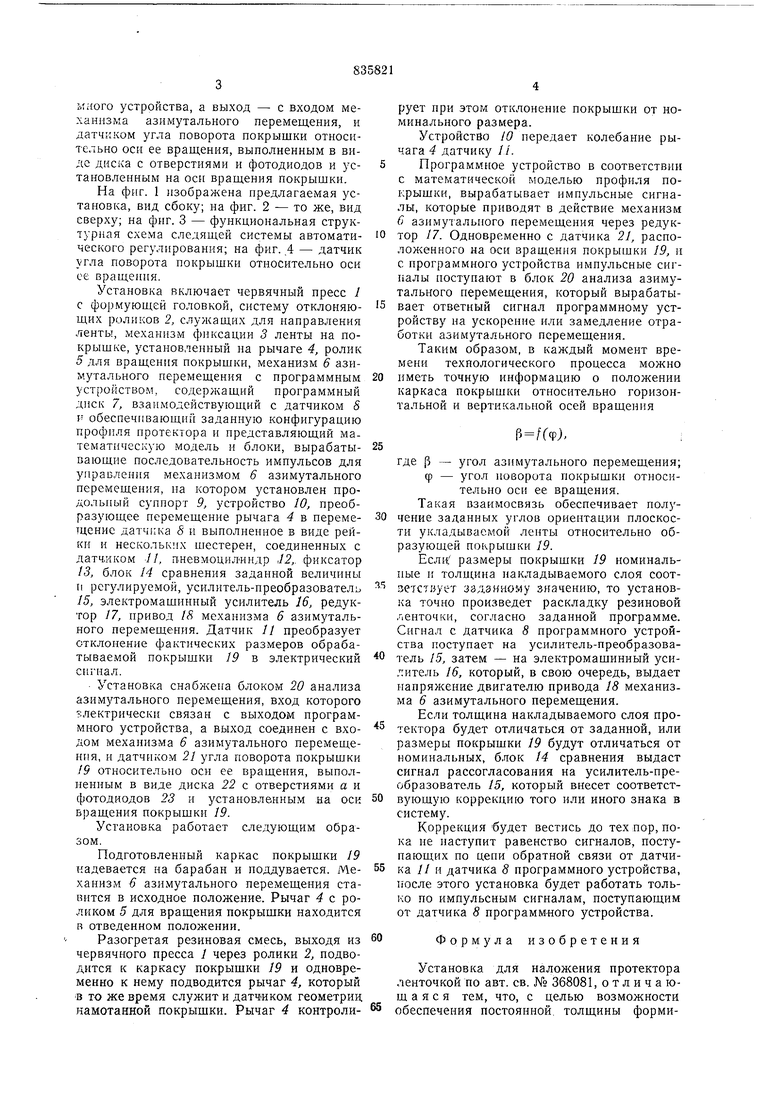
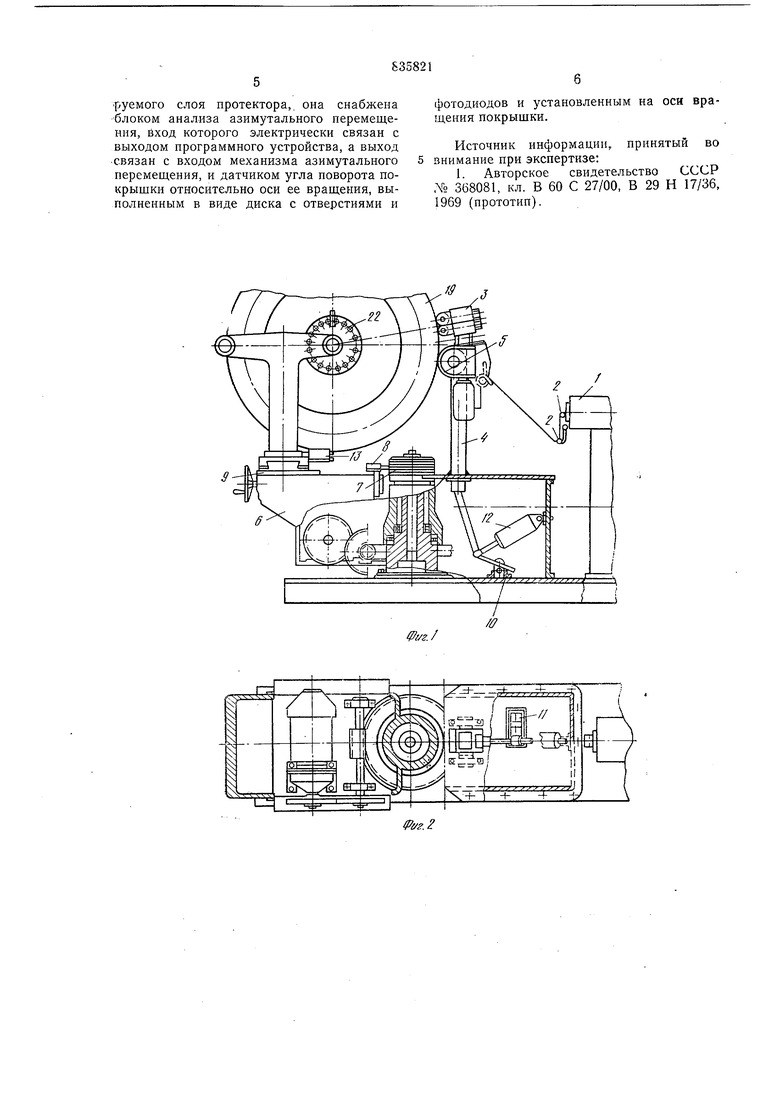
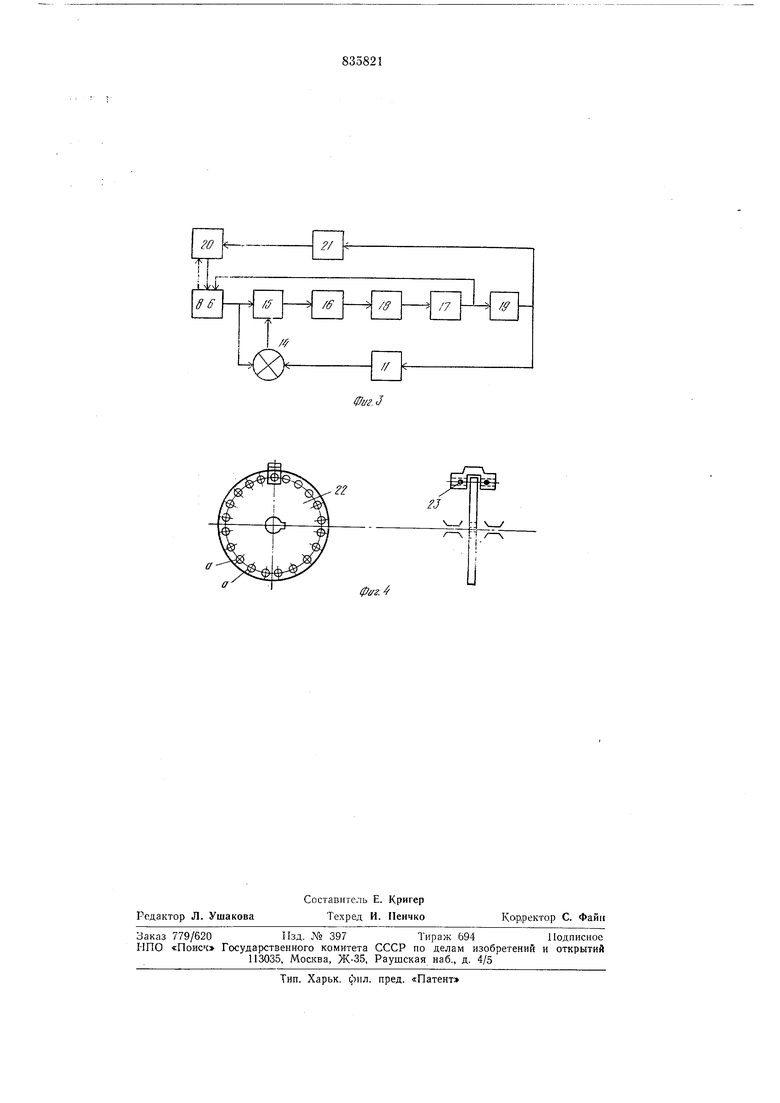
много устройства, а выход - с входом механизма азимутального перемещения, и датчиком угла поворота покрышки относительно оси ее вращения, выполненным в виде диска с отверстиями и фотодиодов и установленным на оси вращения покрышки. На фиг. 1 изображена предлагаемая установка, вид сбоку; иа фиг. 2 - то же, вид сверху; на фиг. 3 - функциональная струкTypiiaH схема следящей системы автоматического регулирования; на фиг. ,4 - датчик угла поворота покрышки относительно оси ее вращения. Установка включает червячный пресс 1 с формующей головкой, систему отклоняющих роликов 2, служащих для направления .ленты, механизм фиксации 3 ленты на покрышке, установленный на рычаге 4, ролик 5 для вращеиия покрышки, механизм 6 азимутального перемещения с программным устройством, содержащий программный диск 7, взаимодействующий с датчиком 5 F обеспечивающий заданную конфигурацию профиля протектора и представляющий математическую модель и блоки, вырабатыпающие последовательность импульсов для управления механизмом 6 азимутального перемещения, на котором установлен продольный суппорт 9, устройство 10, преобразующее перемещение рычага 4 в перемещение датчика 5 и выполненное в виде рейки и нескольких шестерен, соединенных с датчиком 11, пневмоцилиидр J2,. фиксатор 13, блок 14 сравнения заданной величины II регулируемой, усилитель-иреобразователь 15, электромащинный усилитель 16, редуктор 17, привод 18 механизма 6 азимутального перемещения. Датчик // преобразует отклонение фактических размеров обрабатываемой покрыщки 19 в электрический сигиал. - Установка снабжена блоком 20 анализа аз и ментального перемещения, вход которого электрически связан с выходом программного устройства, а выход соединен с входом механизма 6 азимутального перемещения, и датчиком 21 угла поворота покрышки /9 относительно оси ее вращения, выполненным в виде диска 22 с отверстиями а и фотодиодов 23 и