная цель достигается тем, что гидромашина тормоза и приводной двигатель выполнены в виде гидродвигателей, а
исполнительный механизм снабжен натяжным устройством, выполненным в виде гидродвигателя, соединенного с выходным валом, и дополнительного дросселя, установленного на входе в приводной гидродвигатель, причем все гидродвигатели соединены с напорной гидролинией параллельно, а основной- дроссель установлен на входе в гидродвигатель тормоза.
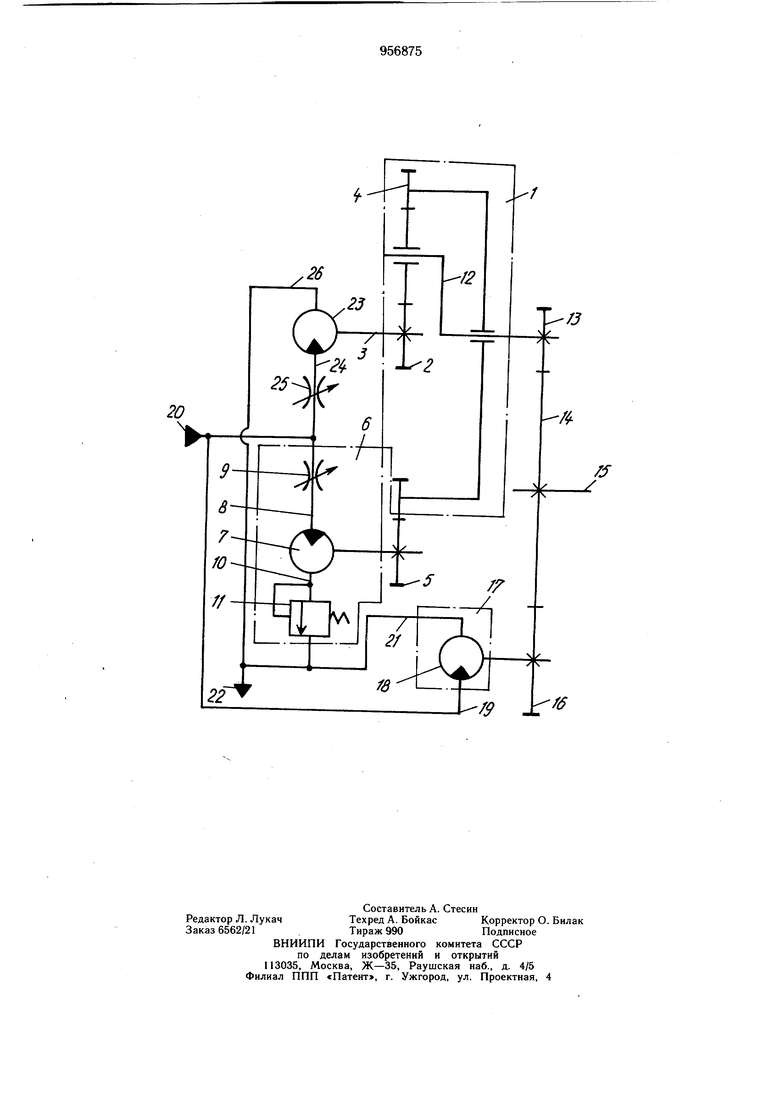
На чертеже изображена принципиальная схема гидроприводного исполнительного механизма.
Гидролриводной исполнительный механизм содержит трехэлементный дифференциальный механизм 1, солнечная шестерня 2 которого соединена с входшл валом 3, коронная шестерня 4 через шестерню 5 - с гидрообъемным тормозом 6, включающим гидродвигатель 7, на входе 8 которого установлен дроссель 9, а на выходе 10 - подпорный клапан 11, а водило 12 через шестерни 13 и 14 соединено с выходным валом 15. Кроме того, выходной вал 15 через шестерни 14 и 16 соединен с натяжным устройством 17, выполненным в виде гидродвигателя 18, вход 19 которого соединен с напорной гидролинией 20, а выход 21 - со сливом 22. На входном валу 3 установлен приводной гидродвигатель 23, вход 24 которого соединен через дополнительный дроссель 25 с напорной гидролинией 20, а выход 26 - со сливом 22. Вход 8 гидродвигателя 7 тормоза 6 подсоединен через дроссель 9 к на1юрной гидролинии 20, а выход 10 через подпорный клапан 11 - со сливом 22. Гидроприводной исполнительный механизм работает следующим образом. При подаче рабочей жидкости под давлением в напорную гидролинию 20 гидродвигатели 7, 18 и 23 вращаются со скоростью, обусловленной сопротивлениями дросселей 9 и 25, причем гидродвигатели 7 и 23 соединены с дифференциальным механизмом 1 таким образом, что солнечная шестерня 2 и коронная шестерня 4 вращаются в разные стороны. На водиле 12 реализуется разность скоростей гидродвигателей 7 и 23, зависящая также от передаточных отношений планетарного рода. Одновременно рабочая жидкость из напорной гидролинии 20 поступает на вход 19 гидродвигателя 18, создающего момент, превышающий максимальный момент нагрузки, прикладываемый к выходному валу 15, и обеспечивающий во всей кинематической цепи выбор зазоров. Для компенсации сопутствующей нагрузки, приложенной от гидродвигателя 18 к гидродвигателю 7, последний нагружается установленным на его выходе подпорным клапаном 11. При смене знака от нагрузки, приложенной к выходному валу 15, и при реверсе выходного вала 15 моменты на гидродвигателях 7 и 23 изменяются по величине, но не меняют знак. Это обеспечивает устойчивую и точную работу. Таким образом, предлагаемый гидроприводной исполнительный механизм позволяет повысить точность отработки сигналов управления и выбрать люфты в кинематической цепи механизма. Формула изобретения Гидроприводной исполнительный механизм, содержащий приводной двигатель, трехэлементный дифференциальный механизм, один элемент которого соединен с выходным валом, второй - . с входным валом и приводным двигателем, а третий - с гидрообъемным тормозом, включающим напорную гидролинию, гидромашину, дроссель и подпорный клапан, установленный на выходе гидромашины, отличающийся тем, что, с целью повыщения точности отработки сигнала управления, гидромашина тормоза и приводной двигатель выполнены в виде гидродвигателей, а исполнительный механизм снабжен натяжным устройством, выполненным в виде гидродвигателя, соединенного с выходным валом, и дополнительного дросселя, установленного на входе в приводной гидродвигатель, причем все гидродвигатели соединены с напорной гидролинией параллельно, а основной дроссель установлен на входе в гидродвигатель тормоза. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 471215, кл. В 60 К 17/10, 1975.
