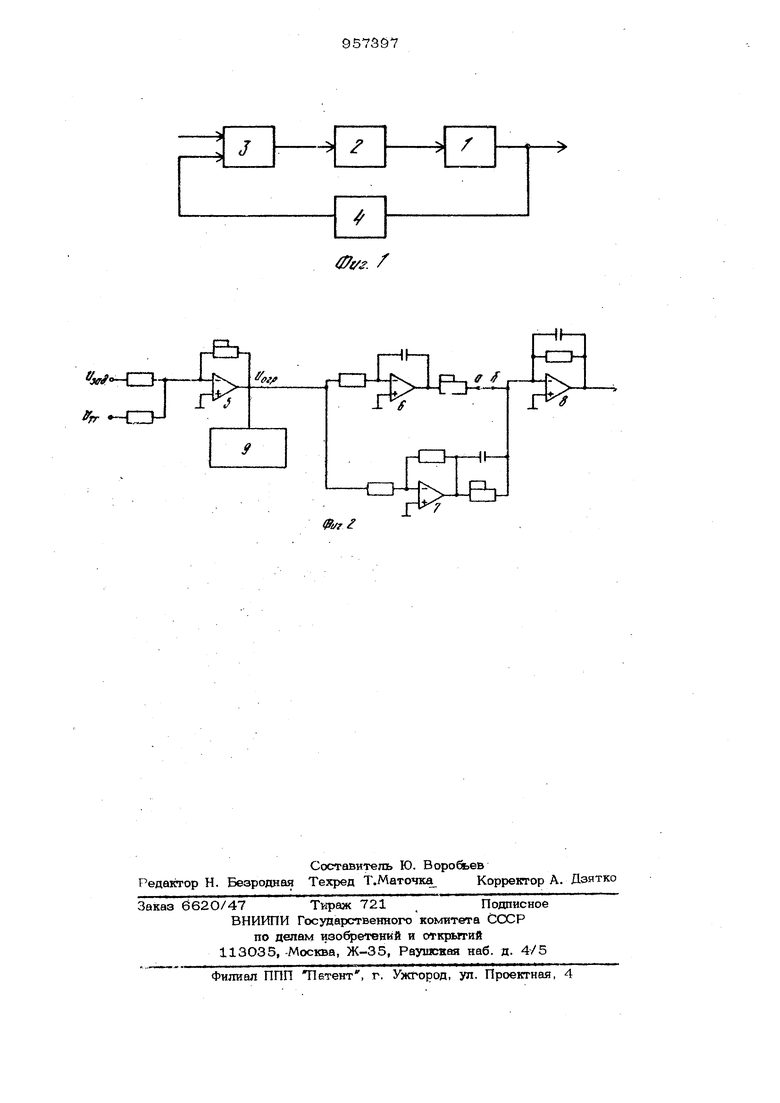
гугяруемкй эпоктропривод, с йиржащий последовательно соединешгью электродви гатель. .кзгоянплго тока, силовой преобразоь ггель, регулятор скорости, один выход которого соединен с источником задакщего напряжения, а второй - с тахогенератором, вал которого сочленен с ьалом электродвигат -2ля 2 . Регулятор скорости в этом устройстве реализует йередаточную функцию вида 1рП«рТ,р.И Тр г.«А,1Р) - де (р коэффициент пропорционального усиления П-канала; постоянная интегрирования И-ка нала; Т. - постоянная дифференцирования Д канала, Недостатком устройства являеТсяг относительно невысокое быстродействие в связи с тем, что вид передаточной функт::/ легулятора скорости не является оптиг-лы&кым. Иель изобретения повыиение быстро цействня и улучшение качества регул фовь ,ш элекггроприьода. ПоствЕленная цель достигается тем, . .гор скорости состоит из пропс .дгионалъного усилитеяя, выход которого через телгегрирукяций усилитель соеди с прююрциональным входом, а через i .зер ирующий усилитель - с пропордиокащзно-дифференцируюйшм входом .аперио дического усилителя, выход которого является выходом ;регулятора. На фиг. 1 приведена блок-схема ред-улируемого электрсятривода; на фнг. 2 схема регулятора скорости. Регулируемый электропривод (фиг.1 содержит последовательно соединенные злектродвигатель 1 постоянного тока, си ловой преобразователь 2, регулятор 3 скорости, один выход которого соединен с иcтoчникo задакяцего напряжения, а второй - с тахогенератором 4, вал которого сочленен с валом электродвигаTejra 1. Регулятор 3 скорости состоит из про лордионального усилителя 5, которого через шггегрируклний усилитель 6 соединен с пропорциональным входом, а ерез инвертирукяций усилитель 7 с пропорциональнот-дифференцнрукнцим входом апериодического усшгателя 8,-выход которого является выходом регулятора 3. выходу усилителя 5 подключена схема ограничения напряжения.| Регутгаруемый электропривод работает ледующим образом. Оптимальное согласование с объектом егулирования достигается за счет обесечения регулятором 3 -передаточной функии вида TJap aP де k п - коэффициент усиления пропорционального звена регулятора 3; постоянная интегрирования регулятора 3; постоянная дифференцирования регулятора 3; постоянная демпфирования регулятора 3; (где Кр коэффициент проTj-Kp-Tорционального усиления ПД - канала реулятора 3). Полное соглеюование регулятора 3 с электродвигателем 1 происходит при Т Т и )v,, где Тэ - электромагнитная j - электромеханическая постоянные времени электродвигателя. Электропривод позволяет последовательно настроить параметры ре1 улятора и по виду кривой переходного процесса тока якоря, а Kj, - по виду кривой переходного процесса частоты вращения. На усилителе 5 выполнено пропорциональное звено с коэффициентом передачи по напряжению тахогенератора 4 . Rg / Ry переходных режимах пуска и торможения выходное напряжение усилителя 5 ограничивается 9 ог|)аничения на уровне Uprp . При этом величина формирующегося динамического то ка 2tf электродвигателя 1 определяется Выражением Ur ч .. и L б Rg -эквивалентное активное сопротивление якорной цепи электродвигателя Ij Kj.- статический коэффициент nepef дачи силового преобразователя 2. Лракпгческвя настройка параметров регулятора 3 осуществляется следующим образом. Свачала производится установка резистором RI соотношения . Для этого вал электродвигателя 1 зажимает ;ся, размыкается перемычка а-б (фиг. 2 на вход подаемся скачвк задающего напряжения, на экране осциллографа наблю дается переходной npcMiedC тока двигате ля. При точном соответствии пе реходный процесс тока имеет экспоненциальный характер с постоянной времени и описывается выражением IIin-k -I °Pfi Следукщей производится установка ре зистором РЗ соотношения Т-г , где i . ;T CjR2, для этого восстанавливается