(54) УСТАНОВКА ДЛЯ НАЛОЖЕНИЯ ПРОТЕКТОРА ЛЕНТОЧКОЙ ,1 ..: Изобретение относится к шинореМонтной промышленности .и может испо зоваться на шиноремонтных заводах. По основному авт.св. № 368081 из вестна установка для наложения прот тора ленточкой, включающая червячны пресс с формующей головкой , систему отклоняющих роликов, механизмы фиксации ленты на покрышке и вращения ее вокруг своей оси, механизм азиму тального перемещения покрышки спрограммным устройством и следящее устройство, электрически соединенное с программным устройством механизма азимутального перемещения и механизмом фиксации ленты через бло ки сравнения и усиления,, соединенно с приводом механизма азимутального перемещения 1. В этой установке не всегда уй. ся получить покрьшжи с постоянной геометрией наложенного протектора, так как существенное влияние оказывает неточность ручной установки ме ханизмов продольного суппорта и, следовательно, совмещение центров профилей каркасов покрышек с неподвижной оЬью, представляющей собой центр вращения механизма азимутального перемещения. Такая ориентировк необходима для получения правильной геометрии.наложения протекторов в различных зонах пОкрьпики от неподвижной оси механизма азимутального перемещения в. ту иЛи другую сторону, а соответственно от заплечевой или от предплечевой зон и, следовательно, слой протектора будет распределен на большей или меньшей площадях профиля покрышки. . Точность ручной установки,продольного суппорта для каждого