Изобретение относится к электротехнике, а именно к электроприводам постоянного тока, и может быть использовано для автоматического управления электроприводами с подчиненным ругулированием параметров.
Цель изобретения - повышение быстродействия и точности регулирования электропривода.
На чертеже изображена функциональная схема электропривода.
Электропривод постоянного тока содержит электродвигатель 1 постоянного тока (на чертеже условно показан в виде последовательно соединенных электрической 2 и механической 3 частей), подключенный к выходу т-фазного
вентильного преобразователя 4, в цепь управления которого включены последовательно соединенные блок 5 задания скорости, первый сумматор б, регулятор 7 скорости, второй сумматор 8 и регулятор 9 тока, при этом вторые входы первого 6 и второго 8 сумматоров соединены соответственно с выходами датчика 10 скорости и датчика 11 тока, включенного между электродвигателем 1 и m-фазным печтильным преобразователем 4. Электропривод, кроме того, содержит быстродействующий источник 12 напряжения последовательно соединенные дополнительный блок 13 регулирования скорости, первое корректирующее звено 14, третий сумматор 15 идоCN
ю
00
VJ CJ
полнительный регулятор 16 тока, второй датчик 17 тока и три корректирующих звена 18-20.
Вход дополнительного блока 13 регулирования скорости подключен к выходу вто- рого сумматора 8, выход дополнительного регулятора 16 тока подключен к управляющему входу быстродействующего источника 12 напряжения, выход которого включен параллельно выходу m-фазного вентильно- го преобразователя 4, второй датчик 17тока включен между быстродействующим источником 12 напряжения и электродвигателем 1, а его выход соединен с вторым входом третьего сумматора 15 и через второе кор- ректирующее звено 18 с третьим входом второго сумматора 8, третье корректирующее звено 19 включено между выходом регулятора 9 тока и управляющим входом быстродействующего источника 12 напря- жения, а четвертое корректирующее звено 20 - между выходом дополнительного регулятора 16 тока и входом m-фазного преобразователя 4.
Электропривод работает следующим образом.
Быстродействующий реверсивный источник 12 напряжения имеет токоограниче- ние, обусловленное ограниченной мощностью этого источника.
Для однократно интегрирующей систе мы регулирования скорости условие сохранения оптимальной настройки контуров регулирования при переходе электропривода постоянного тока по системе подчинен- кого регулирования, (комбинированная система) из режима малого сигнала (без то- коограничения быстродействующего реверсивного источника напряжения) в режим большого сигнала (с токоограничением бы- стродействующего реверсивного источника напряжения) соответствует изменению коэффициента передачи регулятора скорости со значения
v Tm Ki Сд Ф
Кр.С.Д. - а г К Р ас ti
где Tm-JRH/( Сд2 Ф2 ) -электромеханическая постоянная времени двигателя;
I - момент инерции привода;
Сд - конструктивная постоянная двига- теля;
ас - коэффициент, учитывающий демпфирование колебаний в контуре скороСТИ:
тт - постоянная времени интегрирования внутреннего контура тока дополнительного канала;
Кс - коэффициент обратной связи по скорости , до значения
Tm KI Сд Ф IMJ.C.O. т Р В
ас I т к.с KH
где TV постоянная времени интегрирования внутреннего контура тока основного канала.
Такой регулятор скорости можно представить статическим нелинейным звеном, имеющим излом характеристики при величине входного воздействия, соответствующем переходу внутреннего контура тока из режима работы в малом в режим большого сигнала, с коэффициента передачи от Кр.с.д. до Кр.с.о. Однако при таком регуляторе скорости характер переходных процессов в режиме малого сигнала и при больших статических нагрузках привода не соответствует оптимальному. Это связано с тем, что сигнал на входе дополнительного канала контура тока определяется только величиной динамических возмущений в комбинированной системе, в то время как значение напряжения на выходе регулятора скорости является функцией суммарного сигнала от входного задающего воздействия и статического тока нагрузки и при сравнительно высоком значении последнего отработка быстрых изменений входного воздействия малой амплитуды происходит при значении Кр.с.о. « К р.с.д.. что вызывает затягивание переходных процессов в комбинированной системе. Поэтому для сохранения оптимальной настройки комбинированной системы регулирования скорости в малом при сравнительно больших значениях тока нагрузки реализация регулятора скорости должна обеспечивать инвариантность его выходного напряжения от статического тока нагрузки, т.е. точка излома статической характеристики регулятора должна быть плавающей в функции статического тока нагрузки (т.е. в функции тока основного канала). Это достигается разнесением по каналам регулирования регулятора скорости в виде двух составляющих. Первая составляющая - основной регулятор 7 скорости с коэффициентом передачи Кр.с.о.. вторая составляющая -дополнительный блок 13 регулирования скорости с коэффициентом передачи Кр.с д./Кр.с.о.
