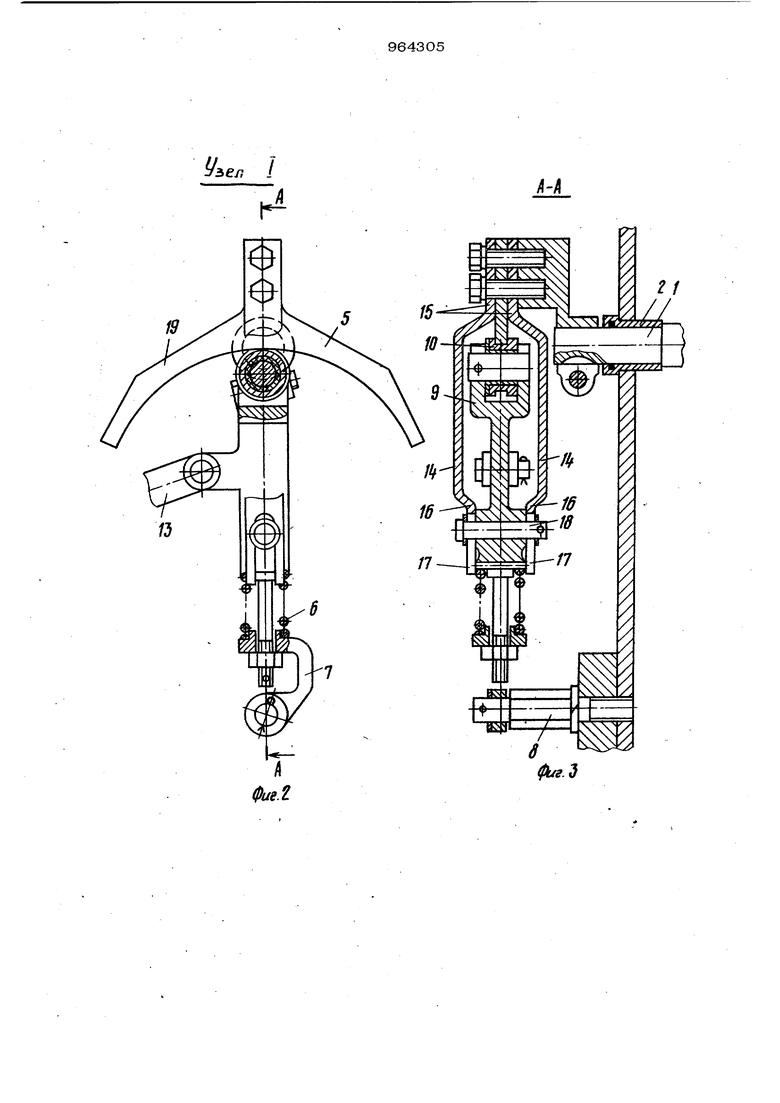
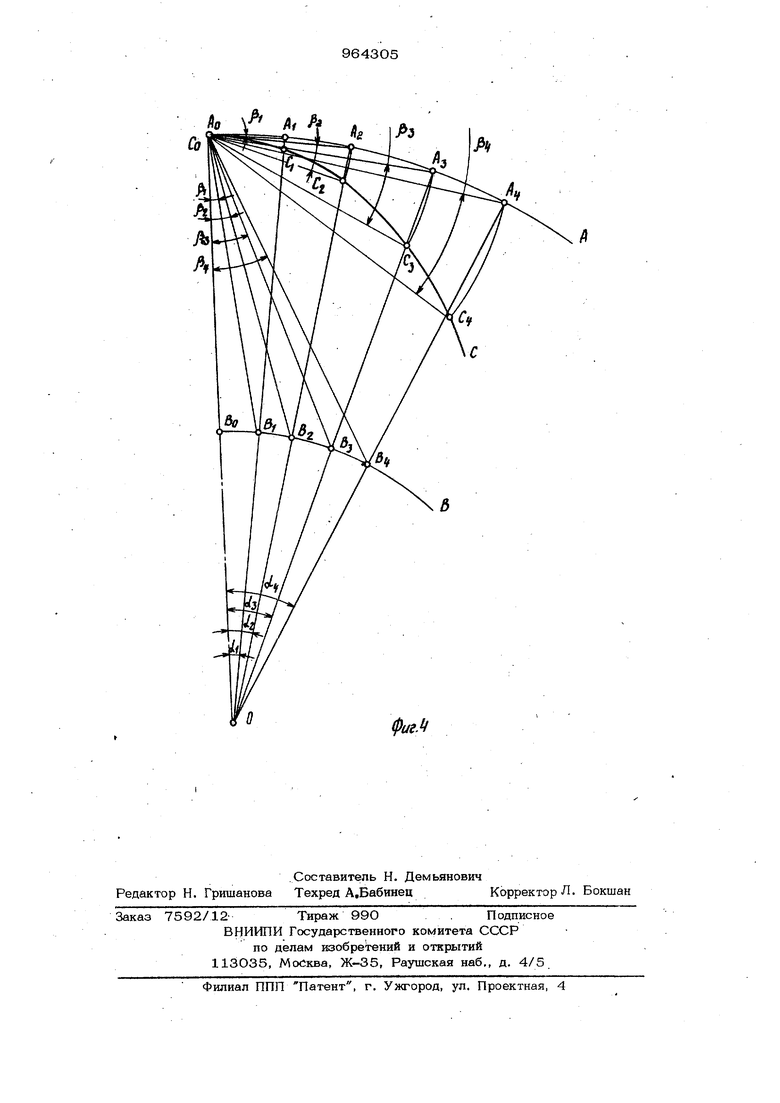
(54) МЕХАНИЗМ УПРАВЛЕНИЯ ТОРМОЗНЫМИ Изобретение относится к машиностроению, в частности к механизмам управления тормозными и аналогичными устройствами. Известно устройство для затяжки ленточного тормоза, -содержащее двуплечий рычаг, установленный с возможностью качания на неподвижной опоре, одно плечо которого связано тягой с тормозящим элементом, а другое криволинейной поверх ностью контакта - с силовым элементом, установленным с возможностью качания на второй неподвижной опоре, и рычаг управпения, связанный с силовым элемен- . Недостатком данного решения является ухудшение условий эксплуатации и снижение надежности при износе тормоза, cooi ветственно из-за увеличения усилия управ ления и снижения тормозного момента. Наиболее близким к предлагаемому является механизм управления, содержащий двуплечий рычаг, установленный с УСТРОЙСТВАМИ возможностью качания на неподвижной опоре, одно плечо которого связано тягой с тормозящим элементом, а другое криволинейной поверхностью контакта - с силовым элементом, установленным с возможностью качания на второй неподвижной опоре и связанным тягой с рычагом управления, а также дополнительный рычаг, один конец которого снабжен направляющей, взаимодействующей с поводком на силовом элементе, и пружинный элемент возврата механизма в исходное положение 2 . При работе механизма из-за износа тормозного устройства угловой поворот двуплечего рычага от вьжлюченного положения к включенному сопровождается смещением криволинейной поверхности контакта от номинального положения и к изменению длины силового элемента при взаимодействии его конца с криволинейной поверхностью контакта двуплечего рычага. Данная деформация силового элемента требует приложения возрастающей по мере износа тормоза дополнительной управляющей силы для возвращения механизма в исходное положение, что ухудшает условия эксплуатации, кроме того, в связи с тем, что плечо приложения управляющей нагруз ки от силового элемента остается постояв ням, происходит уменьшение )зазвиваемого тормозом момента, что снижает надежнос его работы. Цель изобретения - улучшение условий эксплуатации при одновременном повышегНИИ надежности соответственно за счет обеспечения постоянтсва усилия управления и развиваемого тормозного момента, Поставленная цель достигается тем, что в механизме управления тормозными устройствами, содержащем двуплечий рычаг, установленный с возможностью качания на неподвижной опоре, одно плечо которого связано тягой с тормозящим эле- ментом, а