Изобретение относится к стендовому оборудованию для комплексных испытании и настройки системы, управления раскладкой витков провода при формообразовании многослойных обмоток на намоточных станках, выпускаемых для радиотехнической, электротехнической и других отраслей.промышленности
Целью изобретения является расшир ние технологических возможностей путем увеличения области исследования формообразования электрических обмоток.
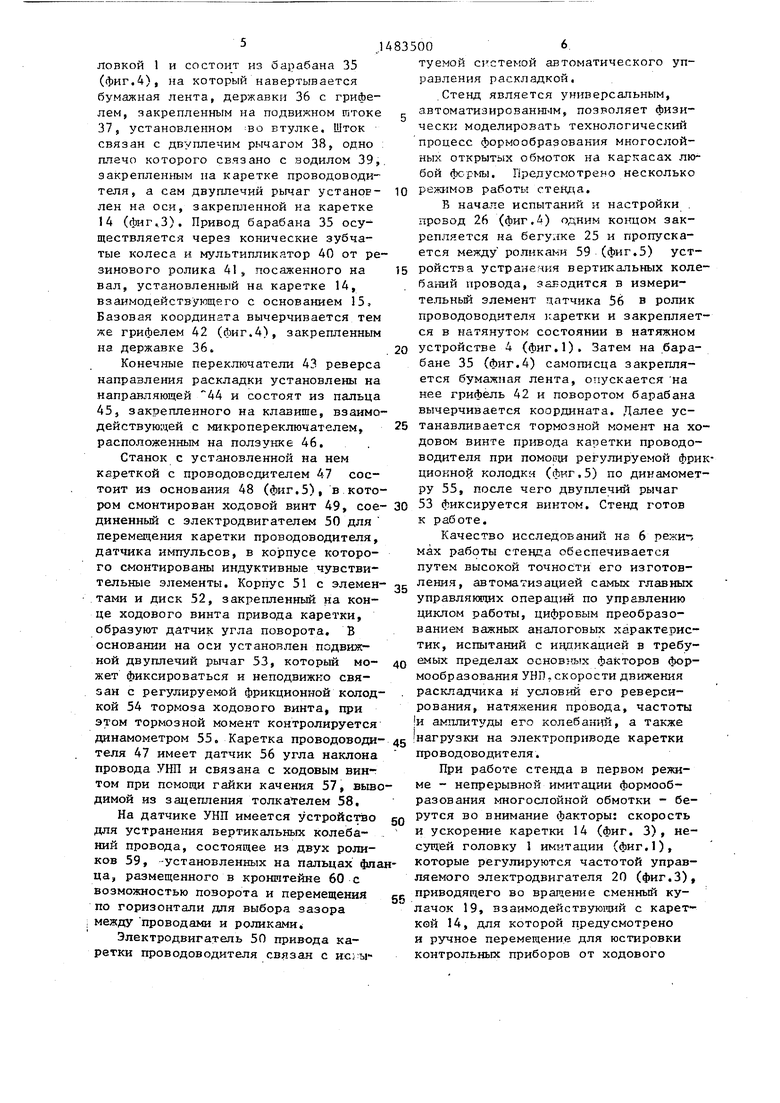
На фиг„1 изображен стенд, общий вид; на фиг.2 - то же, структурная схема; на фиг.3-5 - основные узлы стенда
В состав стенда входят (фиг.1) головка 1 для имитации формообразования гбмотох} станок 2„ на котором установлена каретка проводоводителя, несущая датчик угла наклона провода (УНП), ггектродвнгатель -привода ходового винта кареткиэ фрикционный тормоз 9 импульсный датчик числа или угла поворота винта, переключатели 3 реверса направления раскладки, натяжное устройство 4, электронный счетчик-индикатор 5 угла (числа) поворотов ходового винта, двухкоор- динатный самописец б, блок 7 управления раскладкой станка, пульт 8 управления стендом, осциллограф 9, электросекундомер 10, счетчик 11 циклов,, миллиамперметры, вольтметр 12, а также лабораторный автотрансформатор 13.
Головка для имитации формообразо- вания обмоток предназначена для имитации технологического процесса намотки провода на каркасы различной формы и создания помех работе датчика со стороны провода технологических и конструктивных погрешностей работы механизмов раскладчика, зада
10
15
0
20
25
30
35
45
ния проводу колебаний с различной амплитудой и частотой, а также его подачи в горизонтальной плоскости (имитация намотки слоя провода) и в вертикальной плоскости (имитация воз- растания диаметра обмотки), движения провода вдоль оси (для создания переменного натяжения).
