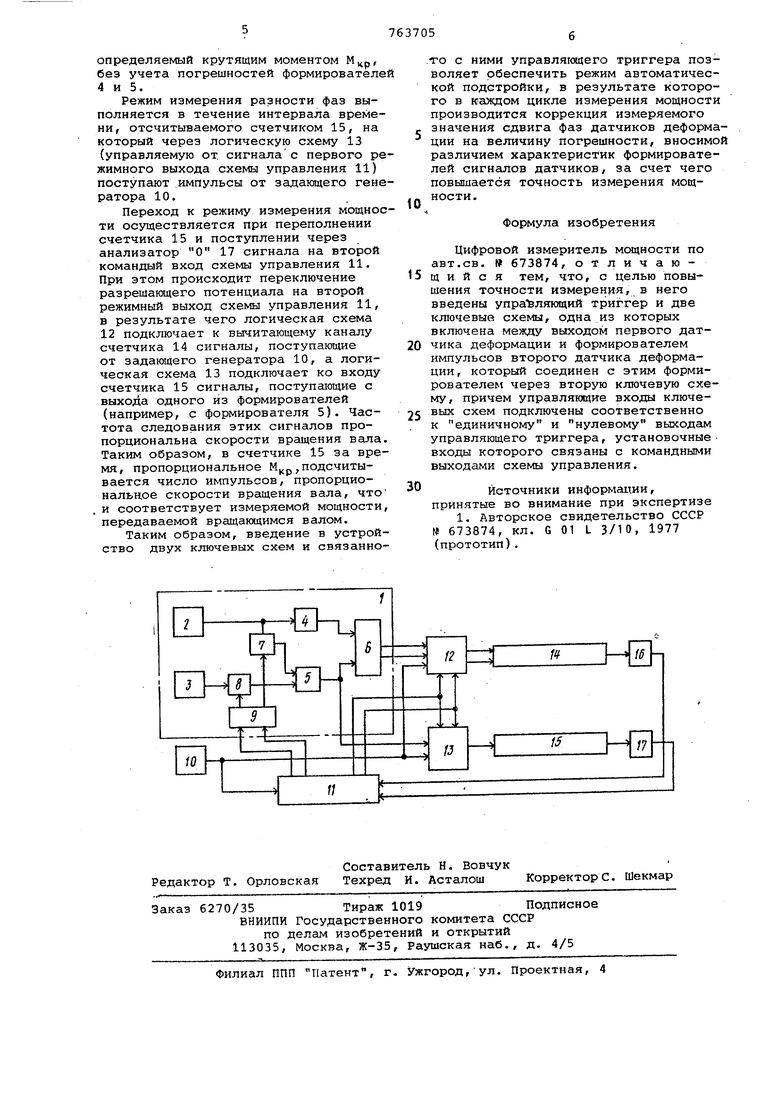
Изобретение относится к контрольно-измерительной технике и предназна чено для использования в дискретных измерителях мощности, передаваемой вращающимися валами. В основном авт.св. № 673874 описа цифровой измеритель мощности,содержащий измеритель деформации, датчики деформации, формирователи импульсов и схему управления l . Недостатком этого устройства .является отсутствие в нем схемы, обеспечивающей устранение погрешностей, вносимых формирователями сигналов датчиков деформации вала. Вследствие малой величины деформации (угла закручивания) вала, передающего крутящий..момент, погрешности формирователей, преобразующих в импульснуй форму сигналы двух датчиков деформации закрепленных в контрольных сечениях вала, и изменение этих погрешностей во времени в результате уходов параметров формирователей (по произвольному закону) существенно снижают точность измерения угла закручивания вала и, следовательно, точность измерения мощности. Цель изобретения - повышение точности измерения мощности. Указанная цель достигается тем, что в измеритель введены управляющий триггер и две ключевые схемы, одна из которых включена между выходом первого датчика деформации и формирователем импульсов второго датчика деформации, который соединен с этим фрЕ трователем через вторую ключевую схему, причем управляющие входы ключевых схем подключены соответственно к единичному и нулевому выходам управляющего триггера, установочные входы которого связаны с- командными выходами схемы управления. На чертеже представлена функциональная схема измерителя. В состав измерителя входят: фазовый измеритель деформации 1, включакяций в себя датчики деформации 2 и 3, формирователи 4 и 5 импульсов, фазовый дискриминатор б, ключевые cxeNM 7 и 8 и управляющий триггер 9, задающий генератор 10, схема управления 11, логические схемы 12 и 13, реверсивный счетчик 14 измерения деформации, счетчик 15 результата, анализаторы О 16 и 17 Выход датчика деформации 2 соединен со входом формирователя 4 и инфо мационным входом ключевой схемы 7. Выход датчика деформации 3 через информационный вход ключевой схемы 8 связан со входом формирователя 5, к которому также подключен и выход ключевой схемы 7. Управлянлцие входы ключевых схем 7 и 8 соединены соответственно с единичнЕлм и нулевым выходами управляющего триггера 9, чьи установочные входы связаны с пер вым и вторым командными выходами схе мы управления 11. Выходы формировате лей 4 и 5 подключены ко входам фазового дискриминатора б, знаковый выход которого связан со знаковым входом логической схемы 12, а его информационный выход связан с измерительным входом схемы 12. Измерительный вход логической схемы 13 сое динен с выходом одного из формирователей импульсов (например, формирователя 5). Синхронизирующие входы схем 11-13 подключены к выходу задаю щего генератора 10. Первый и второй режимные выходы схем управления 11 связаны соответственно с первыми и вторыми режимными входами логических схем 12 и 13. Первый и второй выходы логической схемы 12 соединены соответственно с суммирующим и вычитающим входами счетчика 14. Выход ло гической