другое криволинейной поверхностью контакта - с силовым элементом, установленным с возможностью качания на второй неподвижной опоре и связанным тЯ rofi с рычагом управления, а также дополнительный рычаг, один конец которого снабжен направляющей, взаимодействующей с поводком на силовом элементе, дру гой конец дополнительного рычага жесрсо связан с двуплечим рычагом, а криволинейная поверхность контакта двуплечего рычага с силовым элементом представляет собой геометрическое место точек положений конца силового элемента при ус. ловии постоянства длины последнего. На фиг. 1 изображена принципиальная схема предлагаемого MexiannaMa; на 4я1Г.2 узел I на фиг. 1; на фиг. 3 - разрез А-А на фиг. 2 ; на фиг. 4 - пример по- строения криволинейной поверхности свободного плеча двуплечего рычага. Механизм содержит двуплечий рьиаг 1 установленный на неподвижной опоре 2, одно плечо 3 которого связано с тормозным устройством 4, а другое 5 выполнено криволинейным, силовой элемент 6, ус тановленный одним концом в направляюще 7 на второй неподвижной опоре 8 и снабженный на другом конце 9 роликом 10, перемещаемым по криволинейной поверхности плеча 5, рычаг управления 11, установленный на неподвижной опоре 12 и связанный тягой 13 с силовым элементом 6 или с двуплечим рычагом 1 (не пока зано). Дополнительный рычаг 14 одним концрм 15 жестко связан с двуплечим рычагом 1, а на другом его конце 16 выполнена направляющая 17, взаимодействующая с поводком 18, вьшолненным на силовом элементе 6, или, наоборот, поводок 18 может быть вьшолнен на дополнительном рычаге 14, а направляющая 17 на силовом элементе 6 (не показано). Кроме того, двуплечий рычаг 1 может быть снабжен дополнительным плечом 19, выполненным симметрично плечу 5 и служащим для управления вторым тормозным устройством 20, а механизм может быть снабжен упругим элементом 21, связанным с неподвижной опорой 12 и силовым Элементом 6, или с двуплечим рычагом 1, или с другими элементами, связанными с ними (не показано). Криволинейная поверхность контакта двуплечего рычага 1 с силовым элементом 6 представляет собой геометрическое место точек положений конца 9 силового элемента 6 при условии постоянства длины последнего. Построение кривой плеча 5 двуплечего рычага 1, взаимодействующего с концом 9 силового элемента 6, производится следующим образом. Откладываются точки АО и О - центры неподвижных опор 2 и 8 двуплечего рычага 1 и силового элемента 6, точка БДначальное положение поводка 18, и проводятся с центром в точке О окружности Дд Д и ВдВ - траектории движения конца 9 силового