Изобретение относится к области приборостроения для биофизических и микробиологических исследований.
Известен микроманипулятор для излучения биопотенциалов биологических объектов, содержащий корпус, держатель с микроэлектродом, дисковьй пьезоэлемент, соединенный одной гранью с держателем микроэлектрода 1.
Этот микроманипулятор предназначен для локального воздействия на функционирующий микрообъект только при внутриклеточных микро электродных исследованиях и не может быть применен дляодновременного многоканального отведения био потенциалов от группы нейронов при экстраклеточных и внутриклеточных исследованиях.
Изобретение устраняет указанный недостаток тем, что устройство для изучения биопотенциалов биологических объектов содержит, по крайней мере, два микроманипул тора, установ ленных в корпусе, и блоки управления а каждый микроманипулятор содержит передаквций элемент, имеющий сферическую поверхность, биморфный пьезоэлемент, один конец которого свободно лежит на сферической поверхности пердающего элемента, и направляющую, в которой расположен держатель, причем блоки управления электрически связаны с дисковым и биморфным пьезоэлемеитами.
На фиг. 1 представлено предлагаемое устройство; на фиг. 2 - один из микроманипуляторов устройства, разрез.
Устройство для изучения биопотенциалов биологических объектов содержит, например, (см, фиг. 1) четыре микроманипулятора 1, которые размещены в корпусе 2,. Корпус закреплен в штативе 3. Система содержит блок управления; блоки 4 управления би- . морфными пьезоэлементами, блок 5 управления дисковыми пьезоэлементами, станок 6 с исследуемым биологическим объектом. Корпус 2 представляет собой ус,ченный конус, на котором размещены микроманинуляторы 1. Кажды микроманипулятор содержит держатель 7 с мйкроэлектроцом 8, дисковый пьезоэлемент 9, одна грань которого склеена с держателем 7 микроэлектрода о и опирается на держатель
10, а другая грань склеена с передающим элементом 11, имеющим сферическую пове-рхнкэсть} биморфный пьезоэлемент 12, один конец которого расположен в держателе 13, а другой свободно лежит на сферической поверхности передающего элемента 11. Держатель 10 вьтолнен в виде резиновой шайбы. Держатель 7 микроэлектрода 8 расположен в направляющей 14, котора запрессована в корпусе 2. Для предотвращения движения микроэлектрода 8 по дуге в направляющей 14 расположена пружкла 15. Блоки 4 и 5 электричеки связаны с пьезоэлементами 9 и 12. Устройство работает следующим образом. На штативе 3 производят предварительную установку микроманипуляторов 1 в рабочее положение и подводят микроэлектроды 8 в заданную область исследуемого биологического объекта, который находится в станке 6. С блока управления 4 подают напряжение на обкладки биморфных пьезоэлементов и начинается одновременное шаговое поступательное перемещение всех микроэлектродов 8 к выбранному участку биологического объекта, например головного мозгаt При приближении к функционирующему нейрону на микроэлектроде 8 возникает импульсный сигнал. Далее тактика поиска построена так, чтобы кончик микроэлектродов 8 можно бьшо подвести к функционирующим нейронам как можно ближе. После каждого очередного шага в блок управления поступает сигнал, которьп1 сравнивает по амплитуде с ранее прошедним. Таким образом, система вырабатывает направление движения микроэлектродов 8, которые приближаются к нейрону. Когда сигнал от нейрона достигает своего максимального значения, близкого к эталонному, прекращается подача напряжения с блока 4 управления, микроэлектроды 8 останавливаются и фиксируются в данной точке. Если микроэлектроды не одновременно обнаруживают функционирующие нейроны, то при остановке одних микроэлементов другие могут продолжать поиск.
