ИэоОретение относится к технике аакалки крупногабаритных длинномерных изделий, например труб, валов, переменных сечений в водяном баке, и может, быть использовано в металлургической промышленности. Известно закалочное устройство, Позволяющее производить программную закалку длинномерных изделий с переменным поперечным сечением, изменяющимся ступенчатоС J. Однако это устройство обладает значительной инерционностью,не обла дает технологической гибкостью (труд ность закалки изделий с различшлми длинами ступеней),что не дает возмо ность достаточно точно выдержать те ператур|1Ый режим закалки,то есть тр , буёмое качество закаливаемых издели Наиболее близким .к предлагаемому по технической сущности и достигаеMOMt результату является устройство для программной закалки длинномерных изделий с переменной конусность содержащее подъемный механизм, первый выход которого соединен с блока датчиков дискретного изме нения конусности, первый выход кото рого через пp6гpa Ф4ный блок скорос.ти соединенс одним из входов регулятора скорости, а выход регулятора скорости соединен с входом подъемно го механизма, импульсный датчик перемещения, соединенный с вторым выходом подъемного механизма, программ.ный блок частоты, преобразователь код-аналог, реверсивный счетчи один из входов которого соединен с импульсным датчиком перемещения, второй вход счетчика через программный блок частоты соединен с вторым выходом блока датчиков дискретного изменения конусности изделия, а .выход счетчика через преобразовател код-аналог соединен с сдним их входо регулятора скорости 2 3. Известное устройство обеспечивае постоянство скорости извлечения заготовок, т.е. обеспечивает более iВысокое качество закалки. Однако он не позволяет получить требуемое ко1Личество закалки конических изделий имеющих участки значительной конусности. При закалке таких изделий с помощью известного устройства возникает недопустимый градиент перепада температур, по сечению заготовКИ., приводящий к появлению-ВЫСОКИХ внутренних напряжений,являющихся причиной образования трещин и коробления закаливаемых заготовок. Поэтому в целях обеспечения равномерного охлаждения, а следовательно получения высокого уровня комплекса .механических свойств и их стабильчНОсти по длине заготовки необходимо проведение периодического йз влйчения заготовок из водцл на воздух в процессе закалки, т.е. охлаждение участков заготовок большей конусности должно производиться методом купаний. Температурный режим закалки задается более сложной технологической циклограммой, выполнение которой с помощью известного устройства не представляется возможным. Цель изобретения - повышение качества закалки длинномерных изделий. Поставленная цель достигается тем, что в устройство для -программной закалки длинномерных изделий, содержащее подъемный механизм, первый выход которого соединен с входом блока датчиков дискретного изменения конусности, первый выход которого через прогр.аммный блок скррости соединен с одним из входов регулятора скорости,а выход регуля-Рора скорости соединен с вхбдом подъемного механизма, импульсный датчик перемещения, боединенный с вторым выходом подъемного механизма, программный блок частоты, преобразователь код-аналог, реверсивный счетчик, один из входов которого .соединен, с импульсным датчиком перемещения, второй- вход счет.чика через программный блок частоты соединен с вторым выходом блока датчи- . ков дискретного изменения конусности изделия, а выход счетчик-а через преобразователь код-аналог соединен с одним из входов регулятора скорости, введены программный блок цикличности и блок реверса, первый вход которого подсоединен с одному из выходов программного блока скорости, второй вход к одному из выходов блока датчиков дискретного изменения конусности, а выход блока реверса соедин.ен .с вторым входом подъемного механизма, причем вход программного блока цикличности соединен с одним из выходов блока датчиков, дискретного изменения конусности, а выход подключен к одному их входов . блока датчиков дискретного изменения конусности. Введение блока реве|зса обеспечи,йает возможность работы подъемного устройства в режиме подъема и опускания, т.е. в режиме, необходимом для реализации закалки методом купаний. Использование блока цикличности позволяет получить требуемое количество циклов купаний , На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2 - технологическая циклограмма одного из возможных режимов эаксШки; на фиг. 3 - схема блока датчиков дискретного изменения конусности и схема блока аикличности; на фиг, 4 -схема программного блока скорости; на фиг. 5 -, схема регулятора скорости; на |фиг. б - схема программного бло;ка частоты; на фиг. 7 - схема блока реверса.i
Устройство для программной закалки длинномерных изделий имеет подъемный механизм 1, блок 2 датчиков дискретного изменения конусности, программный блок 3 скороети, задающий определенную скорость, регулятор 4 скорости, импульсный датчик 5 перемещения, двухвходовый . реверсивнй счетчик б, программный блок 7 частоты, преобразователь 8 код-аналога, блок .9 реверса и блок -10 цикличности.
Подъемный механизм 1 содержит ле-. бедку, привод которой осуществляется через силовой редуктор электродвигателем с фазным ротором.
