(54) ЗАХВАТ ДЛЯ ЛИСТОВЫХ МАТЕРИАЛОВ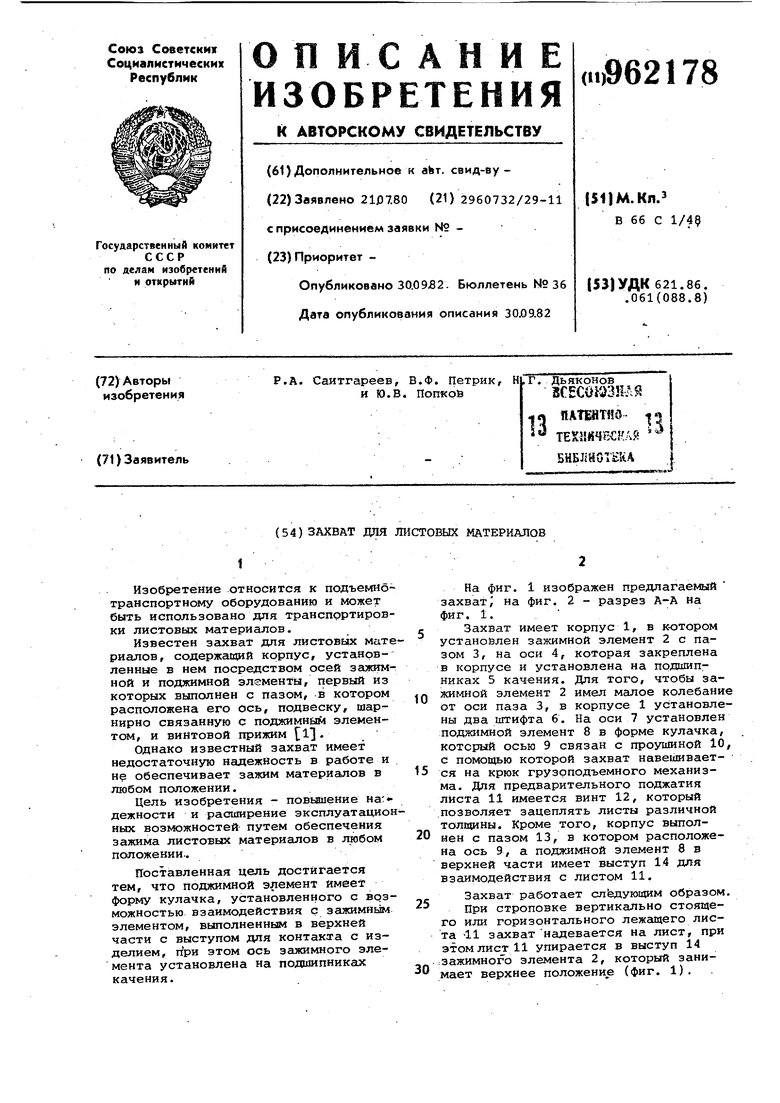
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ РАДИОЭЛЕМЕНТОВ, ПРЕИМУЩЕСТВЕННО МИКРОСХЕМ, НА ПЕЧАТНУЮ ПЛАТУ | 1991 |
|
RU2026613C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА КРИВОЛИНЕЙНОГО ОБРАЗЦА ПРИ РАСТЯЖЕНИИ | 1995 |
|
RU2095781C1 |
| КЛЕЩЕВОЙ ЗАХВАТ | 1996 |
|
RU2106220C1 |
| ДИСПЕНСЕР ДЛЯ ЛИСТОВОГО МАТЕРИАЛА | 2008 |
|
RU2484753C2 |
| Грузозахватное устройство | 1987 |
|
SU1532508A1 |
| УСТРОЙСТВО ДЛЯ ПОДВЕШИВАНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ТОКОВЕДУЩЕГО ПРОВОДА ТРОЛЛЕЙБУСНОЙ ИЛИ ТРАМВАЙНОЙ КОНТАКТНОЙ СЕТИ (ВАРИАНТЫ) | 1995 |
|
RU2099211C1 |
| ГОЛОВКА РАПИРЫ ДЛЯ ТКАЦКОЙ МАШИНЫ | 2010 |
|
RU2501893C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2559922C1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |
Изобретение относится к подъемибтранспортному оборудованию и может быть использовано для транспортировки листовых материалов.
Известен Эс1хват для листовых материалов, содержащий корпус, установленные в нем посредством осей зажимной и поджимной элементы, первый из которых выполнен с пазом, -в котором расположена его ось, подвеску, шарнирно связанную с поджимный элементом, и винтовой прижим t--l
Однако известный захват имеет недостаточную надежность в работе и не обеспечивает зажим материалов в любом положении.
