Изобретение относится к автома- тическому управлению техническими объектами и может найти применение там, где требуется автоматический вывод цифровых автоматических систем (ЦАС) из нежелательного режима периодических колебаний.
Программа работы некоторых современных объектов с ЦВМ в контуре управления предусматривает программное изменение периода дискретности I (TO) ЦИ1, что может привести к возникновению периодических колебаний с другими, заранее неизвестными частотами,
Известно устройство для вывода системы автоматического управления из режима автоколебаний, содер-. жащее блок программ, выходы которого через вентили и исполнительные органы связаны с объектом управления и регулятором 1.
Основными недостатками данного устройства являются не выемок ие помехоустойчивость и быстродействие.
Наиболее близким к предлагаемому является устройство для вывода системы управления из режима автоко;лебаний, содержащее программный блок и сигнализатор наличия aвfoкoлeбaНИИ, первый вход которого соединен с первым выходом объекта управления, второй выход которого подключен к первому входу регулятора, выходом соединенного с первым входом объекта управления 2.
Основным недостаткам известного устройства является невысокое быстродействие, так как требуется пос10ледовательный перебор программ коррекции с момента возникновения колебаний до их прекращения.
Цель изобретения - повышение быстродействия устройства.
15
Указанная цель достигается тем, что в устройство введены фазоизмеритель, генератор синусоидальных колебаний, последовательно соединенные блок совпадений и первый вы20числительный блок, а также последовательно соединенные второй вычислительный блок, блок сравнения, дешифратор и блок корректирующих устройств, выход которого подключен
25 к второму входу регулятора, выходом соединенного с первым входом фазоизмерителя, второй вход котороf-o подклкгчен к выходу сигнализатора наличия автоколебаний и к первому
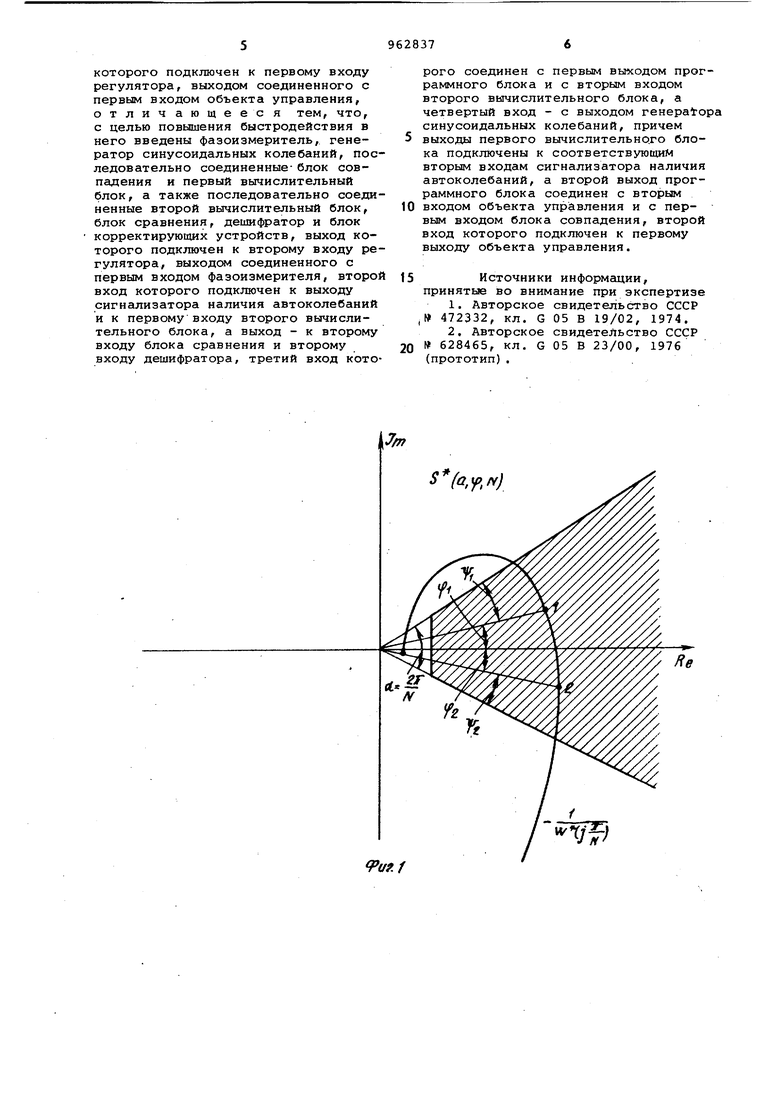
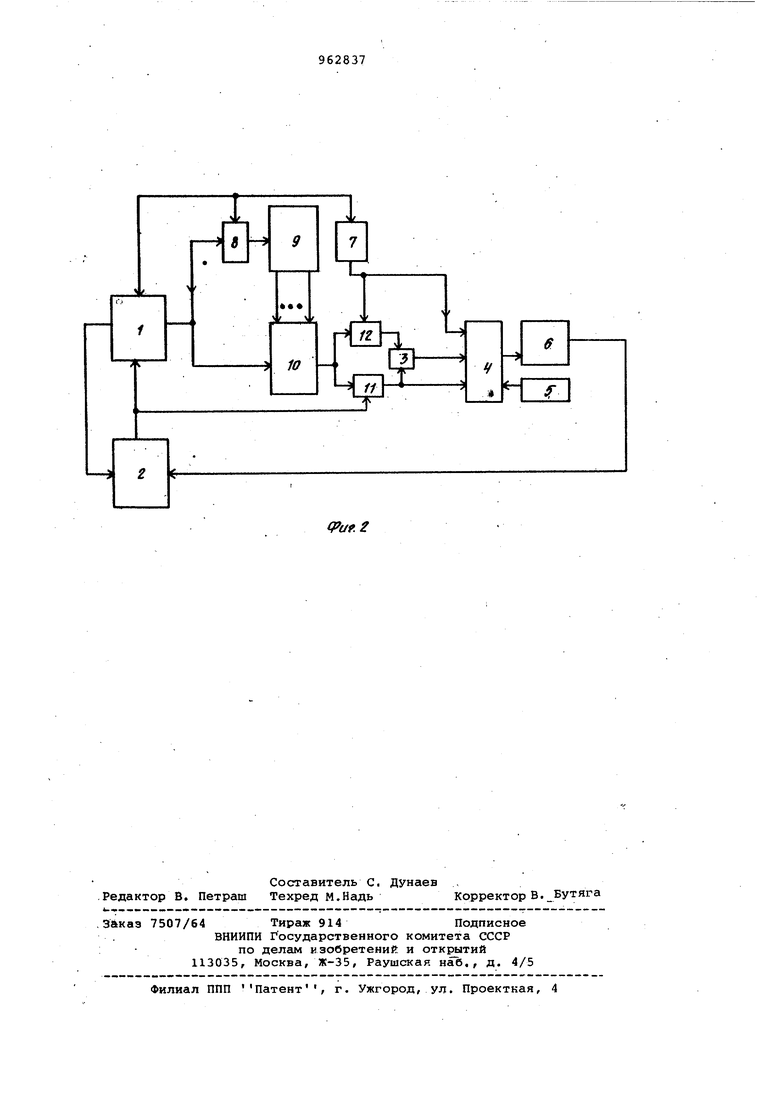
30 входу второго вычислительного блока. а выход к второму .входу блока сравнения и второму входу дешифратдра, третий вход которого соединен с первым выходом программного блока и с вторым входом второго вы числительного блока, а четвертый вход - с выходом генератора синусо дальных колебаний, причем вылоды первого вычислительного блока подключены к соответствующим вторым входам сигнализатора наличия автоколебаний, а второй выход програмМНОГ9 блока соединен с вторым вход объекта управления и с первым входом блока совпадения, второй вход которого подключен к первому выход объекта управления. На фиг.1 приведена примерная амплитудно-фазовая характеристика цифровой автоматической системы; н фиг.2 - блок-схема устройства. Частоты uOf, периодических колеба ний, возникающих в цифровых