Блок 2 датчиков дискретного изменения конусности изделия (фиг.З) включает в себя редуктор. 11, диамагнитный прерыватель 12, бескон-(тактные датчик 13.1...13,п,уста- : новлённыё на диске 14. Диамагнитный прерыватель связан через редуктор 11 с подъемным механизмом 1. Бесконтактные датчики 13 дискретного изменения конусности расположены по окружности диска 14. согласно программе, амплитуд купаний. Датчики 13 представляют собой электронные генераторы гармонических .колебаний с самовозбуждением, срыв генераций которых происходит при наличии в их прорези диамагнитного прерывателя 12.
. Блок 2 работает следующим образом В исходном состоянии (перед началом погружения заготовки в воду) на диамагнитный прерыватель реагирует,т.е. готов к работе, только датчик 13 конца опускания (фиг.З), а все остальные заблокированы (исключены в работе . После завернаения полного погружения разблокируются все нечетные датчики (13.3.13.5..,). В процессе выполнения программы закалки каждый предыдущий четный датчик 13 .разблокируется пocлeдs щим четным датчиком после первого его срабаты. вания, Последовательное блокирова-г ниё нечетных датчиков 13 осуществляется блоком. 10 цикличности через рёле А,Б,В,Г,Р5 Р переходе к режиму купаний с другой
(амплитудой.
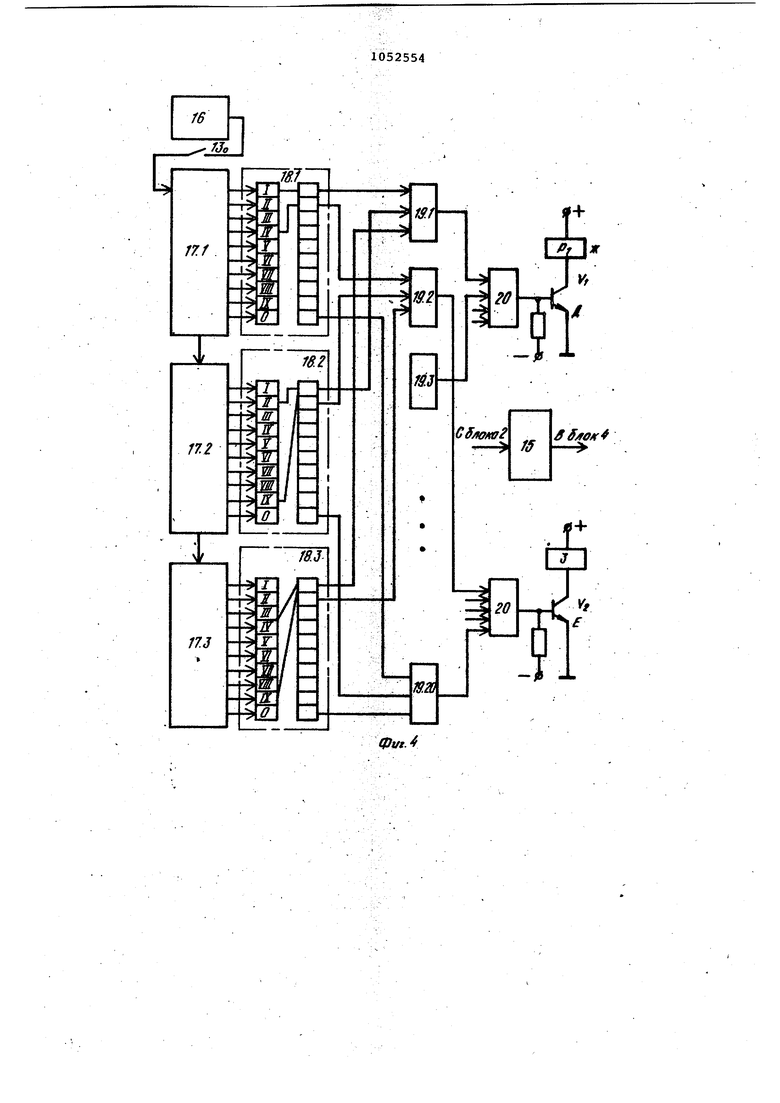
Программный блок 3 скорости,внут ренняя структура которого приведена на фиг. 4, по сигналам с блока 2 дат чиков дискретного изменения конусности выдает в блок 4 несколько постоян4Йых опорных напряжений, величина котрых зависит от конфигурации опорных напряжений, величина последних зависит от конфигурации изделия и рассчитывается для каждого изделия, кроме того реализует требуемую программу временных выдержек каждого участка изделия в охлаждающей жидкости, вй.здействуя на блок 9, Для этих целей блок 3 соответственно содержит источник 15 постоянных опорных напряжений, настройкой которого осуществлется задание требуемых скоростей перемещения изделия (подключение требуемых опорных напряжений к блоку 4 осуществляется соответствующими датчиками 13 блока 2) и программный счетчик времени. Программный счетчик времени может быть, например, выпол;нен по схеме перестраивающихся электронных часов, Для этого в своем составе он должен иметь задающий генератор 16 частотой один герц, несколько десятизарядных счетчиков -17. 1; 17. 2; 17,3, соединенных последовательно (например сверху вниз) счетчики 17.1 секунд, 17.2 десятков секунд и 17.3 сотен секунд, перестраивающийся дешифратор на десятиконтактных разъемах 18.1;18.2;18.3 .и элементах 19.1; 19,2.,.19.20, элементах 20 ИЛИ и узел сопряжения, например транзисторные ключи Д,E,V,V2 и реле Ж,3: Р и Ру, Программа времени задается распайкой разъемов 18,1;18.2; 18.3. Реле Ж-Р управляется нечетными элементами 19,настроенными с помощью разъемов 18 на время t,tj,t, (фиг. 2)/ а реле 3-Р2- четными схемами совпадения 19,2;19.4;19.б, настроенными с помощью тех же разъемов 18.1; 18,2; 18.3, на время t2,t,tg и т.д. (фиг. 2). В регуляторе 4 скорости, состоящем из узла 21 формирования напряжения, сравнивакядего устройства 22, заторможенного блокинг-генератора 23 (внутренняя структура регулятора 4 скорости приведена на фиг. 5), .суммируются сигналы с блоков 3 и 8 и производится изменение угла зажигания тиристоров 24 в статорной цепи двигателя 25 подъемного механизма 1. Регулятор 4 содержит три пары встречно-параллельно включенных тиристоров 24 и схему управления (фиг.. 5) . Схема управления, например, может быть выполнена по способу вертикального управления тиристорами. В этом случае она содержит узел 21 формирования пилообразного напряжения (фиг. 5), который формирует пилу из фазного напряжения, сравнивающее устройство 22 и
