(54) ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| БОЛЬШЕГРУЗНЫЙ ТРАНСПОРТНЫЙ КОНТЕЙНЕР | 1994 |
|
RU2125532C1 |
| Контейнерная система сбора картофеля для безбункерного комбайна | 2016 |
|
RU2622692C1 |
| Контейнер-платформа для транспортирования большеформатных строительных панелей | 1981 |
|
SU1017606A1 |
| Установка для изготовления предварительно напряженных железобетонных изделий | 1976 |
|
SU971081A3 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| Крепеустановщик секций штрековой крепи | 1988 |
|
SU1640430A1 |
| БОЛЬШЕГРУЗНЫЙ КОНТЕЙНЕР | 1996 |
|
RU2089481C1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ ИНСТРУМЕНТА САМОХОДНОЙ РАБОЧЕЙ МАШИНЫ И ПРИСПОСОБЛЕНИЕ С ИНСТРУМЕНТОМ ДЛЯ САМОХОДНОЙ РАБОЧЕЙ МАШИНЫ | 2020 |
|
RU2787523C2 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ | 2009 |
|
RU2426298C1 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ БЫСТРОМОНТИРУЕМЫЙ | 2005 |
|
RU2295849C2 |

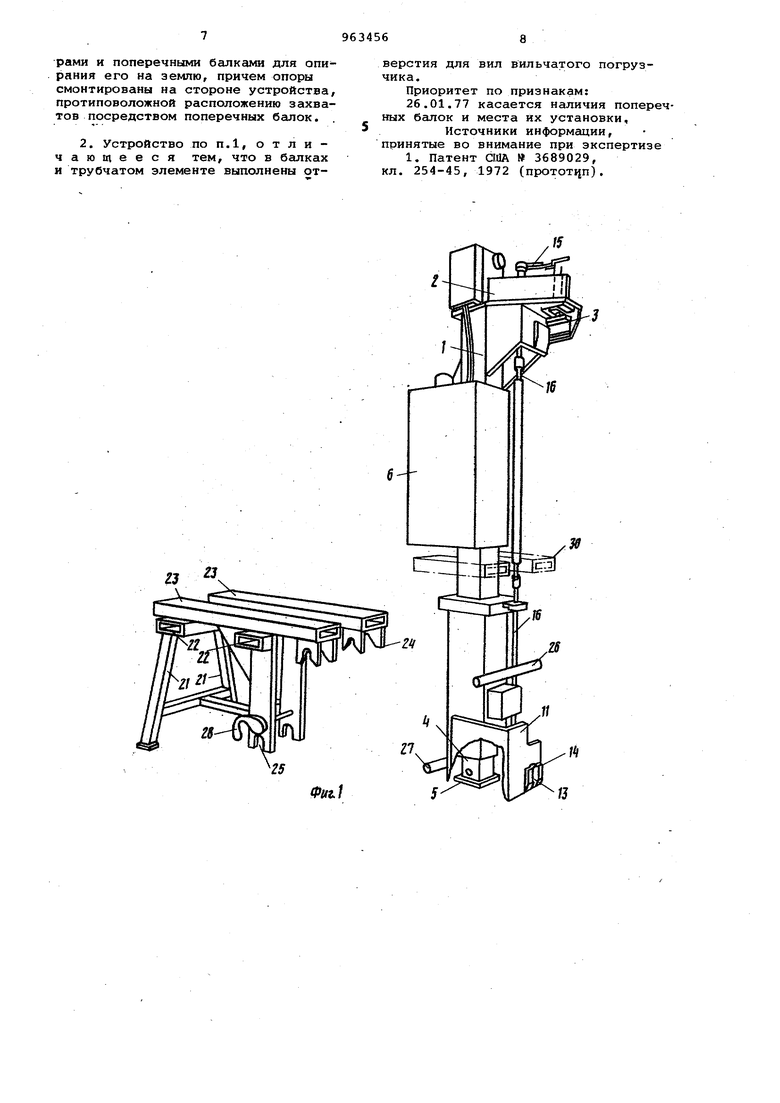
. Изобретение относится к гтбдъем,ным устройствс1м, а именно к устройствам, преимущественно, для подъема и опускания контейнеров. Известно грузоподъемное устройство, содержащее опирающуюся на землю стойку некруглого поперечного сечения, расположенную внутри подвижного трубчатого элемента такого же сечения, захваты для крепления контейнера К устройству, расположенные на одной из сторон последнего, и привод дЛя относительного телескопического перемещения стойки и трубчатого элемента l. Недостатком указанного устройства является неудобство в эксплуатации вследствие невозможности изменения расстояния между захватами в зависимости от типа контейнера. Цель изобретения - повышение удоб ства в эксплуатации. Для достижения указанной цели в привод включает/в