При таком разбиении регулятора скорости, при котором его вторая составляющая с коэффициентом передачи, равным превышению коэффициента передачи дополнительного блока 13 регулирования скорости дополнительного канала регулирования комбинированной системы над коэффициентом передачи регулятора 7 скорости основного канала Кр.с.д./Кр.с.о., включена на входе замкнутого контура тока дополнительного канала (т.е. по ошибке контура тока основного канала), обеспечивается практически полная независимость дополнительного канала комбинированной системы регулирования скорости от статического тока нагрузки и сохраняется оптимальная на- стройка контура скорости.
В статических режимах при наличии нагрузки на валу привода задание на ток, соответствующий моменту нагрузки, присутствует только на выходе основного регулятора 7 скорости, В динамических режимах быстрые изменения управляющих и возмущающих воздействий в малом отрабатываются дополнительным каналом комбинированной системы, имеющим существенно большее быстродействие. При этом значение коэффициента передачи регулятора скорости всей системы Кр.с д. соответствует ее оптимальной настройке.
Описанный принцип реализации регу- лятора скорости в виде двух разнесенных по каналам регулирования составляющих применим при построении двукратно интегрирующей системы регулирования скорости. В этом случае основной регулятор 7 скоро- сти представляет собой пропорционально- интегральное звено с передаточной функцией
Тт КТСдФТс1 Р +1
Те Кс RH Tel Р
WD.c.o
рс ° Те КсНн TC1P где Кт - коэффициент обратной связи по току основного канала;
Tci be Тс ЭсЬсТт - постоянная времени интегрирования внешнего контура скорости основного канала регулирования;
be - коэффициент, учитывающий демпфирование колебаний внешнего контура скорости,
а дополнительный блок 13 регулирования скорости - интегродифференцирующее зве- но с передаточной функцией
2
ш ГР Тт Tc1 p +1 Wp.c-д. (Р)
Д ТС1 Р + 1
где Гс1 - acbc TV - постоянная времени интегрирования внешнего контура регулирования скорости дополнительного канала,
Таким образом, включение в электропривод постоянного тока по системе подчиненного регулирования дополнительных контура тока, четырех корректирующих звеньев и блока регулирования скорости по
0 5
0 5
0
5
0
5
0
зволяет повысить быстродействие, динамическую и статическую точность регулирования привода, обеспечивая при этом независимость действия каналов регулирования предлагаемого электропривода постоянного тока по системе подчиненного регулироозния как в рехиме малого, так и в режиме большого сигналов.
Формула изобретения Электропривод постоянного тока, содержащий электродвигатель постоянного тока, подключенный к выходу т-фазного вентильного преобразователя, в цепь управления которого включены последова- телоно соединенные блок задания скорости, первый сумматор, ругулятор скорости, второй сумматор и регулятор тока, при этом вторые входы первого и второго сумматоров соединены соответственно с выходами датчика скорости и датчика тока, включенног о между электродвигателем и т- фазным вентильным преобразователем, отличающийся тем, что, с целью повышения быстродействия и точности регулирования электропривода, в него введены быстродействующий источник напряжения, последовательно соединенные дополнительный блок регулирования скорости, первое корректирующее звено, третий сумматор и дополнительный регулятор тока, а также второй датчик тока и три корректирующих звена, причем вход дополнительного блока регулирования скорости подключен к выходу второго сумматора, выход дополнительного регулятора тока подключен к управляющему входу быстродействующего источника напряжения, выход которого включен параллельно выходу m-фазного вентильного преобразователя, второй датчик тока включен между быстродействующим источником напряжения и электродвигателем, а его выход соединен с вторым входом третьего сумматора и через второе корректирующее звено - с третьим входом второго сумматора, третье корректирующее звено включено между выходом регулятора тока и управляющим входом быстродействующего источника напряжения, а четвертое корректирующее звено - между выходом дополнительного регулятора тока и входом m-фазного преобразователя.