На фиг, 3 изображены каретка 14, помещенная на шариковых опорах в основании 15, которое установлено в стойке 6 с возможностью поворота относительно опоры 17 (на угол до 15). Каретка имеет два раздельных привода - ручной, от холодного винта 18, с точным отсчетом и механический, от сменного кулачка 19 с приводом от электродвигателя 20. В дисковой опоре 21 установлена поворотная ось с направляющей 22, угол поворота которой измеряется по шкале, а ось фиксируется винтом 23.
На направляющей закреплен кронпгг теин 24, несущий штифт, по которому двигается бегунок 25 (фиг,4) с закрепленным на нем концом провода 26, центральное положение которого совпадает с серединой поворотной оси и выверяется винтом 27 (фиг. 3). Бегунок приводится в движение от двуплечего рычага 28 (фиг.4), а величина перемещения (амплитуда колебаний) провода регулируется изменением положения опоры 29 двуплечего рычага относительно направляющей, а также изменением положения кулачка 30 привода этого рычага от электродвигателя 31, установленного на салазках 32 (фиг.З), расположенных на направляющей 22, имеющей консоль, где установлен наконечник 33 с убирающимся визиром 34, служащим для установки провода в горизонтальной плоскости в нейтральном положении относительно датчика УНП.
Двухкоорданатный самописец закреплен на каретке 14 совместно с головкой 1 и состоит из барабана 35 (фиг.4), на который навертывается бумажная лента, державки 36 с грифелем, закрепленным на подвижном штоке 37, установленном во втулке. Шток связан с двуплечим рычагом 38, одно плечо которого свчзано с водилом 39, закрепленным на каретке проводоводи- теля, а сам двуплечий рычаг установлен на оси, закрепленной на каретке 14 (фиг.З). Привод барабана 35 осуществляется через конические зубчатые колеса и мультипликатор 40 от резинового ролика 41, посаженного на вал, установленный на каретке 14,
взаимодействующего с основанием 15, Базовая координата вычерчивается тем же грифелем 42 (фиг.4), закрепленным на державке 36.
Конечные переключатели 4 реверса направления раскладки установлены на направляющей 44 и состоят из пальца 45, закрепленного на клавише, взаимодействующей с микропереключателем, расположенным на ползунке 46.
Станок с установленной на нем кареткой с проводоводителем 47 состоит из основания 48 (фиг.5), в кото15 ройства устранения вертикальных кол баний провода, заг-одится в измерительный элемент датчика 56 в ролик проводоводителя каретки и закрепляе ся в натянутом состоянии в натяжном
2о устройстве 4 (фиг.1). Затем на барабане 35 (фиг.4) самописца закрепляется бумажная лента, опускается на нее грифель 42 и поворотом барабана вычерчивается координата. Далее ус25 танавливается тормозной момент на х довом винте привода каретки проводо водителя при помощи регулируемой фри ционной колодки (фиг.5) по динамомет ру 55, после чего двуплечий рычаг
ром смонтирован ходовой винт 49, сое- 30 53 фиксируется винтом. Стенд готов диненный с электродвигателем 50 для к работе, перемещения каретки проводоводителя, датчика импульсов, в корпусе которого смонтированы индуктивные чувствиКачество исследований нз 6 режимах работы стенда обеспечивается путем высокой точности его изготовтельные элементы. Корпус 51 с элемен- 35 ления, автоматизацией самых главных тами и диск 52, закрепленный на конце ходового винта привода каретки, образуют датчик угла поворота. В основании на оси установлен подвижной двуплечий рычаг 53, который мо- 40 жет фиксироваться и неподвижно связан с регулируемой фрикционной колодкой 54 тормоза ходового винта, при этом тормозной момент контролируется динамометром 55. Каретка проводоводи- 45 нагРУзки на электроприводе каретки теля 47 имеет датчик 56 угла наклона проводоводителя.
провода УНП и связана с ходовым вин- При работе стенда в первом режи- том при помощи гайки качения 57, выводимой из зацепления толкателем 58.
управляющих операций по управлению циклом работы, цифровым преобразованием важных аналоговых характеристик, испытаний с индикацией в требуемых пределах основных факторов формообразования УНП „скорости движения раскладчика и условий его реверсирования, натяжения провода, частоты и амплитуды его колебаний, а также
ме - непрерывной имитации формообразования многослойной обмотки - бе835006
туемой системой автоматического управления раскладкой.