себя гидроцилиндрj расположенный внутри трубчатого элемента, гидросистему для подачи масла в гидроцилйндр, смонтированную на трубчатбм, элементе, который снабжен кронштейном в верхней части и втулко подвижно установленной на нем с возможностью фиксации-относительно последнего по высоте посредством выдвижного стопора, при этом один иэ захватов закреплен- на упомянутом кронштейне, другой -; на втулке, а устройство снабжено опорами и поперечнымибалками для.опирания его на землю, причем опоры смонтированы на стороне устройства, противоположной расположению захватов. Кроме того, в балках и трубчатом элементе выполнены отверстия для вильчатого погрузчика. На фиг. 1 показано грузоподъемное устройство с отсоединенной опорой, общий вид на фиг. 2 - то же, вид сбоку в сборе с опорой; на фиг.З нижняя часть устройства с захватом и креплением опоры, к устройству; на фиг. 4 - фиксация втулки на трубчатом элементе; на фиг. 5 - второй вариант устройства, общий вид; на фиг. 6 - то же, гидравлическая система ; на фиг. 5; на фиг. 7 - то же, фиксация втулки на трубчатом элементе; нафиг,8 - то же, верхняя часть; на фиг.9 - то же, нижняя часть; на
фиг, 10 - третий вариант.устройства, общий вид.
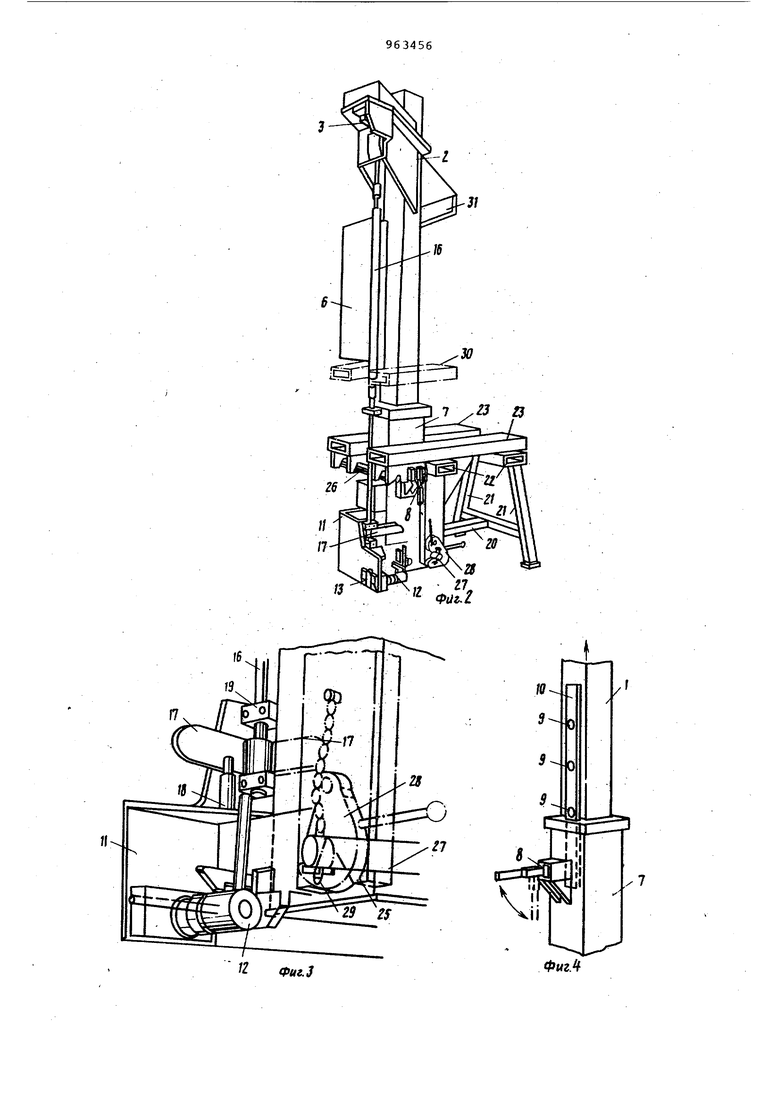
Устройство (фиг. 1-4) имеет прямоугольный, в частности квадратный, .в сечении трубчатый элемент 1, в верхней части которого расположен кронштейн 2 с верхним захватом 3. Внутри элемента 1 расположена вьщвижная стойка 4, имеющая также квадратное сечение, и гидроцилиндр (не показан),предназначенный для выдвижения и убирания стойки 4, имеющей снизу башмак 5. На трубчатом злемент.е смонтирован маслобак б с двигателем и насосом, образующие гидросистему и подающим масло под давлением в гидроцилиндр.