типоразмера, покрышки зависит не только от квалификации и ежесменного психологического состояния, но и от физической подготовки обслуживающего персонала, так как значительность ;пербдвигаёмых. масс продольного суппорта (на суппорте установлена стойка и барабан с покрышкой) требует приложения значительных усилий, это вызывает настоятельную потребность в автоматизации установкимеханизмов продольного суппорта. Целью изобретения является обеспечение автоматической установки продольного суппорта в заданную позиЦию.: Поставленная цель достигается тем, что установка ддя наложений про.тектора ленточкой снабжена электроеханической системой программного управления продольным суппортам, содержащей за 1ающий программный эУтёент с носителем программы, считывающую головку и исполнительный орган , состоящий из связанного с задащим программным элементом шагового,, вигателя, винта контроля положения суппорта, гайки, усилителей, электроконтактного датчика рассогласования по положению с контактами усилителей и электрически связанных с шаговым вигателем электромагнитных муфт ля соединения с электродвигателем еремещения продольного суппорта.
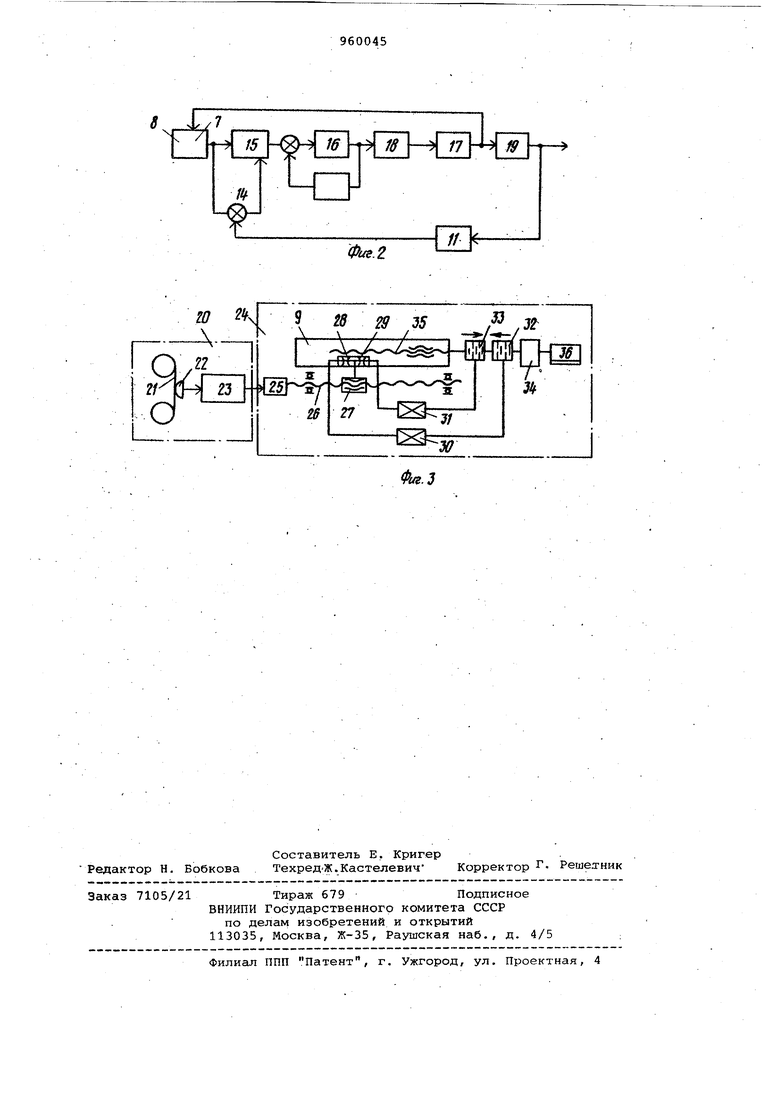
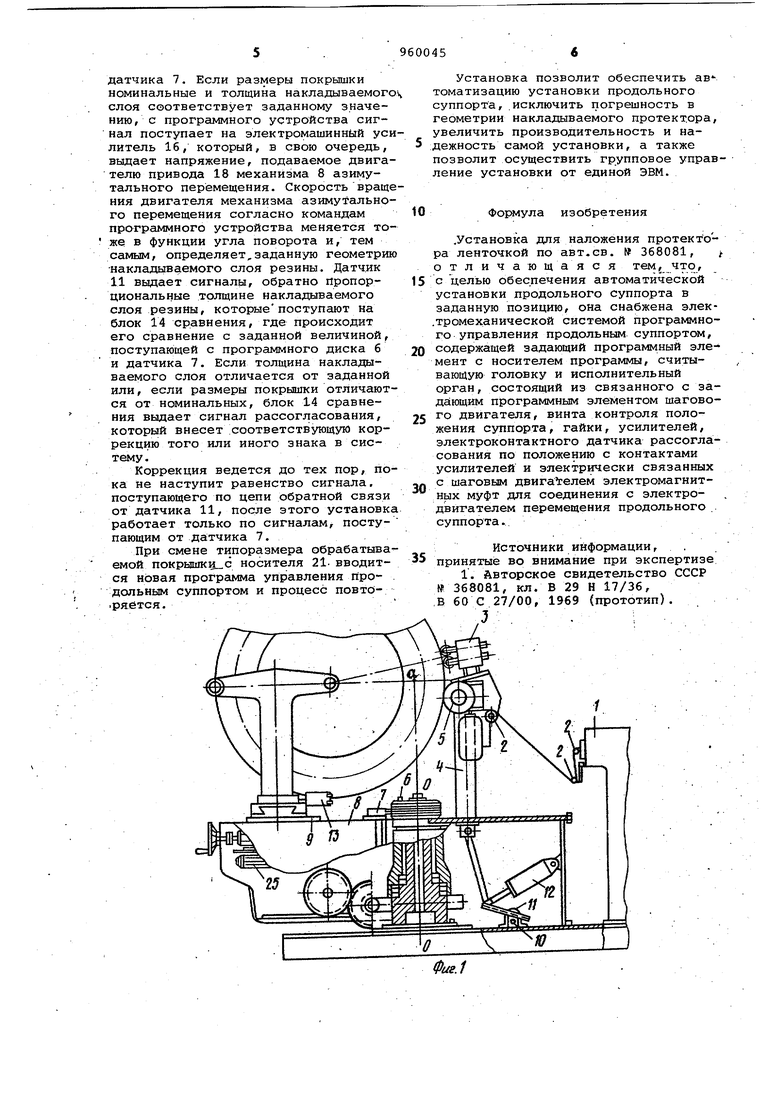
На фиг. 1 изображена предлагаемая становка, вид сбоку; на фиг. 2 функциональная структурная схема следящая системы автоматического ре гулирования на фиг. 3 - принципиальная схема электромеханической систе:мы программного управления проольным суппортом.