заторможенный блокинг-генератор 23. Причем для управления каждой пары тиристоров используется свое фазное напряжение. Таким образом, схема управления содержит три отдельных
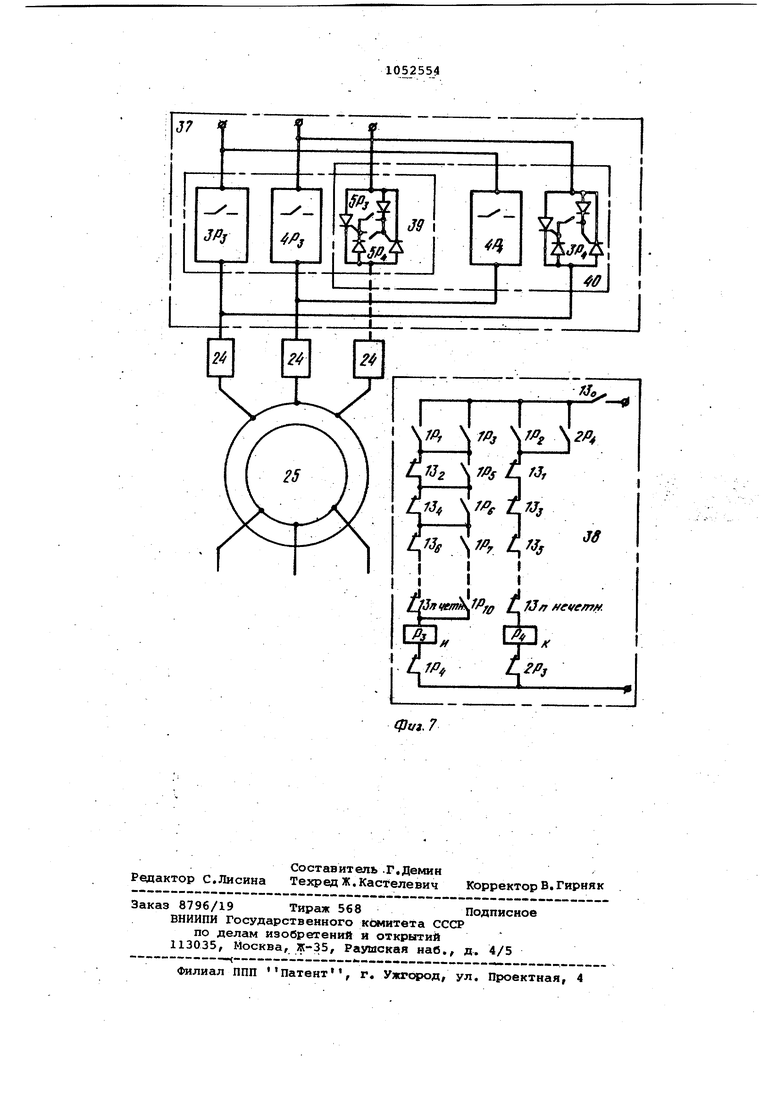
.канала. Принципиальная схема., одного канала приведена на фиг. 5, Импульсный датчик 5 перемещения (фиг. 1), к примеру индуктивный,ус танавливается вблизи выходной шестерни силового редуктора подъемного механизма 1и формирует прямоугольные импульсы при наличии возл него каждого зуба шестерни. Линейная скорость перемещения заготовки преобразуется в дискретную форму. По известному коэффициенту редукции силового редуктора подъемно го механизма определяется цена каждого импульса, выдаваемого дат чиком 5. Подсчет импульсов, формируемых датчиком 5, позволяет определять текущую скорость перемещения изделия. Импульсный датчик 5 перемещения подключен к вычитающему входу реверсивного счетчика fe Реверсивный счетчик б является эле ментом сравнения текущей скорости перемещения изделия, измеряемой датчиком 5, и заданной. Он может выть реализован на интегральных микросхемах типа ИЕ-6. Программный блок 7 частоты (фиг служит для задания требуемой скоро ти перемещения изделия в процессе закалки. В своем составе он имеет задающий генератор 26, систему сче чиков 27, дешифратор 28, коммутатор 297 счетчик 30 участков, дешифратор 31 участков, схемы 32 сов падения (схемы И), схемы 33 ИЛИ и триггер 34 установки О. В коммутаторе 29 и схемак 32 со падения набираются коэффициенты, на которые должна делиться частота задающего генератора 26. При включении питания с вьодержк времени срабатывает схема триггера 34 установки О, представляющая триггер йЫидта с большой емкостью на входе. При заряде емкости до оп деленной величины триггер Шмидта сграбатывает. Импульс со схемы 34 устанавливает счетчик 30 участков в О. В процессе выполнения заданной циклопрограммы закалки (фиг после первого срабатывания каждого датчика 13 с блока 2 в счетЧик 30 участков блока 7 поступают импульсы, С приходом первого импульса в : счетчик 30 участков появляется еди ничный уровень на первом выходе де шифратора 31, разрешающий работу .первой схеме 32.1 совпадения (на фиг. 6 - слева). Все остальные схемы 32 заперты, так как единичный сигнал только на первом выходе дешифратора 31. Если, например, на первой схеме 32 набрано с помощью коммутатора 29 число 100, на выходе схемы 3 ИЛИ появляе тся сотый импульс, по- стуоающий с генератора 26, т.е. частота генератора 26 делится на 1 Этот импульс со схемы 33 сбрасывае счетчики 27 в ,т.е. счет начинается с нуля после набора 100 импульсов . При поступлении второго импульса в счетчик 30 участков появляется единичный уровень на втором выходе дешифратора 31 и откр ывается вторая схема 32 совпадения. Частота генератора 26 делится на число, записанное во второй схеме 32 и т.