На том же элементе 1 расположеНа подвижная втулка 7, имеющая квадратное сечение, на которой установлен выдвижной стопор 8, который можно ввести в одно из отверстий 9, сделанных в направляющей планке 10 (фиг. 4), закрепленной на элементе 1, и установить тем самым втулку 7. в нужном положении по высоте трубчатого элемента 1. У нижнего конца втуки 7 расположен выступающий кронштей 11 с нижним захватом 12, головка 13 которого располагается, когда захват убран (фиг. 1), между выступающими накладками 14. .
Верхний захват 3 связан с рычагом 15, поворачиваемым вращающимся телескопическим валом 16 и рукояткой 17 (фиг. 3)f Для поворота захвата 3 необходимо рукоятку 17 с нижней частью вала 16 поднять, освободив от фиксатора 18, затем повернуть на 90 и опустить, установив ее в другое положение. Нижняя часть вала 16 вращаетс в подшипниках 19, между которыми расположена рукоятка 17, что ограничивает величину хода рукоятки при ее подъеме.
Для того, чтобы устройство могло находиться в свободно стоящем положении, оно снабжается на стороне, противоположной стороне расположения захватов, рамой 20 с неподвижными опорами 21 и полыми поперечными балками 22 и 23, расположенными попарно .под углом 90° друг к другу, в которы можно ввести вилы вильчатого погруз- 1ика. Раму 20 можно либо приварить к втулке 7, либо сделать ее съемной. Для этого на раме делаются кронштейн 24 и 25 с вырезами, которие надеваются на верхний и нижний стержни 26 и 27, приваренные в втулке 7, и используются запорные щеки 28,которыми рама крепится к нижнему стержню 27. Крепление осуществляется пальцем 29, котрый удерживает щеку 28 в запертом положении.
Рабочую высоту стоящего свободно на земле устройства можно регулировать, освободив стопор 8 и подняв трубчатый элемент 1 вверх вильчатым погрузчиком, введя его вилы в балки 30 или используя для этого проумину 31, приверенную к трубчатому элементу 1. Когда захваты 3 и 12 будут разведены друг от друга на нужное расстояние, стопор 8 вводится в соответствующее отверстие 9.
Убедившись в том, что захваты 3 и 12 находятся в нерабочем положении, можно подвести устройство к контейнеру, подняв его целиком вильчатым погрузчиком, вилы которого следует ввести в балки 23 или 22, соединить захват 3 с верхним угольником контейнера используя для этого установленные на кронштейне направляющие клинья, упира.ющиеся в вертикальные стенки уголъника ко,нтейнера,, перед тем как в него войдет головка захвата, ввести нижний захват 12 в нижний угольник контейнера и запереть захваты 3 и 12 в верхнем и нижнем угольниках контейнера.
Для подъема контейнера необходимо соединить со всеми его угольниками четыре таких устройства и,включив гидропривод стоек 4,поднять все устройства на нужную высоту, например на высоту кузова автомобиля, после чего,убирая стойки 4 внутрь тручатых элементов, опустить контейнер и поставить его на пол кузова автомобиля. Paivbi 20 можно либо оставить на месте, либо снять вильчатым погрузчиком с контейнера.