установленным на оси вращения покрышки 19. Установка работает следующим образом. Подготовленный каркас покрыщки 19 надевается на барабан и поддувается. Meханизм 6 азнмутальиого перемещения ставится в исходное положение. Рычаг 4 с роликом 5 для вращения покрышки находится в отведенном положении. Разогретая резиновая смесь, выходя из червячного пресса 1 через ролики 2, подводится к каркасу покрышки 19 и одновременно к нему подводится рычаг 4, который в то же время служит и датчиком геометрид намотанной покрышки. Рычаг 4 контролирует нри этом отклонение покрышки от номинального размера. Устройство W передает колебание рычага 4 датчику //. Программное устройство в соответствии с математической моделью профиля покрышки, вырабатывает импульсные сигналы, которые приводят в действие механизм 6 азимутального перемещения через редуктор /7. Одновременно с датчика 21, расположенного на оси вращения покрышки 19, и с программного устройства импульсные сигналы поступают в блок 20 анализа азимутального перемещения, который вырабатывает ответный сигнал программному устройству на ускорение или замедление отработки азимутального перемещения. Таким образом, в каждый момент времени технологического процесса можно иметь точную информацию о положении каркаса покрышки относительно горизонтальной и вертикальной осей вращения ) где р - угол азимутального перемещения; Ф - угол поворота покрышки относительно оси ее вращения. Такая взаимосвязь обеспечивает получение заданных углов ориеитации плоскости укладываемой ленты относительно образующей покрышки 19. Если размеры покрышки 19 номинальные и толщина накладываемого слоя соот.четствует заданному значению, то установка точно произведет раскладку резиновой ленточки, согласно заданной программе. Сигнал с датчика 8 нрограммного устройства поступает на усилитель-преобразователь 15, затем - на электромашинный усилитель 16, который, в свою очередь, выдает напряжение двигателю привода 18 механизма 6 азимутального перемещения. Если толщина накладываемого слоя