(54) ОБДИРОЧНО-ШЛИФОВАЛЬНЫЙ СТАНОК
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОДОЛЬНО-ОБРАБАТЫВАЮЩИЙ СТАНОК | 1973 |
|
SU407722A1 |
| Линейный электрический двигатель | 1978 |
|
SU792510A1 |
| Линейный электрический двигатель | 1978 |
|
SU792511A1 |
| Двухкоординатный линейный электродвигатель | 1979 |
|
SU942218A1 |
| Двухкоординатный электрический двигатель | 1980 |
|
SU972637A1 |
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| АГРЕГАТНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК И НАСАДКА К НЕМУ | 1999 |
|
RU2161554C1 |
| Электрический двигатель | 1978 |
|
SU890527A1 |
| Линейный синхронный электродвигатель | 1991 |
|
SU1815755A1 |
| Линейный электрический двигатель | 1978 |
|
SU1037386A1 |
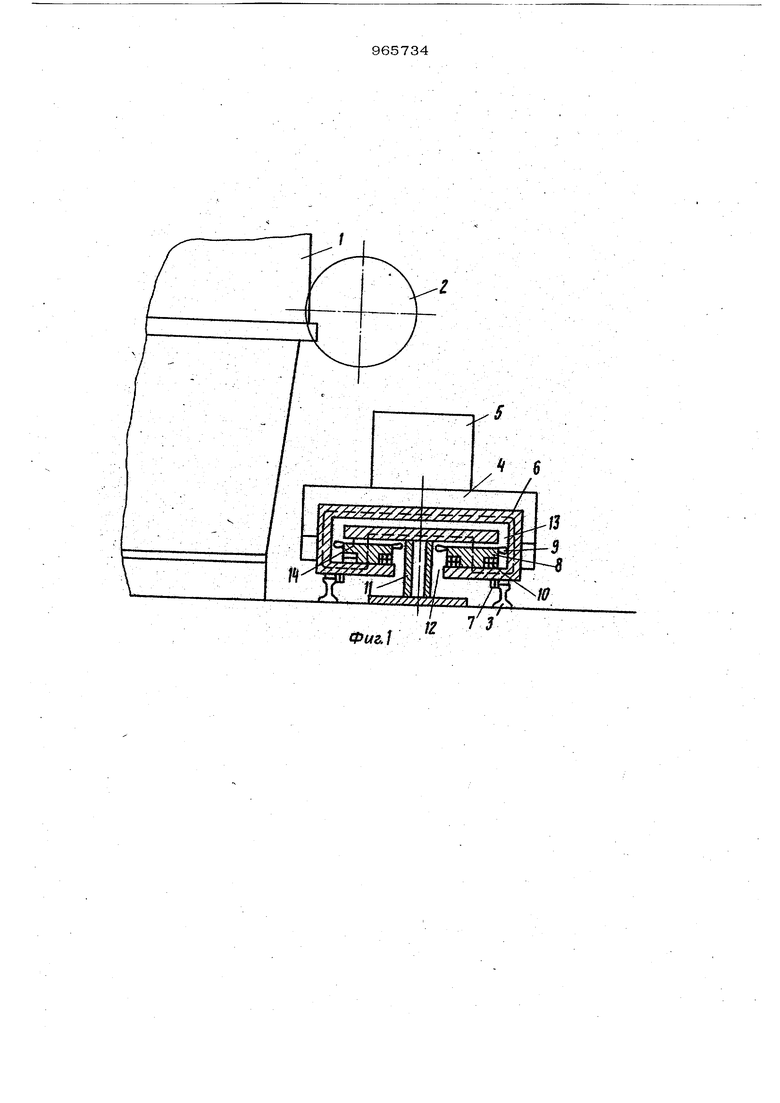
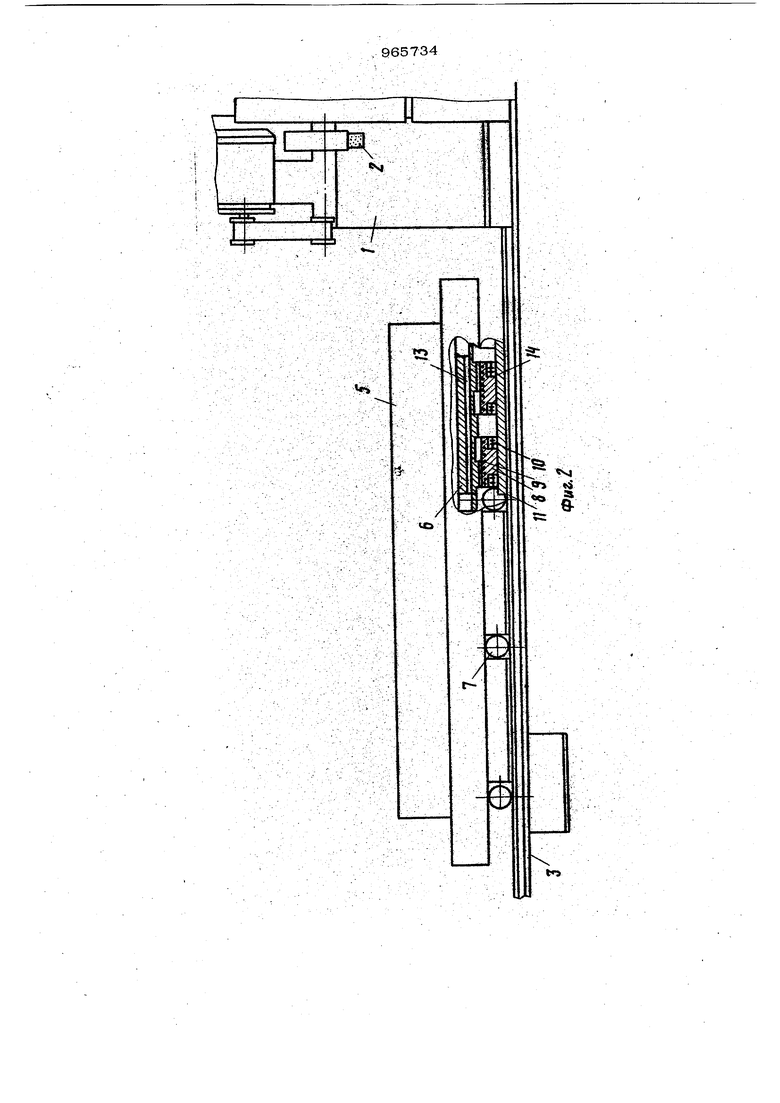
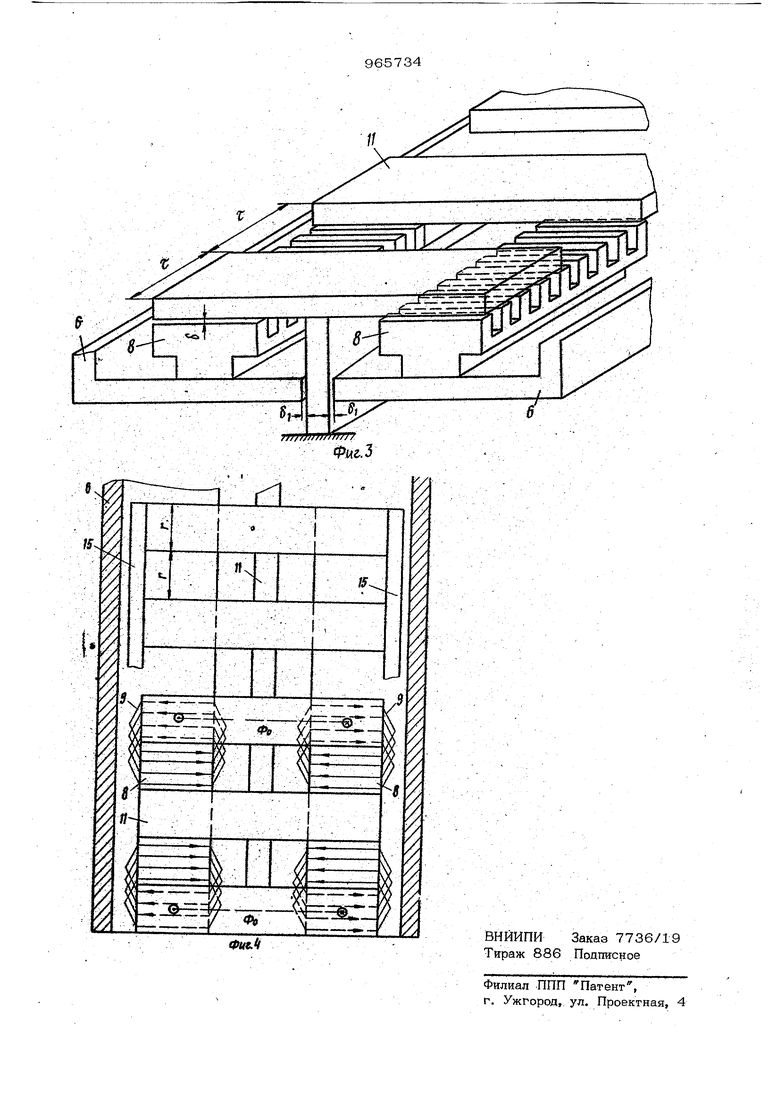
Изобретение относится к станкостроению, в частности к станкам для обработки проката. Известнь обдирочно-шлифовальные станки, содержащие неподвижную колонну со шлифовальной бабкой и перемещающийся по рельсовому пути подвижный стол с приводом поступательного движения 1} В этих станках для перемещения стола применяются сложные механические системы, преобразующие вращательное двт жениё приводного электродвигателя в возвратно-поступательное перемещение стола. Псыимо сложности :кинематики .:; эти системы привод-стол обладают целым рядом недостатков: люфты, повышен ный износ, продольш.1е колебания стола, его выпучивание, особенно при реверсах, что обусловлено сосредоточением приложения усилия к столу. Рещение задачи преобразования вращательного движения электродвигателя в возвратно-поступател ное движение стола и закрепленной на нем детали с достаточно низкой скоростью усложняется большиК-ш длинами хода стола (до 1О м и более), значительными статическими нагрузками на привод и затягиванием процессов его пуска и торможения вследствие больших масс перемещаемых узлов (до 22ООО кг и более).