Уставка включает червячный пресс 1 с формующей головкой, систему отклоняющих роликов 2, служащих для . направления ленточки, механизм 3 фиксации ленточки на покрышке, установленный на рычаге 4, ролик 5 для вращения покрышки,- программное устройство, содержащее программный диск Б, взаимодействующий с датчиком 7, механизм 8 азимутального перемещения , на котором установлен продольный суппорт 9, устройство 10, преобразующее перемещение рычага 4 в перемещение датчика 7, выполненное в виде рейки и нескольких шестерен (не показаны), соединенных с датчиком 11, пневмоцилиндр 12, фиксатор 13, блок 14 ср1авнения заданной величины и регулируемой, электронный усилитель 15, электромашинный усилитель 16 г редуктор 17, служащий для связи программного устройства и привода 18 механизма 8 азимутального перемещения.. Датчик 11 преобразует отклонение фактических размеров обрабатываемой покрышки 19 от номинальных в электрический сигнал.
Установка содержит электромеханическую систему программного управления продольным суппорте 9, состоящей из задающего программного элемента 20 с носителем 21..программы, считывающую головку 22, блок 23 управления и исполнительного органа
24,содержащего шаговый двигатель
25,винт 26 контроля положения суппорта, гайку 27, электроконтактный датчик рассогласования по положению с контактами 28 и 29,.усилитель 30 и 31, электромагнитный муфт
и 33, взаимодействующих через коробку 34 передач о винтом 35 продольного суппорта 9 и электродвигателя 36.
. . Установка работает следующим образом.
Подготовленный каркас покрышки 19 Одевается на бараб|1Н и поддувается. Механизм 8 азимутального перемещения ставится в исходное положение. Датчик 7 ставится напротив программного диска 6, соответствующего типоразмеру покрышки. Рычаг 4с роликом.5 находится в отведенном положении.
o Сигналы с носителя 21 программы,
на котором записана программа управ. ления продольнь1м суппортом 9, соответствующая совмещению центра «а профиля обрабатываемого типоразмера
5 покрышки 19 с неподвижной осью 0-0, вокруг которой механизм 8 азимутального перемещения осуществляет свое вращательное движение. Программа снимается при помощи считывающей головки 22 и поступает в блок 23 управления шаговым двигателем 25. Шаговый двигатель 25 вращает винт 26 контроля положения, на гайке 27 которого установлен электроконтактный датчик рассогласования по положению с контактами 28 и 29. При перемещении гайки 27 в ту или другую сторону замыкается один из контактов (28 или 29), расположенных на входах усилителей 30 и 31, управляющих включением электромагнитных муфт 32 и 33. Электромагнитные муфоъ через коробку 34 передач подключают винт 35 продольного суппорта 9 к силовому электродвигателю 36, который перемещает продольный суппорт 9 до тех пор, пока один из ранее замкнутых контактов 28 Или 29-не разомкнется, что соответствует отработке программы, заданной осителеМ 21. Как только контакт 28 или 29 замкнется,
усилители 30 и 31 обесточатся и электромагнитные муфты отсоединят винт 35 продольного суппорта 9 от силового электродвигателя 36. Разогретая
с резиновая смесь, выходя из червячного пресса 1 через ролики 2, подводится к каркасу покрышки 19 и одновременно подводится рычаг 4, который в то же время служит и датчиком геометрии намотанной покрышки, механизм 8 поворачивается и,происходит процесс наложения протектора по программному диску. ,
Рычаг 4 контролирует при этом отклонения покрышки от номинального
5 размера. Устройство 1 (Т передает колебания рычага датчику 11. Датчик 7, приводимый в действие от механизма азимутального перемещения через редуктор 17, за время технического