элемента 6 и поводка 18. Первая точка кривой Сд находится в точке AQ. Для построения других точек SC , С«2 и т. д; из точки о откладьтаются произвольные углы (jL , о. и т. д. поворота силового элемента 6, образующие на окружности АоД точки А , Аа и т. д. являющиеся точками контакта плеча 5 поворачивающегося двуплечего рычага 1 и конца 9 силового элемента 6. При повороте силового элемента 6 на углы (д. , 0 и «. д. поводок 18 за счет направляющей 17 и дополнительного рычага 14 поворачивает двуплечий рычаг 1 и плечо 5 на углы р , и т. д., снося на которые точки А, Д, т. д., получаются точки .С , т, д., являющиеся точками криволинейной поверхности плеча 5 двуплечего рычага 1. На практике для получения кривой может использоваться приспособление, аналогичное механизму| . при этом вместо ропкк.а устанавливается режущий инструмент, при вращении которого производится обработка требуемой криволинейной поверхности. Механизм работает следующим образом. При перемещении посредством рычага 11 управления силового элемента б из йоложения, показанного штриховой линией в положение, показанное сплошной линией дополнительн1з1Й рычаг 14, двигаясь по направляющей 17 совместно с поводком 18, прворачивает двуплечий рычаг 1 до выбора зазора в тормозномустройстве 4, jipn этом ролик 10, перекатьтаяс по криволинейной поверхности плеча 5, движется по окружности, в результате чего силовой элемент б не изменяет сво ей длины и усилие на рычаге 11 управления сохраняется постоянным минимальным. После выбора зазора в тормозном устройстве 4 ролик Ю оказывается на н котором расстоянии от неподвижной опо- ры 2, в результате чего от силы разжатия силового элемента б образуется определенный момент, необходимый для вкл чения тормозного устройства 4. При износе тормозного устройства 4 перемещение двуплечего рычага 1 для вы бора появившегося дополнительного зазора увеличивается и ролик 10 силового элемента б должен перекатываться на большее расстояние от неподвижной опоры 2, в результате чего момент за- тяжки тормозного устройства 4 возрастает, но усилие на рычаге 11 управления при этом остается постоянным, так как ролик 10 продолжает движение по окружности и силовой элемент б не деформируется. Работа механизма при управлении вторым тормозным устройством 20 аналогичная описанной, . при этом ролик 1О силового элемента 6 перемещается по дополнительному плечу 19 двуплечего рычага 1. Обеспечение автоматического вьпсл1Очения тормозного устройства 4 осуществляется за счет упругого элемента 21, ве личина усилия которого должна несколько превьппать усилие