Многоступенчатое преобразование электроэнергии в энергию возвра;тнопоступательного перемещения стола пр водит к снижениюкоэффициента полезного действия привода и, следовательно, умень; шению его экономичности. Целью изобретения является уменьше-; ние мощности привода, за счет частичного уравновешивания веса подвижных частей силами рдностороннего электромагнитного притяжения. Цепь достигается тем, что стол снабжен кронштейнами, а привод поступательного движения стола выполнен в виде линейного двигателя постоянного тока, содержащего модули с обмоткой якоря. длиной в два полюсных деления двигателя, установленные в кронштейнах стола, снабженных обмоткой возбуждения, и неподвижную Т-образную стойку, установленную симметрично относительно направления движения стола, причем верм тикальная часть Т-образной стойки расп ложена в воздушном зазоре между н&рабочими поверхностями модулей, а горизонтальная - воздушном зазоре между нижней поверхностью стола и рабочими поверхностями модулей двигателя, образуя с ними переменный рабочий воздушный зазор с шагом, равным двойному полюсному деленшо двигателя, при этом направление действия тягового усилия параппельно направлению перемещения стопа. . На фиг. 1 изображен обдирочно-шлив вальный станок,- вид сбоку; на фиг. 2 то же, вид спереди; на фш. 3 - конструкция линейного двигателя обдирочношлифовального станка, спрощено; на фиг 4 - Л1йнейный двигатель обдирочно-шл фрвального , вид в штне. Станок состоит из неподвиясной колон ны 1 со