д. Блок 8 преобразователя код-ангшог может быть выполнен, например, на интегральных микросхемах 35 типа К 472ПА1Б и 36 типа 140УД6. На вход MHKpocxeNH 35 поступает десятиразрядный код числа, снимаемого, с выходов реверсивного счетчика 6.На выходе микросхемы 36.получается постоянное напряжение, величина и знак которого определяются величиной и знаком отклонения текущей скорости перемещения изделия от скорости задаваемой блоком 7. Блок 9 реверса служит для обеспег чения пуска, -останова и реверсирова1ния двигателя-подъемного механизма . Для. выполнения указанных функций блок 9 (фиг. 7) содержит коммутатор 37, который может быть реализован на тиристорах, схему 38 управления, (в релейном исполнении). Блок 9 реверса работает следующим .образом. Тиристррная группа 39 коммутатора, обеспечивающая управлен.ие подъемом, включается в работу при срабатывании реле ИсРз подъема, а тиристорная группа 40, обеспечивающая режим ч опускание, - при срабатывании реле Кг-Р опускания. Реле ИгР и реле вк/цочаются после срабатывания в блоке 3 соответственно реле ТИг-Р и З-Ру (фиг. 4). Отключается реле И-РЭ 1 останов при подъеме) при срабатывании нечетных датчиков 13.3; 13.5,...блока 2. Реле К-Р-отключается (останов при опускании) при срабатывании четных датчиков 13.2;13.4;13.6,;..блока 2. Блокирование четных датчиков при переходе к купаниямв другой точке осуществляется блоком 10 цикличности через контакты 1Р5,1Р. ,1Р., ..,lP:jj.pene А,Б,В,Г циклов Р j ,Р, Р-) ,Рд ,... . . После завершения погружения изделий в воду диамагнитный прерыватель 12; (фиг. 3) достигает датчика 13.1 конца опускания, вызывая его срабатывание. После срабатывания датчика 13 через его нормаль-:но открытые, контакты разблокируются все нечетные датчики 13.3;13.5.,. В блоке 9 (фиг. 7) подается питание; на схему 38 управления, а в блоке 3 (фиг. 4) задающий генератор 16 подключается к счетчику 17.1 и начинается отсчёт времени t ,(фиг. 2). По истечении времени в блоке 3 срабатывает реяе Р (фиг. 4), через контакты IP., которого в блоке 9 (Фиг.7) эал4ыкается цепь питания реле Р подъема В результате этого через контакты 3Pj,4P3 и 5Рз включается тиристорная группа 39 подъема в коммутаторе 37. Начинается процесс извлечения изделия из воды. Диамагнитный прерыватель 12 (фиг. 3), жестко связанный через редуктор 11 с подъемным механизмом, 1, перемещается от датчика 13,1 к последующим датчикам. 13.2;13.3; 13.4 и т.д. Пройдя датчик 13 и не вызывая его срабатывания (датчики 13.3;13.5,.. и т.д. .заблокированнл) , диамагнитный прерыватель 12 достигает прорези датчика 13.3. При достижении прерывателя 12 датчика 13.3, задающего первую точку купания, последний срабатывает, а егЪ нормально заи ьснутые контакты размыкают цепь питания реле Р подъема. РелеР обесточивается, вызывая выключение тиристорной группы39 подъема и останова двигателя. Изделие выдерживается на уровне Н (фиг.2), определяемом положением датчика 13.3 в течение времени tj.np истечении времени t 2 (фиг. 2) в блоке 3 счетчик времени через схему совпадения 19.2 (фиг. 4) включает реле Р2,через нормально открытые контакты которого в блоке 9 (фиг. 7) включается реле Р опускания. Через контакты ЗР ,. 4Р и 5Р включается цепь управления тиристорной группы 40, в результате чего на Шнается , процесс опускания изделия на уровень Нд (фиг.2), определяемый положением датчика . 