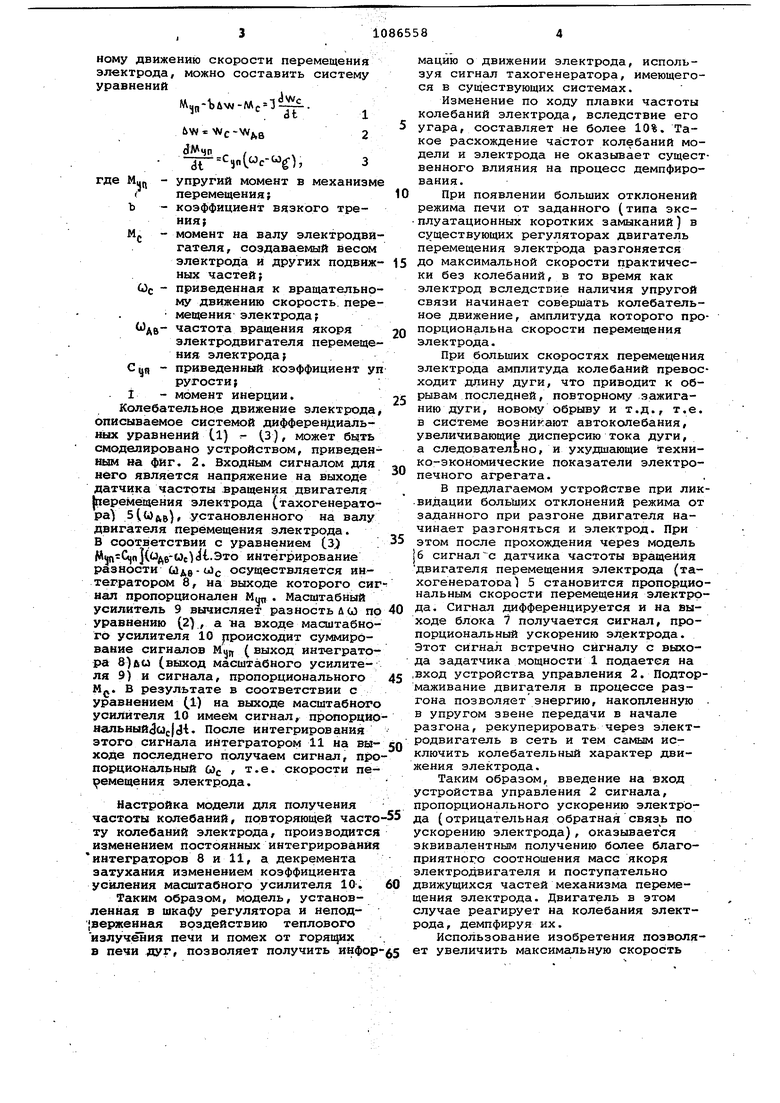
Изобретение относится к электротермии и может быть использовано в регуляторах электрического режима дуговых печей. Известны регуляторы дуговых пече в которых для улучшения динамически характеристик системы регулирования применен датчик смещения электрода относительно вертикальной стойки электрододержателя, выход которого подключен к одному из входов управляющего блока ij Для улучшения технико-экономичес ких показателей электропечного агре гата необходимо снижать дисперсию тока дуги, Ч.ТО может быть достигнуто за счет повышения скорости перемещения электрододержателя с электродом до 6 - 1О м/мин. Однако при скоростях, превышающи 2,5 м/мин, возникают колебаний рука ва электрододержателя из-за его огр ниченной механической жесткости, амплитуда которых пропорциональна скорости и массе электрода. При скоростях перемещения более 5 м/мин, амплитуда колебаний может достигнуть 30 - 70% длины дуги, что приводит к возникновению в системе регулирования автоколебаний, резкому увеличениюдисперсии тока дуги и следовательно, ухудшению показателе печи. При больших колебанияхконец электрода может окунаться в расплав ленный металл, неуглераживая его. Введение датчика смещения электрода позволяет получить в системе автоматического регулирования (упра ляющем блоке) сигнал, пропорциональ ный ускорению электрода, используемый для демпфирования механических колебаний электрода. Недостатками данного устройства являются также низкая надежность и помехозащищенность выходного сигнала (йтчика смещения, устанавливаемо го на консоли электрододержателя, где на датчик воздействуют высокие температуры и электрические помехи, создаваемые рабочими дугами печи. Сигнал датчика достигает величины нескольких десятков или сотен милли вольт и защита его от электрических помех, а затем и усиление до требуе |МОй величины связаны с большими тру ностями. Наиболее близким к изобретению по технической сущности является ус ройство, содержащее датчик скорости перемещения {например, тдкогенератор) , непосредственно связанный с исполнительным органом, совершающим упругие колебания, и дифференцирующий блок, вход которого соединен с тахогенераторЬм, а выход с одним из входов сиетепла управления исполнительным органом 21 . Недостатком такой системы, применительно к дуговым электроплавильным печам, является невозможность связать с колеблющимся электродом тахогенератор, являющийся источником достоверной информации о движении электрода, а следовательно, и невозможность получения сигнала, необходимого для демпфирования механических колебаний электрода с целью повышения максимальной скорости перемещения электрода, снижения дисперсии тока дуги и повышения технрко-экономических показателей электро печного агрегата. Цель изобретения - повышение точности определения ускорения электрода. Для достижения цели устройство дляопределения усйорения электрода регулятора дуговой печи, содержащее датчик скорости перемещения электрододержателя, выход которого связан с входом дифференцирующего блока, снабжено двумя интеграторами и двумя масштабными усилителями, выход датчика скоростл подключен к первым входам одного из интеграторов и масштабного усилителя, .