шлифовальной бабкой 2 и перемещающегося, по рельсовому пути 3 подвижного стола 4 с закреплённым на не изделием 5. К нижней части стола по ег длине пршсреплены кронштейны 6, имеющие горизонтальные участки, расположен .Hbie симметрично относительно направления перемещения стола. На обращенной к столу поверхности горизонтальных уча тков крогш1тейнов 6 на протяжении длины стола между его колесными опора ми 7 установлены модули линейного двигателя постоянного тока 8, каждый из которых имеет обмотку якоря 9 длиной в две полюсных деления двигателя и обмот ку возбуждения 10. Модули линейного двигателя установлены таким образом, что направление действия их тягового усилия параллельно направлению перемещения стола. На основании, на котором проложен рельсовый путь 3, на протяжении всего хода стола 4 установлена неподвижная стойка 11, являющаяся неподвижной частью двигателя и имеющая Т-образное сечение, симметричное относительно направления перемещения стола причш«1 вертикальная часть Т-обрйзной стойки расположена в воздушном зазоре 12 между нерабочими поверхностями модулей, а горизонтальная часть расположена в воздушном зазоре 13 между нижней Новбрхн6с1ью стола и рабочим и поверхностями модулей двигателя, образуя с ними переменный рабочий воздуиьный зазор 14с шагом, равным двойному полюсному делению двигателя. Горизонтальная часть стойки 11 может представлять собой пластины шириной Т , расположенные на расстоянии Т друг от друга, как показано на фиг. 3 и 4, либо полосу переменного сечения с шагом, равным 2С, как показано на фиг. 2. Толщина горизонтальной части неподвижной стойки Т-обраЗного сечения выбирается из, условий возможности проведения расчетного магнитного потока Ф° и обеспечения жесткости конструкции при воздействии электромагнитных усилий притяжения между горизонтальной частью стойки (пассивной частью двигателя) и модулем (активной частые двигателя) . Если жесткость горизонтальной части стойки может быть обеспечена при меньшей толщине, чем это .