13.2. В процессе опускания изделия прерыватель 12,достигнув датчика 13.2, вызывает его срабатывание.Его нормально замкнутые контакты размыкают цепь питания реле Р. опускания (фиг. 7), в результате тиристорная группа 40 опускания выключается, процесс погружения прекращается, а изделие выдерживается в воде в течегг ние следующего отрезка времени t (фиг. 2). По окончании времени tj счетчик времени блока 3 (фиг. 4) через схему 19.3 совпадения включает реле Р , нормально открытые контак- тц которого замыкают цепь питания реле Р подъема (фиг. 3), в результате чего начинается повторный подъем изделия на уровень, определяемый датчиком 13.3. При достижении датчика 13.3 прерыватель вызывает его ера батывание. Нормально замкнутые контакты датчика 13,3 рвут цепь питания реле РЗ подъема, и извлечение прекра щается. Далее процесс купания зацикливается, нечетный датчик производит останов при подъеме, четный - останов при опус-: канин, т. е. подъем сменяется опусканием и наоборот..
Переход к процессу купания изделия в,следующих точках осуществляется блоком10 цикличности.
Блок 10 цикличности, внутренняя структура которого приведена на фиг. 3, предназначен для выполнени заданной программы циклов купа|Ний закаливаемых изделий.Блок 10 содержит несколько десятиразрядных счетчиков 41.1 и41.2 (в данном слчае два), программный дешифратор на десятиконтактных разъемах- 42.1 и 42,2 и схемы 43.1...43.1О совпа дения, каждая из которых через реле Pj . блокирует соответственно нечетные датчики 13.3;13.5.... Задание программы циклов осуществляется распайкой разъемов 42.1 и 42.2. Заданная программа циклов реализуется следующим образом. Каждое опускание заготовки фиксируетс нечетными датчиками блока 2. Для 1-й точки - датчиком 13.2, для 2-й - датчиком.13.4, для 3-й датчиком 13.6 и т.д..Выходы всех нечетных датчиков подключены к входу счетчика 41.1 блока 10 цикличности (фил. 3) . Благодаря этому в счетчиках и 41.2 фиксируетс ойцее число циклов купаний. Таким образом, для рассматриваемого случая по завершению третьего опускания в счетчике 41.1.циклов записывается три единицы, а на выходе схемы 43.1 совпадения появляется сигнал, приводящий к срабатыванию реле Р 5 которое своими нормально открытыми контактами Iff блокирует контакты датчика 13.3 (фиг. 3 и 7), включенные в цепь питания реле Р подъема. Поэтому при последующем - четвертом, согласно, фиг. 2 подъёме изделия,оно извлекается на уровень Н , опре|деляемый датчиком 13.5 (срабатыва|Ние датчика 13,3 - размыкание его {нормально замкнутых контактов не вызывает разрыва цепи питания реле PJ подъема). Дальнейшее купание изделия возле второй точки происходит в аналогичной последовательности с той лишь разницей, что останов при подъеме осуществляется при срабатывании датчика 13,5, а при опускании - по датчику 13,4, Каждое срабатывание датчика 13,4 фиксируется в счетчиках 41,1 и 41,2 (4«г,3), При вапи|си в счетчиках пяти импульсов, что соответствует выполнению двух купаний на уровне Н (Фиг, 2), срабатывает схема 43,2, управляюиая реле Р,циклов (фиг.З), в ре- зультате чего нормально разомкнутые контйкты 1Р(, блокируют нормаль,но замкнутые контакты датчика 13.2 что соответствует разрешению к перходу для купаний на следующем третьем уровне Hj (фиг. 2,3 и 7).