вторые входы которых соединены друг с другом, а их выходы подключены к входам второго масштабного усилителя, третий вход которого соединен с задатчиком напряжения,, а выход - с входом второго интегратора, связанного выходом с входом дифференцирующего блока и вторыми входами первых интегратора и масштабного усилителя. На фиг. 1 изображена блок-схема одной фазы регулятора электрического режима дуговой печи; на фиг.2 схема устройства для определения ускорения электрсЬца. Регулятор дуговой печи содержит датчик мощности 1, устройство управления 2, усилитель мощности 3, двигатель пе Уемещения электрода 4, датчик частоты вращения 5 двигателя перемещения элейтрода. Устройство для определения ускорения электрода содержит датчик частоты вращения 5, электронную модель б, иммитирующую колебание электрода по частоте колебаний и декременту их затухания и дифференцирующий блок 7. В свою очередь электронная модель б состоит из интегратора 8, масштабного усилителя 9, второго масштабного усилителя 10, второго интегратора 11 и задатчика напряжения 12. Работа предлагаемого устройства состоит в следующем. Для механизма перемещения электрода с учетом диссипативных сил, которые можно представить в виде вязкого трения, пропорционального относительной скорости якоря электродвигателя и приведенной к вращательному движению скорости перемещения электрода, можно составить систему уравнений %-ЪллА(-ЛАс 3. о t uw dMtjp , ,,„((о,-(о), где Мцц - упругий момент в механизм ( перемещения; Ъ - коэффициент вязкого трения;М„ - момент на валу электродви гателя, создаваемый йесом электрода и других подвиж ных частей; С0(. - приведенная к вращательно му движению скорость, пере мещения-электрода; («)дв- частота вращения якоря электродвигателя перемеще ния: электрода; - приведенный коэффициент у ругости; ± - момент инерции. Колебательное движение электрода описываемое системой дифференциальных уравнений Cl) - (), может бь5ть смоделировано устройством, приведен ным на фкг, 2. Входным сигналом для него является напряжение на выходе датчика частоты вращения двигателя {перемещения электрода (тахогенарато раУ 5(), установленного на валу двигателя перемещения электрода. В соответствии с уравнением (3 M jn-C4n}()it-3To интегрирование разности Садв-а осуществляется интерратором 8, на выходе которого си нал пропорционален Mmi . Масштабный усилитель 9 вычисляет разность доз по уравнению (2), а на входе масштабного усилителя 10 ПРОИСХОДИТ суммирование сигналов Mijj, ( выход инт егратора 8)fici (выход масштабного усилителя 9) и сигнала, пропорционального Mg. В результате в соответствии с уравнением () на выходе масштабнсяо усилителя 10 имеем сигнал, протюрцио нальный(ЗЫсМ После интегрирования этого сигнала интегратором 11 на выходе последнего получаем сигнал, про порциональный QC г т.е. скорости пе1ремещения электрода. Настройка модели для получения частоты колебаний, повторяющей часто ту колебаний электрода, производится изменением постоянных интегрирования интеграторов 8 и 11, а декремента затухания изменением коэффициента усиления масштабного усилителя 10. Таким образом, модель, установленная в шкафу регулятора и непод{верженная воздействию теплового излучения печи и помех от горяв их в печи дуг, позволяет получить инфор мацию о движении электрода, используя сигнал тахогенератора, имеющегося в существующих системах. Изменение по ходу плавки частоты колебаний электрода, вследствие его угара, составляет не более 10%. Такое расхождение частот колебаний модели и электрода не оказывает существенного влияния на процесс демпфирования. При появлении больших отклонений режима печи от заданного (типа эксплуатационных коротких замыканий) в существующих регуляторах двигатель перемещения электрода разгоняется до максимальной скорости практически без колебаний, в то время как электрод вследствие наличия упругой связи начинает совершать колебательное движение, амплитуда которого пропорциональна скорости перемещения Электрода. При больших скоростях перемещения электрода амплитуда колебаний превосходит длину дуги, что приводит к обрывам последней, повторному зажиганию дуги, новому обрыву и т.д., т.