1
Изобретение относится к силоиз|Мерительной технике, а именно к устройствам для контроля усилия фрикционного сцепления штепсельных разъемов .
По основному авт. св. № 885831 известно устройство для контроля усилия фрикционного сцепления в гнездах штепсельных разъемов, содержащее электромагнит с сердечником и калиброванный штырь с якорем, расположенным с одной стороны сердечника и дополнительный якорь, размец енный с другой стороны сердечника, в котором силы притяжения якорей к сердечнику служат Мерой определяемого усилия D3.
Целью изобретения является обеспечение автоматического контроля усилия фрикционного сцепления в гнездах штепсельных разъемов.
Указанная цель достигается тем, что устройство для контроля усилия фрикционного сцепления снабжено автоматическим блоком позиционирования гнезда разъема в плоскости, перпендикулярной направлению расчленения, приводом для перемещения электромагнита в вертикальной плоскости, прогт раммным, и регистрирующим блоками, а в электромагнит введены датчики положения якорей, причем выход программного блока связан с блоком позиционирования, с приводом для перемеще10ния электромагнита и с входом регистрирующего блока, а регистрирующий блок связан с выходом датчиков положения.
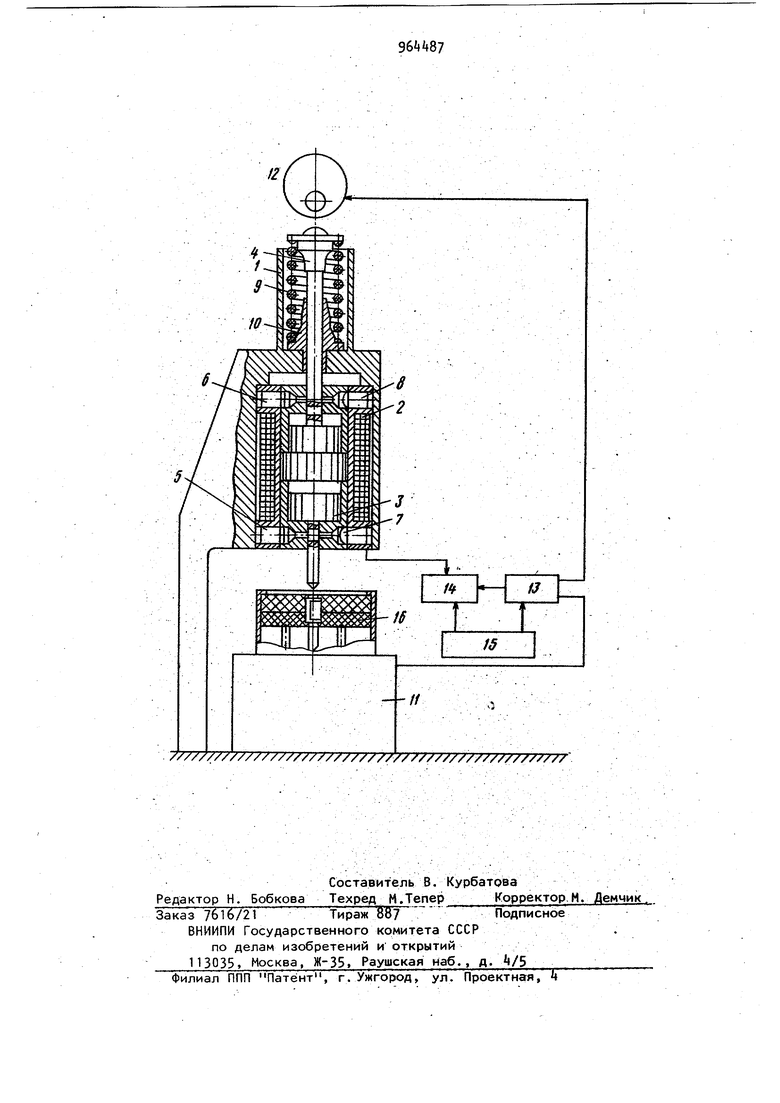
На чертеже представлен пример
15 конструктивного выполнения устройства.