InZrCZ


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство регулирования тока | 1986 |
|
SU1332283A2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1975 |
|
SU699644A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
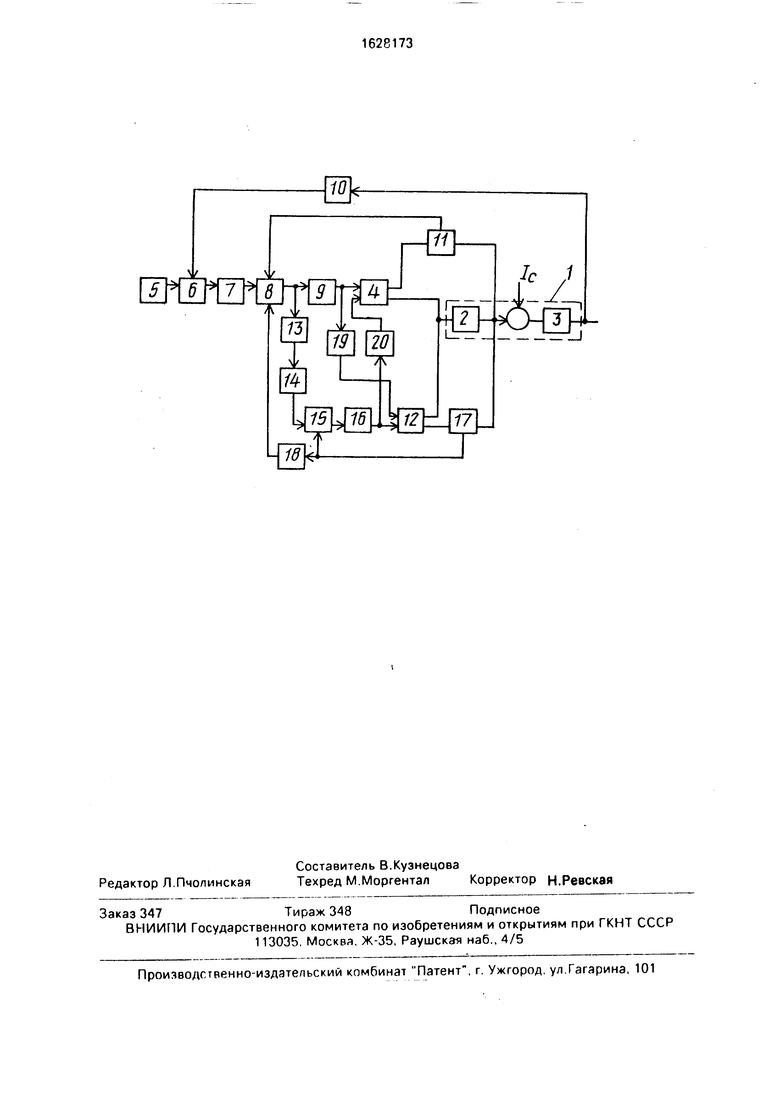
Изобретение относится к электротехнике, а именно к электроприводам постоянного тока, и может быть использовано для автоматического управления электроприводами с подчиненным регулированием параметров. Цель изобретения - повышение быстродействия и точности регулирования электропривода Для достижения цели в электропривод с подчиненным регулированием введен быстродействующий источник 12 напряжения с блоком 13 регулирования скорости и дополнительным регулятором 16 тока якоря в цепи управления. Электропривод содержит кроме того корректирующие звенья 14, 18. 19 и 20, первое из которых включено между блоком 13 регулирования скорости и дополнительным регулятором 16 тока, второе - между дополнительным датчиком 17 тока якоря и основным регулятором 9 тока якоря, третье - между выходом основного регулятора и быстродействующим источником 12 напряжения четвертое- между выходом дополнительного регулятора тока и тиристорным преобразователем. В данном устройстве обеспечивается повышение динамической и статической точности регулирования скорости. 1 ил. Ј
| Башарин А.В | |||
| и др | |||
| Управление электроприводами | |||
| - Л.: Энергоиздат, 1982, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лебедев Е.Д | |||
| и др | |||
| Управление вентильными электроприводами постоянного тока | |||
| - М.: Энергия | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
| З.ЗОв | |||