Цель изобретения - повышение на; дежности и расширение эксплуатационных возможностей путем обеспечения зажима листовых материалов в любом положении..
Поставленная цель достигается тем, что поджимной элемент имеет форму кулачка, установленного с возможностью взаимодействия с зажимным элементом, выполненным в верхней части с выступом для контакта с изделием, этом ось зажимного элемента установлена на подшипниках качения.
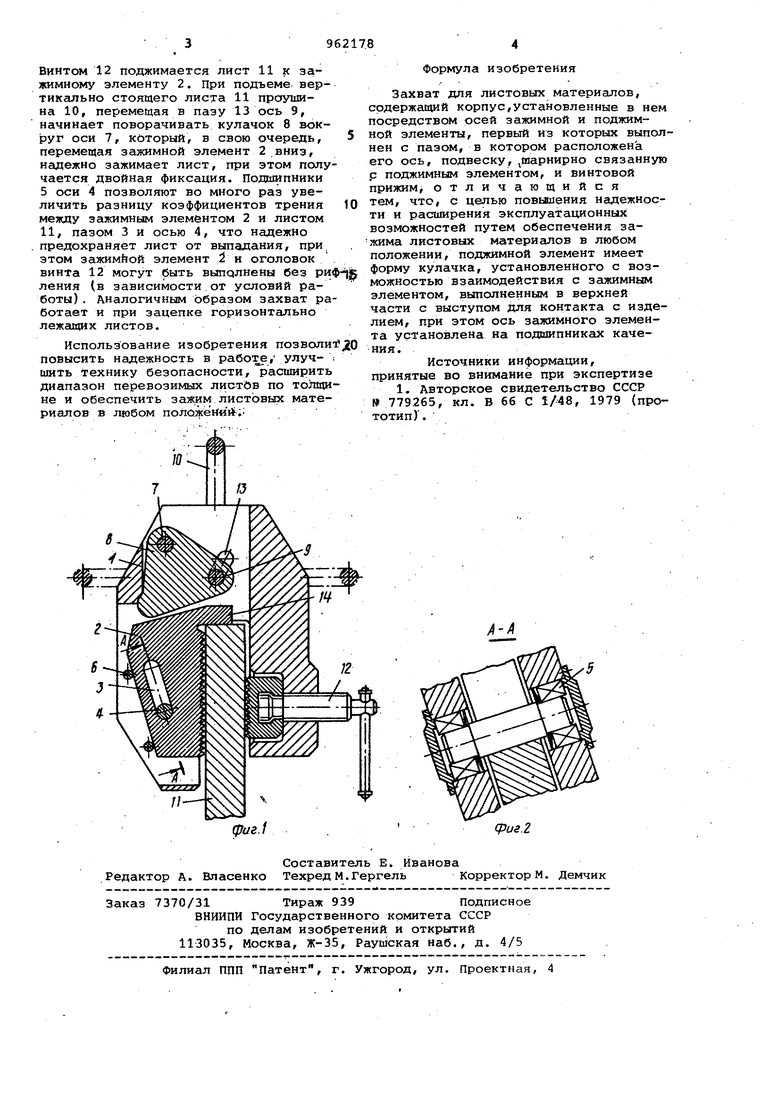
На фиг. 1 изображен предлагаемый захват; на фиг. 2 - разрез А-А на фиг. 1.
Захват имеет корпус 1, в котором устанойлен зажимной элемент 2 с пазом 3, на оси 4, которая закреплена в корпусе и установлена на подшипниках 5 качения. Для того, чтобы зажимной элемент 2 имел малое колебание
10 от оси паза 3, в корпусе 1 установлены два штифта 6. На оси 7 установлен поджимной элемент 8 в форме кулачка, который осью 9 связан с проушиной 10, с помощью которой захват навеШивает15ся на крюк грузоподъемного механизма. Для предварительного поджатия листа 11 имеется винт 12, который .позволяет зацеплять листы различной толщины. Кроме того, корпус выпол20нен с пазом 13, в котором расположена ось 9, а поджимной элемент 8 в верхней части имеет выступ 14 для взаимодействия с листом 11.
Захват работает следующим образом.
25
При строповке вертикально стоящего или горизонтального лежащего листа -11 захват надевается на лист, при этом лист 11 упирается в выступ 14 :3ажимного элемента 2, который зани30мает верхнее положение (фиг. 1).