После того как нейроны обнаружены, проводят внутриклеточное введение микроэлектродов 8. Для этого с блока 5 управления микроэлектродам 8 сообщают продольные ультразвуковые коле3. 9307954
бания для прокола клеточной мембраны менту три разнообразных вида движенейрона и для введения их внутрь ния: шаговое поступательное переметел нейронов. Биморфиые и дисковые щение и ультразвуковые продольные преобразователи сообщают мккроинстру- перемещения и колебания.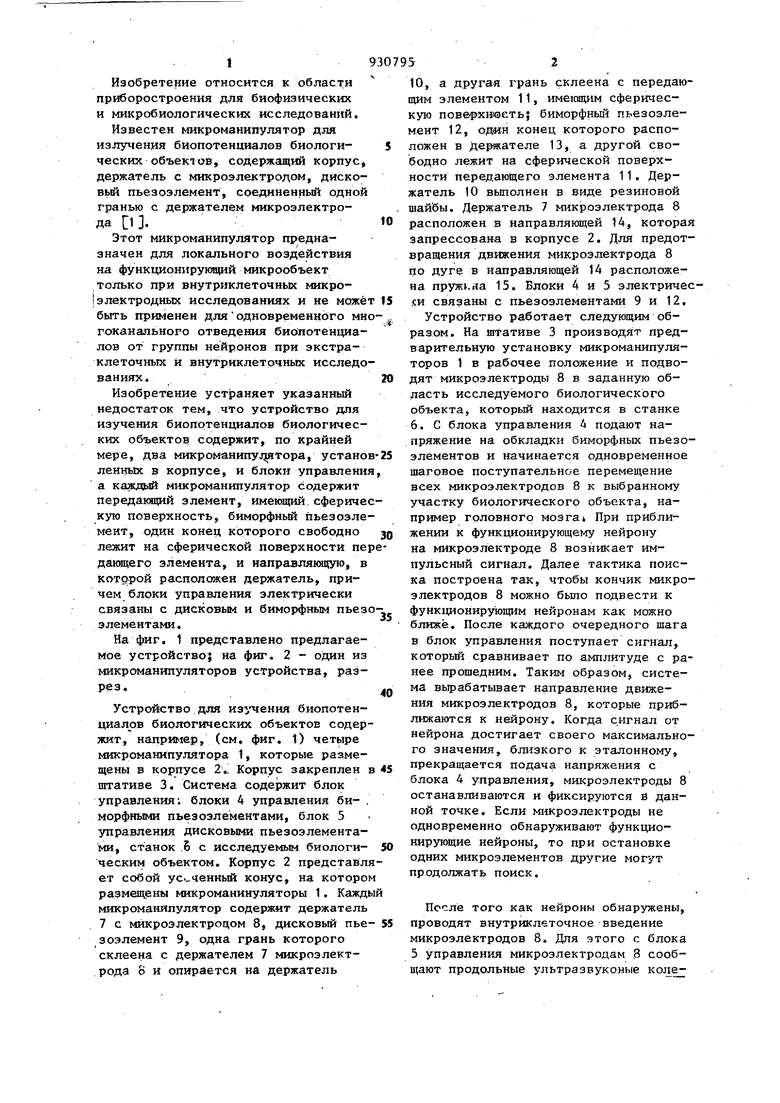
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМАНИПУЛЯТОР | 1970 |
|
SU260077A1 |
| Микроманипулятор для биологических исследований головного мозга животного | 1976 |
|
SU582089A1 |
| Микроманипулятор | 1981 |
|
SU959753A1 |
| Ультразвуковой микроманипулятор | 1975 |
|
SU547708A1 |
| Микроманипулятор | 1986 |
|
SU1404057A1 |
| УСТРОЙСТВО ДЛЯ ЛОКАЛЬНОГО ПОДВЕДЕНИЯ БИОЛОГИЧЕСКИ АКТИВНЫХ ВЕЩЕСТВ | 1995 |
|
RU2102750C1 |
| Пьезоэлектрический микроманипулятор для погружения электрода в биологическую ткань | 1984 |
|
SU1377032A1 |
| Микроманипулятор для биологических исследований | 1973 |
|
SU459330A1 |
| Микроманипулятор | 1980 |
|
SU960004A1 |
| КАМЕРА ДЛЯ ЭЛЕКТРОФИЗИОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2175349C1 |
УСТРОЙСТВО ДЛЯ ИЗУЧЕНИЯ БИОПОТЕНЦИАЛОВ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ, содержащее корпус, держатель с микрозлектродом, дисковый пьезоэлемент, соединенный одной гранью с держателем микроэлектрода, о кт ли чающееся тем, что, с целью обеспечения одновременного многоканального отведения биопотенциалов от группы нейронов при экстраклеточных и внутриклеточных исследованиях, оно содержит, по крайней мере, два микроманштулятора, установленных в корпусе, и- блоки управления ими, а казкдый микроманипулятор содержит передающий элемент, имеющий сферическую поверхность, биморфный пьезоэлемент, один конец которого свободно лежит на сферической поверхности передающего-элемента, и направляющую, в которой расположен держатель, причем блоки управления электрически связаны с диско- . вым и биморфным пьезоэлементами. W со со о м со СП
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ультразвуковой микроманипулятор | 1975 |
|
SU547708A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