е. в системе возникают автоколебания, увеличивающие дисперсию тока дуги, а следовательно, и ухудшающие технико-экономические показатели электропечного агрегата. В предлагаемом устройстве при ликвидации больших отклонений режима от заданного при разгоне двигателя начинает разгоняться и электрод. При этом после прохождения через модель |б сигнал с датчика частоты вращения двигателя перемещения электрода (тахогенератора 5 становится пропорциональным скорости перемещения электрода. Сигнал дифференцируется и на выходе блока 7 получается сигнал, пропорциональный ускорению эл.ектрода. Этот си:гнал встречно сигналу с выхода задатчика мощности 1 подается на .вход устройства управления 2. Подтормаживание двигателя в процессе разгона позволяетэнергию, накопленную . в упругом звене передачи в начале разгона, рекуперировать через электродвигатель в сеть и тем самым исключить колебательный характер движения электрода. Таким образом, введение на вход устройства управления 2 сигнала, пропорционального ускорению электрода (отрицательная обратная связь по ускорению электрода), оказывается эквивалентным получению более благоприятного соотношения масс якоря электродвигателя и поступательно движущихся частей механизма перемещения электрода. Двигатель в этом случае реагирует на колебания электрода, демпфируя их. Использование изобретения позволяет увеличить максимальную скорость
перемещения электродов электроплавильных печей до 10 м/мин против максимгшьно достигнутых 4-4,5 м/мин. Повышение скорости обеспечивает снижение дисперсии тока дуги на 20 ..,.«4«|. I «..-. ti-.j..
30%, позволяет сократить удельный расход электроэнергии на 10 - 15%, повысить производительность печи на 7 - 10% и уменьшить науглероживание металла. a
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический регулятор мощности дуговой электропечи | 1984 |
|
SU1197151A1 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
| Устройство для регулирования натяжения полосы в башенной печи | 1983 |
|
SU1104176A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО РЕЖИМА ДУГОВОЙ ПЕЧИ | 1968 |
|
SU221184A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГРЕБЕНЧАТЫМ ДВИГАТЕЛЕМ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2005 |
|
RU2282150C1 |
| СПОСОБ ПОДСТРОЙКИ РЕЗОНАНСНОЙ ЧАСТОТЫ ПОДВЕСА ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА С ГЛУБОКОЙ ОБРАТНОЙ СВЯЗЬЮ ПО СКОРОСТИ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2316731C1 |
| Устройство для стабилизации скорости подачи проволоки в механизме подачи проволоки электродуговой установки | 2023 |
|
RU2832031C1 |
| Регулятор мощности дуговой электропечи | 1981 |
|
SU1029432A1 |
| Система управления следящим приводом портала машины термической резки | 1990 |
|
SU1757811A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ ЭЛЕКТРОДА РЕГУЛЯТОРА ДУГОВОЙ ПЕЧИ, содержащее датчик скорости перемещения электрододержателя, выход которого связан с входом дифференцирующего блока, отличающееся тем, что, с целью повышения точности определения ускорения электрода.устройство снабжено двумд интеграторами и двумя масштабными усилителями, выход датчика скорости подключен к первым входам одного изинтеграторов и масштабного усилителя, вторые входы которых соединены друг с другом, а их выходы подключены к вх:одам второго масштабного усилителя, третий вход которого соединен с задатчиком напряжения, а выход - с входом второго интегратора, связанного ВБ1ХОДОМ с входсж дифференцирующего блока и вторыми входами первых интегратора и масштабного усилителя. 00 ю ел D1 эо
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ЭЛЕКТРОДОВ ДУГОВОЙ ЭЛЕКТРОПЕЧИ | 0 |
|
SU290485A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электротехническая промыпшенность | |||
| Сер | |||
| Электропривод, вып | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