Предлагаемое устройство функци онирует следующим образом.
Перед началом закалки в блок 10 цикличности вводится прогрсц ма циклов (распаиваются и устанавливаются paзъe Ф 42.1 и 42.3 в программный дешифратор), в блок 2 датчиков дискретного изменения конусности вводится программа амплитуд купаний (датчики 13 соответствующим образом, размещаются по окружности диска 14), в блок 3 скорости закладывается программа требуемых скоростей подъема (в источнике 15 постоянных напряжений выставляются соответствующие напряжения задания) и программа временных выдержек длительности циклов купаний (распаиваются и устанавливаются разъемы 18.1,18.2, 18.3 в счетчик времени) . Далее включается питание для всей систешл. Затем оператор, пользуясь ручным уп равлением подъемного механизма 1, производит погружение нагретой заготовки в закалочную среду. По завершении погружения в блоке 2 ера-, батывает датчик 13.1 конца опус , кания (фиг. 3), по сигналу которого на пульте оператора -загорается сигнальная лампочка останов, и он прекращает oriyекание.. Кроме того, при срабатывании датчика 13.1 конца опускания блок 9 реверса подготавливается к режиму подъема (фиг. 7),включается блок 19 цикличности (фиг.З), в программном блоке 3 скорости начинает работать счетчик времени.
По истечении времени (фиг. 2) программный счетчик времени блока 3 через блок 9 реверса, включает подъеный механизм 1, регулятор скорости 4 реализует требуемую скорость подъема Осуществляется извлечение закаливаемой заготовки на требуемую величину Н (фиг. 2) с заданной скоростью.. По мере извлечения диамагнитный прерыватель 12 блока 2 датчиков дискретного изменения конусности .(фиг. 3) перемещается от датчика 13, к последующим. При достижении им про рези второго датчика 13.3 с блока 2 в блок 9 реверса выдается сигнал, по которому двигатель подъемного механизма 1 обесточивается, а сам блок 9 реверса подготавливается к режиму опускания. Кроме тот го, по сигналу второго датчика 13,3 блока 2 блокируется первый датчик 13,2, программный блок 7 частоты переводится на очередной коэффициент деления, в блоке 3 к сравнивающе му элементу 22 подключается напряжение задания, определяющее требует мую скорость опускания. Далее счетчик времени программного блока 3 скорости осуществляет отсчет интервала времени t2 (фиг. 2), по окончаНИИ которого с блока 3 в блок 9 реверса выдается команда на включение подъемного механизма 1, По этому синалу-команде блок 9 реверса,ранее переведенный в режим опускание, включает подъемный механизм 1. Осуществляется процесс погружения в закалочную среду ранее извлеченной части заготовки (фиг.2) с задавае мой блоком 3 через регулятор 4 скоростью, величина которой измеряется, сравнивается с заданной и корректируется по цепи:импульсный датчик 5 перемещения,двухвходовый реверсивный датчик 6, преобразователь 8 код-аналог и регулятор 4 скорости По мере опускания диамагнитный npeSрыватель 12 блока 2, жестко связанн с подъемный механизмом 1, перемещаеся к разблокированному первому датчку 13.2. В момент достижения прерывателем первого датчика 13.2 с блок 2 в блок 9 реверса выдается сигнал на останов, по которому блок 9 отключает двигатель подъемного механизма 1 от сети, а сам переходит в режим подъема. Кроме этого,при срабатывании второго датчика с блока 2 в блок 3 поступает сигнал на переход к соответствующей скорости подъема, в блоке 7 изменяется коэф фициент деления частоты, а в счетчике циклов блока 10 цикличности записывается первая единица, соответствующая завершению первого цикла купаний. Далее через время, равное (фиг. 2), система начинает работать в режиме подъема,описанному выше. В д.1льнейшем процеси опускания,засы подъема
цикливаются. Процесс подъема сменяется опусканием и наоборот, т.е. происходит купание определенной части заготовки.