Оно содержит стойку 1, электромагнит 2, калибр с якорем 3 якорь k, фотодиоды 5 и 6, источники 7 и 8
20 света, возвратный механизм, состояш.ий из пружины 3 и направляющей втулки 10, блок 11 позиционирования гнезда разъема в горизонтальной плоскоети.привода для перемещения электромагнита по вертикальной оси, выполненного в виде шагового двигателя с эксцентриком 12 на валу, программный блок 13, регистрирующий блок 1А блок 15 питания. Устройство работает следующим образом. Контролируемый разъем 16 устанавливается на стол блока 11 позиционироаания в нулевой точке, после чего включается программный блок13, с которого подается ряд команд: I - на позиционирование первого, гнезда разъ ема 16 относительно продольной оси калиб эа якоря 3 на перемещение элек тромагнита 2 в стойке 1 до сочленени контролируемого, гнезда разъема 16 с калибром якоря 3 за счет нажатия экс центрика 12 на Ц; V включе;ние датчиков 5 и 6 положения, возврат электромагнита 2 а исходное положение за счет возвратного устройства 9 и 10 до момента расстыковки контролируемого гнезда с калибром. КомандыЧ и II проходят при поданном питании на катушку электромагнита 2, при этом в первоначальном положении якоря 3 и k притянуты к сердечнику электромагнита соответственно силами F,, и F,,, одна иэ которых выбрана равной нижнему, а вторая - в ерхнему пределам заданного диапазона конт0олируемых усилий. При ttoflaMe команды П возможны три положения якорей относительно сердечника электромагнита: ни один из якорей не оторвался от сердечника электромагнита; оба якоря оторвались От сердечника электромагнита 2 и только один из якорей, сила притяжения которого равна нижнему пределу диапазона контролируемых усилий оторвался от сердечника. Третье положение системы указывает на то, что сила фрикционного сцепленйя контролируемого гнезда в разъ еме находится в заданном диапазоне сил, оно призна.ется годным, в первом случае сила фрикционного сцепления меньше, во втором - больше заданной. Эти три положения системы фиксируютс датчиками 5 и 6 положения, сигналы с которых поступают на регистрирующее устройство Ш. Регистрирующее устройство печатает порядковый номер контролируемого гнезда и соответствующий знак, определяющий положение блока; знак минус соответствует первому положению системы, знак: плюс - второму, пробел - третьему. По окончании регистрации измерения программный блок дает команду на контроль следующего гнезда в разъеме и все операции контроля повторяются вновь. После контроля последнего i гнезда разъема программный блок приводит устройство в исходное положение , система обесточивается. Применение предлагаемого устройства позволяет повысить качество контроля, за счет исключенияСубъективных факторов, вносимых в процесс контроля оператором. Ведение контроля в автоматическом режиме позволяет сократить время контроля. Формула изобретения Устройство для контроля усилия фрикционного сцепления по авт. св. Н 885831, от ли чающее с я тем, что, с целью обеспечения авто-, матического контроля, оно снабжено автоматическим блоком позиционирования, гнезда разъёма в плоскости, пер.пендикулярной направлению расчленения, приводом для перемещения электромагнита в.вертикальной плоскости, программным и регистрирующим блоками, а в электромагнит введены датчики положения якорей, причем выход программного блока связан с блоком позиционировани)я, с приводом для перемещения электромагнита и с входом регистрирующего блока, а регистрирующий блок связан с выходом датчиков положения. .- /. . Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 885831, кл. G 01 L 1/0, 1980.
//
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля усилия фрикционного сцепления | 1980 |
|
SU964486A2 |
| Устройство для контроля усилия фрикционного сцепления | 1980 |
|
SU885831A1 |
| Устройство для контроля усилия фрикционного сцепления | 1975 |
|
SU539230A1 |
| Устройство для контроля усилия фрикционного сцепления штепсельных разъемов | 1976 |
|
SU623117A1 |
| УСТРОЙСТВО ДИНАМОМЕТРИЧЕСКОГО ТИПА ДЛЯ ИСПЫТАНИЯ МНОГОЗВЕННЫХ ФРИКЦИОННЫХ МНОГОШТЫРЬКОВЫХ РАЗЪЕМОВ, НАПРИМЕР ШТЕПСЕЛЬНЫХРАЗЪЕМОВ | 1966 |
|
SU179042A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ УСИЛИЙ ФРИКЦИОННОГО СЦЕПЛЕНИЯ | 1972 |
|
SU354294A1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1989 |
|
SU1743654A1 |
| ЭЛЕКТРОСТОРОЖЕВОЕ УСТРОЙСТВО | 1994 |
|
RU2086168C1 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1976 |
|
SU698684A1 |
| Устройство для контроля усилия фрикционного сцепления | 1973 |
|
SU546794A1 |