Стенд является универсальным, автоматизированным, позволяет физически моделировать технологический процесс формообразования многослойных открытых обмоток на каркасах любой фермы. Предусмотрено несколько
10 режимов работы стенда.
В начале испытаний и настройки провод 26 (фиг.4) одним концом закрепляется на бегулке 25 и пропускается между роликаьи 59 (фиг.5) уст15 ройства устранения вертикальных колебаний провода, заг-одится в измерительный элемент датчика 56 в ролик проводоводителя каретки и закрепляется в натянутом состоянии в натяжном
2о устройстве 4 (фиг.1). Затем на барабане 35 (фиг.4) самописца закрепляется бумажная лента, опускается на нее грифель 42 и поворотом барабана вычерчивается координата. Далее ус25 танавливается тормозной момент на ходовом винте привода каретки проводо- водителя при помощи регулируемой фрикционной колодки (фиг.5) по динамометру 55, после чего двуплечий рычаг
ления, автоматизацией самых главных нагРУзки на электроприводе каретки проводоводителя.
управляющих операций по управлению циклом работы, цифровым преобразованием важных аналоговых характеристик, испытаний с индикацией в требуемых пределах основных факторов формообразования УНП „скорости движения раскладчика и условий его реверсирования, натяжения провода, частоты и амплитуды его колебаний, а также
При работе стенда в первом режи-
ме - непрерывной имитации формообразования многослойной обмотки - бе

| название | год | авторы | номер документа |
|---|---|---|---|
| Раскладчик провода | 1986 |
|
SU1332398A1 |
| УСТРОЙСТВО ДЛЯ РАСКЛАДКИ ПРОВОДА ПРИ НАМОТКЕ | 1992 |
|
RU2024089C1 |
| Станок для намотки электрических катушек | 1981 |
|
SU1078482A1 |
| Устройство для рядовой много-СлОйНОй НАМОТКи элЕКТРичЕСКиХКАТушЕК МиКРОпРОВОдОМ | 1978 |
|
SU803032A1 |
| Раскладчик провода | 1988 |
|
SU1603448A1 |
| Станок для намотки электрических катушек | 1973 |
|
SU597014A1 |
| Устройство для рядовой многослойной намотки электрических катушек микропроводом | 1973 |
|
SU603011A1 |
| Устройство для раскладки провода к намоточному станку | 1980 |
|
SU942181A1 |
| Станок для намотки электрических катушек | 1979 |
|
SU866594A1 |
| Станок для намотки обмоток электрических машин | 1986 |
|
SU1387112A1 |


Изобретение относится к области электротехники и м.б. использовано в стендовом оборудовании для комплексных испытаний и настройки системы управления раскладкой витков при формообразовании многослойных обмоток на намоточных станках. Целью изобретения является расширение технологических возможностей путем увеличения области исследования формообразования электрических обмоток. В состав стенда входят головка 1 для имитации формообразования обмоток, станок, на котором установлена каретка 14 с проводоводителем, несущая датчик угла наклона провода (УНП), переключатели реверса, самописец. Головка 1 установлена на каретке 14 и связана с бегунком 25, соединенным с концом провода. При колебании бегунка происходит имитация движения провода так же, как при формообразовании обмотки, при этом сигналы с датчика УНП, скорость и ускорение каретки, работа переключателей ее реверса и т.п. регистрируются самописцем, позволяющим исследовать сущность технологических процессов изготовления обмоток на стенках, содержащих систему автоматической стабилизации УНП и устройств активного контроля. 3 з.п. ф-лы, 5 ил.
На датчике УНП имеется устройство 50 рутся во внимание факторы: скорость для устранения вертикальных колеба- и ускорение каретки 14 (фиг. 3), нений провода, состоящее из двух роли- сущей головку 1 имитации (фиг.1), ков 59, -установленных на пальцах флан- которые регулируются частотой управ- ца, размещенного в кронштейне 60 с возможностью поворота и перемещения по горизонтали для выбора зазора между проводами и роликами.