Счет циклов купаний осуществляется блоком 10 цикличности, так как на его вход поступает с блока 2 один импульс при каждом срабатывании нечетного датчика. После выполнения всех купаний возле первой точки, количество которых заложено программой в счетчике 10 цикличности, он блокирует второй датчик блока 2, т,е, формирует команду блоку 2 датчиков дискретного изменения конусности на переход к выполнению цикличных купаний возле второй точки (фиг, 2), в результате этого, извлечение закаливаемой заготовки осуществляется до второй точки,т,е, на большую величину Н,определяемую установкой четвертого датчика 13,5 блока 2, Для этой точки купаний третий датчик 13,4 блока 2 фиксирует точку останова при опускании
заготовки, а четвертый датчик 13,5 точку останова при подъеме.Далее система функционирует-аналогичным образом, т.е. при срабатывании нечетных датчиков блока 2 бло1к 9 реверса iостанавливает подъемный Jie-. ханиэм 1 и переходит в режим подъема, при срабатывании четных датчиков также останавливает подъемный I механизм, но сам переходит в режим опускания. При этом пуск электродвигателя подъемного механизма 1
всякий раз осуществляется программным счетчиком времени блока 3 через блок 9 реверса;
Применение изобретений позволяет уменьшить перепад температур в процессе закалки, свести к минимуму вероятность появления трещин и ко- робления и, как следствие, повысить качество закаливаемых длинномерных изделий, снизить процент брака и вторичной переработки (перез«калки).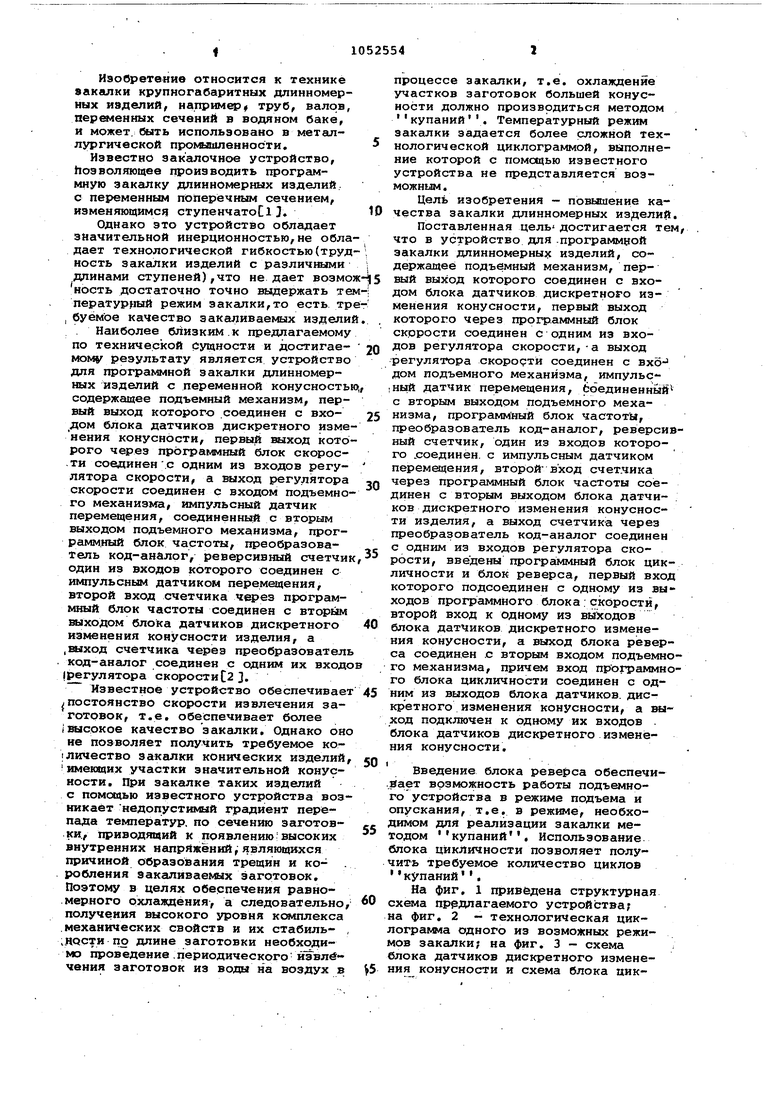



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программной закалки длинномерных изделий | 1988 |
|
SU1548224A1 |
| Устройство программной закалки длинномерных изделий | 1980 |
|
SU865942A1 |
| Устройство для программной закалки длинномерных изделий | 1980 |
|
SU908866A2 |
| Устройство для программной закалки длинномерных изделий | 1978 |
|
SU768836A2 |
| Устройтво для программной закалки длинномерных изделий с переменной конусностью | 1976 |
|
SU585226A1 |
| Устройство для программной закалки изделий | 1986 |
|
SU1315499A1 |