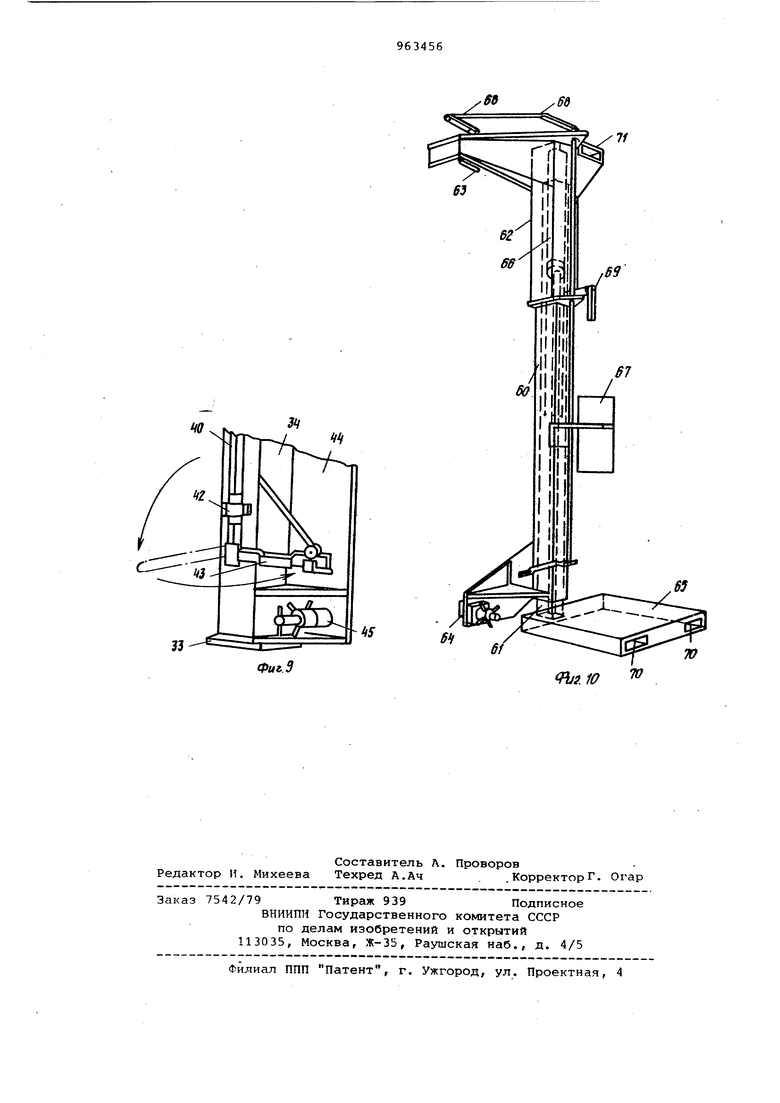
Устройство по второму варианту выполнения (фиг. 5-9) имеет трубчатый элемент 32 некруглого (например квадратного) сечения, выдйижную стойку (не показана) с таким же сечением, которая расположена внутри элемента 32 и имеет на конце опорный башмак 33, и втулку 34, надетую на трубчатый элемент 32 и имеющую возможность перемещаться по высоте вдоль него. Перемещение стойки с башмаком 33 (ее выдвижение и убирание) осуществляется расположенным внутри трубчатого элемента 32 гидроцилиндром (не показан).