55
яяемого электродвигателя 20 (фиг.З), приводящего во вращение сменный кулачок 19, взаимодействующий с кареткой 14, для которой предусмотрено и ручное перемещение для юстировки контрольных приборов от ходового
Электродвигатель 50 привода каретки проводоводителя связан с ис, ырутся во внимание факторы: скорость и ускорение каретки 14 (фиг. 3), несущей головку 1 имитации (фиг.1), которые регулируются частотой управ-
яяемого электродвигателя 20 (фиг.З), приводящего во вращение сменный кулачок 19, взаимодействующий с кареткой 14, для которой предусмотрено и ручное перемещение для юстировки контрольных приборов от ходового
винта . Всем этим имитируется скорость намотки, т.е. скорость роста длины споя витков провода, зависящая от его диаметра и вращения шпинделя станка, на котором установлен каркас обмотки.
Частота колебаний провода на участ- ком, динамическом (при наличии поке от ка± тки проводоводителя до
голов 1 пегт -лируется частотой вра- 10 |нии провода,
щения гектродвигателя 31, связанно- аким образом, полный охват всех го через ременную передачу со смен- основных узлов и блоков как в отдельным Kvia ом 30, который через дву- ности, так и при совместной работе, плечи - /мчаг 28 и бегунок 25, на кото- широкий диапазон варьирования всех ром з, i член провод 26 (фиг.4), полу-15 основных факторов формообразования чает колебания по разным законам. многослойных обмоток, возникающих при
намотке круглых или прямоугольных каркасов, определяет качество ис-- следований по глубине проникновения 20 и выявления сущности технологического процесса изготовления обмоток на станках, содержащих систему автоматической стабилизации угла наклона провода и устройств активного контроля. настройки датчика 56 (фиг.5) и пов- 25 Точность исследования обеспечивает- торного рычага, через ролик которого ся автоматизацией получения результатов на электронном индикаторе, соединенном с датчиками, установленными, на самом стенде, в виде графиков, 30 выписанных самописцем и привязанных к базовым координатам станка, напАмплагуда колебаний провода регулирует ч изменением положения опор 29 дву.-лечрго рычага 28 относительно эт. го pnfara и направляющей 22 (фиг.З, а также положения салазок 32, находящихся на ней.
Угол наг юна провода устанавливается п заданных пределах путем
пропущен провод, установленного на каретке проводоводителя 47.
Во втором режиме остановка каретки проводоводителя в крайнем левом и правом положениях при ее взаимодействии с пальцами 45 (фиг.4} позволяет исследовать циклическую точность работы механизмов раскладчика по вре- 35
ример направлению перемещения головки имитации и каретки проводоводителя.
i Формула изобретения
мени,
лне хода, стабильности УНП.
В третьем режиме предусмотрена остановка каретки проводоводителя через два цикла для получения харак- 40 теристики работы раскладчика с учетом переходного процесса при реверсировании направления раскладки по времени, величине перерегулирования, приемистости электропривода каретки про- 45 водоводителя при различных нагрузках, длительности переходных процессов и их формы.
В четвертом режиме можно исследовать параметры согласования всех блоков управления намоткой, входящих в единую систему автоматической стабилизации УНП, включающую в устройство активного контроля качества формообразования по появлению нахлес- « та витков, и определить необходимые значен г тих параметров.
В пятом режиме исследуется каждый в oTji m,ности параметр устройст50
ва активного контроля, устанавливаемого как на станках, содержащих систему автоматической стабилизации, так и на обычных станках.
На шестом режиме испытываются датчики УНП различных типов в статичесмех) режимах и при различном натяже5
0 5
0
ример направлению перемещения головки имитации и каретки проводоводителя.
i Формула изобретения
I, Стенд для испытания системы управления намоточных станков, содержащий механизм формообраз-ования обмоток, каретку проводоводителя с ходовым винтом и приводом, фрикционный тормоз и контрольно-измерительные приборы, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения области исследования формообразования электрических обмоток, он снабжен головкой для имитации формообразования обмоток, выполненной в виде дисковой опоры с поворотной осью, на конце которой установлен направляющий элемент с кронштейном, несущий бегунок для воздействия на провод, , установленный с возможностью перемещения в вертикальной и , горизонтальной плоскостях, и двуплечий рычаг, конец которого несет кулачок , снабженный приводом его вращения, а другой конец связан с бегунком, при этом дисковая опора установлена на каретке.
винт каретки проводоводителя снабжен датчиком угла поворота и связан с фрикционным тормозом.
Фиг. 1
SO
ss
91
Фие, 5
| Парнес М.Г | |||
| Расчет и конструирование намоточных станков, М.: Машиностроение, 1975, с | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
| Рыбников С.И | |||
| Автоматическое управление намоткой | |||
| М.: Энергия, 1972, с | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