перемычка а-б, двш атель переводится в режим холостого хода, на вход системы подается скачок задающег напряжения, на экране осциллографа каблкдается переходной процесс динамичес кого тока Зд электродвигателя. При установленном соотношении переход 1ШЙ процесс тока носит экспоненциальны характер с постоянной времени tj RC и описывается выражением )При настройке параметров Т и Т предполагалось, что силовой преобразова тель работает в режиме непрерывного тока. Выполнение условий настройки параметров регулятора и позволяет описать систему регутгарования инерционным звеном второго порядка с перюдаточной .функцией V4(pi. , МР) fjTipT,pn где Т, Т, /К 5J - постоянная интегрирования контура регулирования частоты враV nKcli.p- контурный Cg - постоянная ЭДС двигателя; . коэффициент передачи тахогенератора. При оптимальном значении относитель ного коэффициента дeмзiфиpoвaния g, лЩ ,5 частота среза разомкнутой сист€ ср. т 1 Го есть быстродействи определяется постоянной демпфирования регутштора, минимальное значение которой зависит от типа используемого силового преобразователя. Для настройки переходиОГО-процесса частоты вращения на оптимальное значе ние относительного коэффициента демпфирования 0,5 поступают следующим образом. И а вход системы подается скачок задающего напряжения такой величины, чтобы выходное напряжение усилителя 5 не превышало уровня ограничения, а выходное напряжение усилителя 8 уровня насьщения. При этом на экране осциллографа по напряжению тахогенератора liaблюдается кривая переходного процесса частоты вращения. Резистор R устанавливается в такое положение, при котором перерегулирование в кривой переходного процесса составляет 15%. Это будет соответствовать ,5. Повьпиение точности настройки регулятора с одновременным упрощением настройки позволяет более полно практически реализовать потенциальные динамические возможности системы регулирования. Увеличение за счет этого быстродействий системы с улучшением качества переходного процесса по управлению при использовании ее в качестве привода подачи металлорежущих станков позволяет повысить точность и чистоту при контурной обработке, а также точность позиционирования. Формула изобретения Регулируемый электрсэтривод , содержащий последовательно соединенные элеК тродвигатель Достоянного тока, силовой преофазователь, регулятор скорости, один вход которого соединен с источником задающего напря Ления, а второй - с тахогенератором, вал которого сочленен с валом электродвигателя, отличающ И и с я тем, яп-р, .с целью увеличения йлстродействия, и улучшения качеств1а егулирования, регулятор скорости сосоит из пропорционального усилителя, вы од которого через интегрирукяций усиитель соединен с пропорциональным вхо ом, а через инвертирующий усилитель пропорционально-дифференцирующим вхо ом апериодического усилителя, выход коорого является выходом регулятора. Источники информации, принятые во внимание цри экспертизе 1.Авторское свидетельс;тво СССР 635585, кп. Н 02 Р 5/06, 1978. 2.Заявка ФРГ № 25О8434, Л.О- 05 В 11/42, 27.02.75,
. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ демпфирования колебаний в элетроприводе и устройство для его осуществления | 1977 |
|
SU693525A1 |
| Устройство для демпфирования колебаний в упругой связи между двигателем и механизмом электропривода | 1978 |
|
SU714607A1 |
| Регулятор числа оборотов двигателя | 1978 |
|
SU708065A2 |
| Электропривод постоянного тока | 1987 |
|
SU1628173A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1984 |
|
SU1159139A1 |
| Устройство для регулирования напряжения импульсной дуги | 1983 |
|
SU1098705A1 |
| Регулируемый электропривод постоянного тока | 1981 |
|
SU968881A1 |
| Устройство для определения ускорения электрода регулятора дуговой печи | 1981 |
|
SU1086558A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
rC «4Z h