протектора будет отличаться от заданной, или размеры покрышки 19 будут отличаться от номинальных, блок 14 сравнения выдаст сигнал рассогласования на усилитель-преобразователь 15, который внесет соответствуюшую коррекцию того или иного знака в систему. Коррекция будет вестись до тех лор, пока не наступит равенство сигналов, постунающих по цепи обратной связи от датчика // и датчика 5 программного устройства, после этого установка будет работать только по импульсным сигналам, поступающим от датчика 8 программ-ного устройства. Формула изобретения Установка для наложения протектора ленточкой по авт. св. JST 368081, отличающаяся тем, что, с целью возможности обеспечения постоянной, толщины формируемого слоя протектора,, она снабжена блоком анализа азимутального перемещения, вход которого электрпчески связан с выходом программного устройства, а выход связан с входом механизма азимутального перемещения, и датчиком угла поворота покрышки относительно оси ее вращения, выполненным в виде диска с отверстиями и
фотодиодов и установленным на оси вращения покрышки.
Источник информации, принятый во внимание при экспертизе:
1 Авторское свидетельство СССР .YO 368081, кл. В 60 С 27/00, В 29 Н 17/36, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для наложения протектора ленточкой | 1979 |
|
SU856849A2 |
| Установка для наложения протектора ленточкой | 1980 |
|
SU899365A2 |
| Установка для наложения протектора ленточкой | 1980 |
|
SU889472A2 |
| Установка для наложения протектора ленточкой | 1981 |
|
SU960045A2 |
| Установка для наложения протектора ленточкой | 1982 |
|
SU1031753A2 |
| ВСЕСОЮЗНАЯ шт •^^-1^.:г-.Л7Г;:.ИДЙ- БИБЛИОТЕКА [ | 1973 |
|
SU368081A1 |
| УСТАНОВКА ДЛЯ НАЛОЖЕНИЯ ПРОТЕКТОРА ЛЕНТОЧКОЙ | 1971 |
|
SU297497A1 |
| Способ формирования протектора намоткой ленточки и установка для его осуществления | 1978 |
|
SU1019996A3 |
| УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ ПРОТЕКТОРА | 1973 |
|
SU364469A1 |
| УСТРОЙСТВО для НАЛОЖЕНИЯ ПРОТЕКТОРА | 1973 |
|
SU361103A1 |
фаг.