В верхней части элемента 32 расположен кронштейн 35 с выступающим вниз захватом 36, который соединяется с верхним угольником контейнера. Управление захватом 36 (его перемещение из положения захвата в свободное положение) осуществляется дистанционно. Рычажная система дистанционного управления захватом выполнена в виде поворотного рычага 37, соединенного звеном 38 с рычагом 39, закрепленным на верхнем конце телескопического квадратного в сечении вала 40, установленного в подшипниках 41 и 42, закрепленных на элементе 32 и втулке 34 соответ ственно. В нижней частИ вала имеется рукоятка 43, которая может фиксироваться в показанном на фиг. 5 положе нии, или поворачиваться вниз, а зате вбок на 90, фиксируясь в этом поло жении (фиг. 9), при котором захват 36 находится в свободном положении (фиг. 8). Такая конструкция позволяет управлять захватом 36 непосредственно с земли. Втулка 34 имеет боковой фланец 44 с нижним захватом 45 и промежуточными захватами 46 и 47. Положение захватов 45-47 относительно захвата 36 можно регулировать, вынимая вьщвижной стопор 48, который установлен на элементе 32, из отверстия 49, выполн енного во втулке 34 (фиг. 7), после чего втулка опускается на башмак 33. В этом положении втулка может перемещаться по высоте одновременно с выдвижением стойки. При этом верхний захват 36 соединяется с верх ним угольником контейнера, а нижние захваты перемещаются по высоте и оди из них подводится к нижнему угольнику контейнера. Устройство имеет маслобак 50,уста новленный на трубчатом элементе 32 (фиг. 5). В маслобаке расположены электроприводной насос 51, электрически управляемый клапанный блок 52 емкость 53, образующие элементы гидросистемы привода гидроцилиндра ноги Для подвода электроэнергии к электродвигателю и клапанам используются розетки 54, расположенные на стен ке кожуха маслобака. На элементе 32 имеются гнезда 55 для вил вильчатого погрузчика, расположенные под маслобаком 50, что позволяет, введя в эти гнезда вилы 56 погрузчика (фкт, 5), поднимать и опускать стойку небольшим по мощности погрузчиком. Подъемник имеет также опоры 57 и 58, расположенные на противоположной от захватов стороне устройства. Опор приварены к элементу 32 и, когда выдвижная стойка полностью убрана, позволяют устройству свободно стоять на земле, при этом центр тяжести уст ройства лежит приблизительно по цент ру между тремя точками опоры, образуемыми башмаком 33 выдвижной стойки и башмаками 59 опор 57 и 58. На фиг. 10 показан третий вариант конструкции устройства, которое состоит из трубчатого элемента 60, расположенной внутри него видвижной сто ки 61, втулки 62, надетой на верхний конец трубчатого элемента, на которо смонтирован верхний захват 63, нижне го захвата 64, закрепленного на нижнем конце трубчатого элемента 60, и опорной плиты 65, закрепленной на конце стойки 61. Стойка перемещается гидроцилиндром 66, расположенным внутри трубчатого элемента и работающим от гидросистемы 67. Опорная плита 65 расположена по другую сторону от захватов 63 и 64 и на нее можно при желании загрузить бетонные блоки,повысив тем самым устойчивость свободно стоящего на земле. Верхний захват управляется рычагами 68 и телескопическим валом. Для фиксации втулки 62 в нужном положении используется выдвижной стопор 69. Очевидно, что в рассмотренные варианты конструкции устройства можно внести различные изменения и усовершенствования. Так, например, устройства, показанные на фиг. 1-4 и 10, можно оборудовать промежуточными захватами (типа захватов 46 и 47,показанных на фиг. 5).В устройстве, показанном на фиг. 10, можно, помимо отверстий 70 под вильчатый захват (в опорной плите) и 71 (во втулке),сделать еще дополнительные (промежуточные по высоте) отверстия такого же типа. Предлагаемое устройство можно использовать в условиях ограниченного пространст ва, оно является простым и удобным в работе, а также легко регулируемым для работы с имеющими различную высоту контейнерами ISO, причем благодаря возможности находиться, будучи в нерабочем состоянии, в свободно стоящем положении, оно может храниться в любой плоскости без использования для этой .цели специальных приспособлений,например стеллажей. Формула изобретения 1. Грузоподъемное устройство, преимущественно, для подъема и опускания контейнеров, содержащее опирающуюся на землю стойку некруглого поперечного сечения, расположенную внутри подвижного трубчатого элемента такого же сечения, захваты для крепления контейнера к устройству, расположенные на одной из сторон последнего, и привод относительного телескопического перемещения стойки и трубчатого элемента, отличающееся тем, что, с целью повышения удобства в эксплуатации, привод включает з себя гидроцилиндр, расположенный внутри трубчатого элемента, гидросистему для подачи масла в гидроцилиндр, смонтированную на трубчатом элементе, который снабжен кронштейном в верхней части и втулкой, подвижно установленной на нем с возможностью фиксации относительно последнего по высоте посредством выдвижного стопора, при этом один из захватов закреплен на упомянутом кронштейне, другой на втулке, а устройство снабжено опорами и поперечными балками для опирания его на землю, причем опоры смонтированы на стороне устройства, протиповоложной расположению захватов посредством поперечных балок. .
Приоритет по признакам:
принятые во внимание при экспертизе
гз
2J
(Puti
13
31
,., 27, .2
16
17
ФигЛ
37
58 58
fif
«f
W
К
Фиг. 7
Фиг. 8
««
Фиг.З
S.10