схемы 13 подключен ко входу счетчика 15. Выходы счетчиков 14 и 15 через анализаторы О 16 и 17 связаны с первым и вторым командными входами схемы управления 11. Работа цифрового измерителя мощности заключается в том, что в каждо цикле измерения мощности осуществляе ся автоматическая коррекция измеряемой величины сдвига фаз между сигналами с выходов датчиков деформации (характеризующего величину крутящего момента) на величину, соответствующую разности фаз (погрешности) между формирователями, путем подключ ения с помощью ключевых схем сигнала от одного из датчиков деформации ко входам обоих формирователей импульсо Устройство работает следующим образом. Перед началом каждого цикла измерения мощности реализуется режим под строЧки. По сигналу с первого команд ного выхода схемы управления 11 триг гер I Останавливается в единичное состояние, в результате чего ключевая схема 8 закрывается, а схема 7 открывается, и выходной от датчика деформации 2 подключается ко входам обоих формирователей 4 и 5, На выходах формирователей 4 и 5 получаемые сигналы, в зависимости от различия характеристик формирователей, могут иметь некоторую раз .ность фaзiiT, величина и знак кото рой определяются фазовым дискриминатором б.. Длительность импульсного сигнала на информационном выходе дискриминатора 6 равна величине разности фаз, а высокий или низкий потенциал на знаковом выходе дискриминатора б соответствует положительному или отрицательному знаку разности фаз. В режиме подстройки сформированный на первом режимном выходе схемы управления 11 потенциал подается на первый режимный вход логической схемы 12. При этом логическая схема 12 с помощью импульсов задающего генератора 10 (период следования которых Tj.p) преобразует поступающие на ее измерительный вход сигналы от фазового дискриминатора б в пачки импульсов, которые в зависимости от знака разности фаз подаются на суммирующий или вычитающий вход реверсивного счетчика 14. В течение интервала времени, отводимого на режим подстройки (равного по длительности рабочему режиму измерения разности фаз датчиков 2 и 3), в реверсивном счетчике 14 определяется число импульсов опорной частоты, пропорциональное величине и знаку сдвига фаз на выходах формирователей 4 и 5, вызванного погрешностями формирователей. При этом знак этого числа противоположен знаку разности фаз, т.е. в случае положительного знака разности фаз счет импульсов в счетчике 14 идет по вычитающему каналу, а в случае отрицательного знака - по суммирующему каналу. Таким образом, в результате счета в режиме подстройки число в счетчике 14 характеризует величину - ( i лТф ) , В рабочем режиме измерения разности фаз по сигналу со второго командного выхода схемы управления 11 триггер 9 устанавливается в нулевое состояние, в результате чего ключевая схема 7 закрывается, а схема 8 открывается и на входы формирователей 4 и 5 поступают соответствующие сигналы от датчиков деформации 2 и 3. При этом измеряется реальный сдвиг фаз между датчиками 2 и 3, определяемый как крутящим моментом, так и существующими погрешностями, вносимыми, формирователями, т.е. кр- qp Так как импульсы, характеризующие эту величину, суммируются с содержи.мым счетчика 14, полученным в режиме подстройки, то в результате в счетчике 14 будет число импульсов, пропорциональное величине 4iAV( Эта величина характеризует только сдвиг фаз датчиков деформации 2 и 3,