автома тических системах, находятся в цел численном отношении с ч-астотой ш выдачи данных ЦВМ. Это позволяет заранее определить все возможные частоты-периодических колебаний пр любых значениях N (где N - относительный опериод колебаний). Знание этих частот и -наличие ЦВМ в контур управления дает возможность исполь зовать дискретные корректирующие фильтры, реализуемые в самой ЦВМ. Периодические процессы в ЦАС во можны, если амплитудно-фазовая характеристика (АФХ)системы на фи сированных частотах (где относительная частота ко лебаний) будет заходить в область возможных значений коэффициента гармонической линеаризации S(o(.,4, Например, для нелинейности релейного типа эта область определяется усеченным сектором с углом раствор - г; (фиг.1). Значения аргумента N передаточной функции системы можно определить путем нахождения угла сдвига фаз ± выходным и входным сигналами объекта управлен Нахождение частоты ио возникших колебаний и угла сдвига фаз + Ч позволяет определить требуемое зна чение угла «:: d ± Ч , на который необходимо провести коррекцию систем (фий. 1) . При изменении периода дискретности необходима перенастройка фильтров сигнализатора наличия авт колебаний. Изменение ТдСшо) при N 2,3,4... ведет к пропорционал ному изменению возможных частот U колебаний (так как ) После перенастройки сигнализаторов на но вые частоты u)Li устройство работает при новом TO Блок-схема устройства содержит: объект 1 управления, регулятор 2, блок 3 сравнения, дешифратор 4, генератор 5 синусоидальных колебаний блок6 корректирующих устройств, программный блок 7, блок 8 совпадения, первый вычислительный блок 9, сигнализатор 10 наличия автоколебаний, фазоизмеритель 11 и второй вычислительный блок 12. Устройство работает следующим образом. При возникновении колебаний определенной частоты в системе (при Тд const) возбуждается выход одного из фильйров в сигнализаторе 10 наличия автоколебаний, настроенный на эту частоту. Фазоизмеритель 11 определяет угол сдвига фаз Ч , а вычислительный блок 12 по известному TQ находит значение угла oL , в блоке 13 сравнения определяется значение угла Ч, т.е. угол коррекции (фиг.1). Сигнал, пропорциональный углу V , поступает на вход дешифратора 4. Одновременно на второй вход дешифратора 4 поступает сигнал с фазоизмерителя 11, пропорциональный знаку угла сдвига фаз, а на третий - сигнал, пропорциональный заданному запасу устойчивости по фазе , поступивший с выхода программного блока 7. На основе полученной информации дешифратор 4 подключает выход генератора 5 к входу блока б корректирующих устройств, после чего начинается отработка программ фазовой коррекции. При изменении периода дискретности TQ по сигналу с блока 8 совпадения вычислительный блок 9 на основании известных величин ио и N производит пересчет возможных значений ujfq . Сигнализатор 10 настраивается на новые частоты и)),, возможных колебаний. Предлагаемое устройство позволяет выводить цифровую автоматическую систему с переменным периодом дискретности из режима периодических колебаний при Тр const и TO var, « также облгщает более высоким быстродействием, которое достигается анализом частотных характеристик системы и выбором соответствующего корректирующего устройства. Формула изобретения Устройство для вывода цифровой автоматической системы из режима периодических колебаний, содержащее программный блок и сигнализатор наличия автоколебаний, первый вход которого соединен с первым выходом объекта управления, второй выход
которого подключен к первому входу регулятора, выходом соединенного с первым входом объекта управления, отличающееся тем, что, с целью повышения быстродействия в него введены фазойзмеритель, генератор синусоидальных колебаний, последовательно соединенные- блок совпадения и первый вычислительный блок, а также последовательно соединенные второй вычислительный блок, блок сравнения, дешифратор и блок корректирующих устройств, выход которого подключен к второму входу регулятора, выходсми соединенного с первым входом фазоиэмерителя, второй вход которого подключен к выходу сигнализатора наличия автоколебаний и к первому входу второго вычислительного блока, а выход - к второму входу блока сравнения и второму входу дешифратора, третий вход которого соединен с первым выходом программного блока и с вторым входом второго вычислительного блока, а четвертый вход - с выходом генератора синусоидальных колебаний, причем
выходы первого вычислительного блока подключены к соответствующим вторым входам сигнализатора наличия автоколебаний, а второй выход программного блока соединен с вторым
входом объекта управления и с первым входом блока совпадения, второй вход которого подключен к первому выходу объекта управления.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР 472332, кл. G 05 В 19/02, 1974.
2.Авторское свидетельство СССР № 628465, кл. G 05 В 23/00, 1976
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поддержания устойчивых периодических процессов | 1981 |
|
SU962860A1 |
| Устройство для адаптивного программного управления положением объекта | 1977 |
|
SU622054A1 |
| ПЕЛЕНГАТОР | 1991 |
|
RU2073880C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| Преобразователь двоичного кода во временной интервал | 1978 |
|
SU746918A1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1052554A1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| Устройство для отладки программ цифровых процессоров обработки аналоговых сигналов | 1988 |
|
SU1640696A1 |
| Устройство для контроля дискретных объектов | 1978 |
|
SU711543A1 |
| Устройство для многоканального ввода цифровой информации | 1981 |
|
SU978135A1 |
Uf.f