| Устройство для программной закалки длинномерных изделий | 1987 |
|
SU1440942A1 |
| Устройство для программной закалки длинномерных изделий в резервуаре с изменяющимся уровнем жидкости | 1978 |
|
SU706457A1 |
| Устройство для программной закалки длинномерных изделий с переменной конусностью | 1982 |
|
SU1036772A1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1016385A1 |

УСТРОЙСТВО ДЛЯ ПРОГРАММНО ЗАКАЛКИ ДЛИННОМЕРИУХ ИЗДЕЛИЙ, содержащееподъемный механизм, первый выход которого соединен с входом блока датчиков дискретного изм нения конусности, первый выход которого через программный блок скор ти. соединен с одним их входов регу лятора скорости, а выход регулятй,ра скорости соединен с входом подъ ного механизма, импульсный датчик перемещения, соединенный с вторым Ш:1ходом подъемного механизма, прог раммный блок частоты, преобразователь код-аналог, реверсивный счетчик, один из входов которого соединен с импульсным датчиком перемеще ния, второй вход счетчика через . программный блок частоты соединен с вторым выходе блока датчиков диск ретного изменения конусности изделия, а выход счетчика через преобразователь код-аналОг соединен с одним из входов регулятора сксчзости, отличающееся тем, что, с целью пошлшения качества аакалки, оно содержит програАФЛный блок цикличности и блок реверса, первый вход которого подсоединен к одному из выходов программного блока скорости, второй вход к одному из выходов блокадатчиков дискретного изменения конусности, а выход блока реверса соединен с.вторым входом . подъемного механизма, причем вход программного блока цикличности соединен с одним из выходов блока датчиков дискретного изменения конусности, а выход подсоединен к одному из входов блока датчиков дискретного изменения конусности.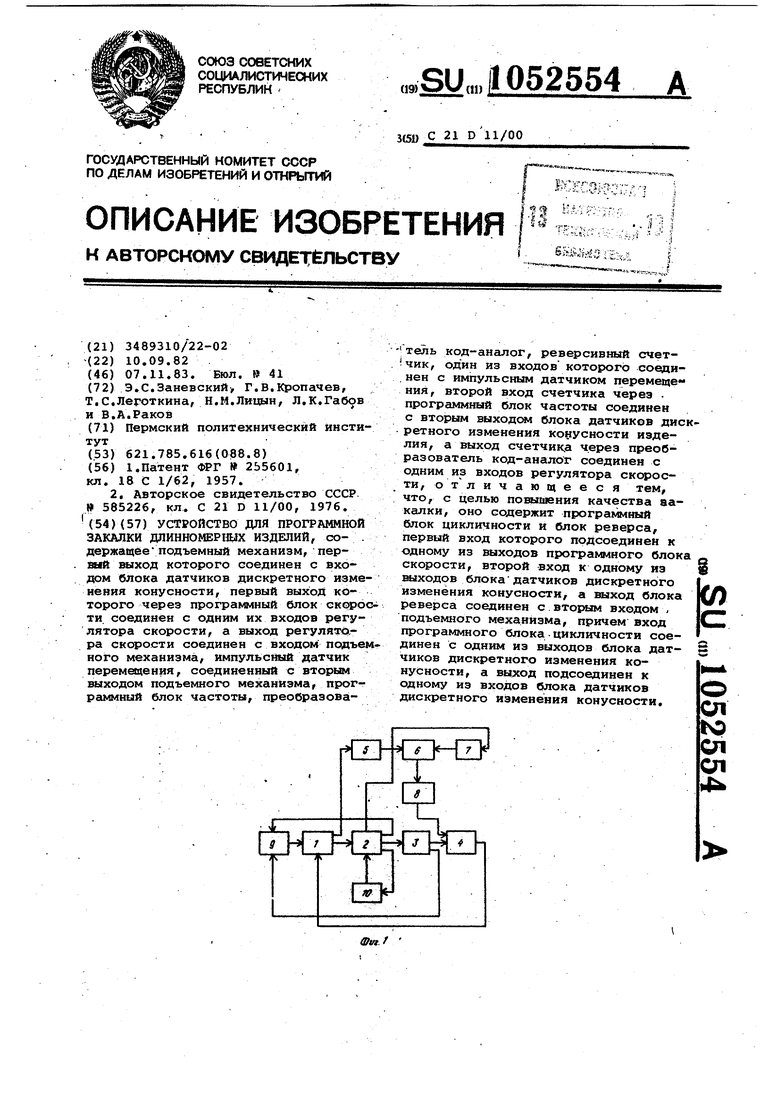
i J movHO
,, кулегний
Z /nOVKQ
„ куланг/и f /novffa „ffyfTOf/t/i/ fcrrl-r:t, t tj t,
Фиг. г
8 5/iOf(u ,W
Т т
Фуг. S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройтво для программной закалки длинномерных изделий с переменной конусностью | 1976 |
|
SU585226A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