определяемый крутящим моментом М, без учета погрешностей формирователе 4 и 5.
Режим измерения разности фаз выполняется в течение интервала времени, отсчитываемого счетчиком 15, на который через логическую схему 13 (управляемую от. сигнала с первого режимного выхода схемы управления 11) поступают импульсы от задающего генератора 10.
Переход к режиму измерения мощности осуществляется при переполнении счетчика 15 и поступлении через анализатор О 17 сигнала на второй командый вход схемы управления 11. При этом происходит переключение разрешающего потенциала на второй режимный выход схемы управления 11, в результате чего логическая схема 12 подключает к вычитающему каналу счетчика 14 сигналы, поступающие от задающего генератора 10, а логическая схема 13 подключает ко входу счетчика 15 сигналы, поступающие с выхода одного из формирователей (например, с формирователя 5). Частота следования этих сигналов пропорциональна скорости вращения веша. Таким образом, в счетчике 15 за время, пропорциональное М подсчитывается число импульсов, пропорциональное скорости вращения вала, что и соответствует измеряемой мощности, передаваемой вращающимся валом.
Таким образом, введение в устройство двух ключевых схем и связанното с ними управлягощего триггера позволяет обеспечить режим автоматической подстройки, в результате которого в каждом цикле измерения мощности производится коррекция измеряемого значения сдвига фаз датчиков деформации на величину погрешности, вносимой различием характеристик формирователей сигналов датчиков, за счет чего повьплается точность измерения мощности.
0
Формула изобретения
Цифровой измеритель мсмцности по авт.св. 673874, отличаю 5 щ и и с я тем, что, с целью повышения точности измерения, в него введены упрайдякнций триггер и две ключевые схемы, одна из которых включена между выходом первого датчика деформации и формирователем импульсов второго датчика деформации , который соединен с этим формирователем через вторую ключевую схему, причем управляющие входы ключевых схем подключены соответственно к единичному и нулевому выходгил управляющего триггера, установочные входы которого связаны с командными выходами схемы управления.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 673874, кл. G 01 L З/Ю, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель мощности | 1983 |
|
SU1081447A1 |
| Измеритель мощности | 1980 |
|
SU960556A1 |
| Измеритель мощности | 1983 |
|
SU1093925A1 |
| Цифровой измеритель мощности на валу | 1980 |
|
SU901860A1 |
| Устройство для измерения активной мощности | 1990 |
|
SU1781628A1 |
| Цифровой измеритель мощности | 1977 |
|
SU673874A1 |
| Дискретный измеритель мощности | 1977 |
|
SU690339A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 1993 |
|
RU2038614C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 2011 |
|
RU2492505C1 |
| Измеритель мощности | 1977 |
|
SU711389A1 |