управления, сущесттеую- шее при отсутствии данного дополнительного упругого элемента 21. Таким образом, введение предлагаемых известный механизм управ-изменений в /ления тормозными и аналогичными устройствами обеспечивает улучщение условий его эксплуатации путем обеспечения постоянства усилия управления при одновременном повышении надежности работы. Следует отметить, что предлагаемый механизм может быть использован для управления двумя тормозными устройствами и обеспечивает автоматическое выключение тормозного устройства. Формула изобретения Механизм управления тормозными устрйствами, содержащий двуплечий рычаг, установленный с возможностью качания fta неподвижной опоре, одно плечо которого связано, тягой с тормозящим элементом, а другое криволинейной поверхностью контакта - с силовым элементом, установленным с возможностью качания на второй неподвижной опоре и связанным тягой с рычагом управления, а также дополнительный рычаг, один конец которо|;о снабжен направляющей, взаимодействующей с поводком на силовом элементе, отличающийся тем, что, с целью улучшения условий эксплуатации при одновременном повышении надежное- ти соответственно за счет обеспечения постоянного усилия управления и развиваемого тормозного момента, другой конец дополнительного рЫчага жестко связан с двуплечим рычагом, а криволинейная поверхность контакта двуплечего рычага с силовым элементом представляет собой геометрическое место точек положений конца силового элемента при условии постоянства длины последнего. Источники информации, принятые во внимание при экспертизе , Авторское свидетельство СССР № 415422, кп. ,F 16 Т) 49/10, 1972. 2. Патент фРГ № 85О846, кл. 63 с 16/03, опублик. 1952 (протип). Уъег, I фиг.д
fio Л. Д
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для затяжки ленточного тормоза | 1979 |
|
SU868178A2 |
| Приводной механизм тормоза | 1979 |
|
SU898174A1 |
| Многошпиндельный токарный автомат | 1979 |
|
SU933269A1 |
| ИСКУССТВЕННЫЙ КОЛЕННЫЙ СУСТАВ | 2021 |
|
RU2763255C1 |
| Центробежный регулятор частоты вращения двигателя внутреннего сгорания | 1989 |
|
SU1657702A1 |
| УСТРОЙСТВО ДЛЯ ПОПЕРЕЧНОЙ РЕЗКИ ГОФРОКАРТОНА | 2003 |
|
RU2255840C1 |
| УСТРОЙСТВО ДЛЯ БЕЗОСТАНОВОЧНОЙ ПОПЕРЕЧНОЙ РЕЗКИ ГОФРОКАРТОНА | 2004 |
|
RU2257282C1 |
| РОЛИКОВЫЕ КОНЬКИ (ВАРИАНТЫ) | 2004 |
|
RU2301100C2 |
| Устройство для подачи ленточного и полосового материала в рабочую зону пресса | 1989 |
|
SU1706763A1 |
| Колодочный тормоз нормально-замкнутого типа с автоматическим регулированием тормозного момента подъемно-транспортных машин | 1984 |
|
SU1171617A1 |