0 процесса постоянно вьщает электрический сигнал, который является функцией от угла поворота механизма азимутального перемещения. Эта функ|Ция задается конфигурацией программно5 ГО диска 6, воздействующего на щуп датчика 7. Если размеры покрышки номинальные и толщина накладываемог слоя соответствует заданному значению, с программного устройства сигнал поступает на электромашиннйй ус литель 16, который, в свою очередь, выдает напряжение, подаваемое двига телю привода 18 механизма 8 азимутального перемещения. Скорость вращ ния двигателя механизма азимутально го перемещения согласно командам программного устройства меняется то же в функции угла поворота и, тем самым, определяет,заданную геометрию накладываемого слоя резины. Датчик 11 выдает сигналы, обратно Пропорциональные толщине накладываемого слоя резины, которыепоступают на блок 14 сравнения, где происходит его сравнение с заданной величиной, поступающей с программного диска 6 и датчика 7. Если толщина накладываемого слоя отличается от заданной или, если размеры покрышки отличаются от номинальных, блок 14 сравнения выдает сигнал рассогласования, который внесет соответствующую коррекцию того или иного знака в систему. Коррекция ведется до тех пор, пока не наступит равенство сигнала. поступающего по цепи обратной связи от датчика 11, после этого установка работает только по сигналам, поступающим от датчика 7. При смене типоразмера обрабатываемой покрышк11 с носителя 21. вводится новая программа управления продольным суппортом и процесс повто- .ряется.. /Г. Установка позволит обеспечить автоматизацию установки продольного суппорта, .исключить погрешность в геометрии накладываемого протектора, увеличить производительность и надежность самой установки, а также позволит осуществить групповое управление установки от единой ЭВМ. Формула изобретения .Установка для наложения протектора ленточкой по авт.св. № 368081, , отличающаяся TeMj что, с целью обеспечения автоматической установки продольного суппорта в заданную позицию, она снабжена элек.тромеханической системой программного управления продольным, суппортом, содержащей задающий программный элемент с носителем программы, считывающую головку и исполнительный орган, состоящий из связанного с задающим программным элементом шагового двигателя, винта контроля положения суппорта, гайки, усилителей, электроконтактного датчика рассогласования по положению с контактами усилителей и электрически связанных с шаговым двигателем электромагнитных муфт для соединения с электродвигателем перемещения продольного суппорта. Источники информации, ринятые во внимание при экспертизе 1. Авторское свидетельство СССР 368081, кл. В 29 Н 17/36, 60 С 27/00, 1969 (прототип). V .
w 
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для наложения протектора ленточкой | 1980 |
|
SU899365A2 |
| Устройство для наложения протектора ленточкой | 1979 |
|
SU856849A2 |
| Установка для наложения протектора ленточкой | 1980 |
|
SU889472A2 |
| Установка для наложения протектора ленточкой | 1982 |
|
SU1031753A2 |
| Установка для наложения протекторалЕНТОчКОй | 1979 |
|
SU835821A2 |
| ВСЕСОЮЗНАЯ шт •^^-1^.:г-.Л7Г;:.ИДЙ- БИБЛИОТЕКА [ | 1973 |
|
SU368081A1 |
| УСТАНОВКА ДЛЯ НАЛОЖЕНИЯ ПРОТЕКТОРА ЛЕНТОЧКОЙ | 1971 |
|
SU297497A1 |
| Способ формирования протектора намоткой ленточки и установка для его осуществления | 1978 |
|
SU1019996A3 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ БОКОВИН И ПРОТЕКТОРА ПОКРЫШЕК УЗКОЙ ЛЕНТОЙ | 1991 |
|
RU2005624C1 |
| Устройство для наложения протектора ленточкой | 1980 |
|
SU897578A1 |