необходимо для проведения магнитного потока, то вдоль стойки 11 по всей длине хода двигателя на торцах ее горизонтальной части крепится стальная плаНка 15, выполняющая роль шунта для магнитного потока. Предложенная компановка стола с линейным двигателем позволяет скомпенсировать вес стола и закрепляемого на нем изделия благодаря электромагнит-, нбму притяжению модулей .линейного двигателя 8 и горюбнтальным частям стойки 11. При этом снижаются статические нагрузки на привод и в результате возможно уменьшить жесткость и металлоемкость ряда узлов станка.. Одновременно обеспечивается возможность снизить мощность приводного двига теля. G целью .сокращения высоты модулей линейного двигатели обмотки их возбуждения возможно располагать ша горизонтальных либо вертикальных участках кронштейнов 6 крепления модулей. При подаче напряжения на обмотки возбуждения модулей Ю в воздушном зазоре 14 двигателя соадается магнитньтй поток Ф , замыкающийся через модули 8 горизонтальную часть Т-обрааной стойки 11 и кронштейн 6. Подача напряжения на обмотки якорей 9 модулей производится с помощью коммутатора (контактного щетки-коллектор, либо бесконтактного датчики положения - полупроводниковой коммутатор), не показанного на черт&жах. При подаче напряжения на двигатель токи якорей, взаимодействуя с магнитными потоками обмоток возбуждения, создают тяговое усилие, параллельное направлению перемещения стола 4. Одновременно якори двигателя создают усилие пр№тяжения к горизонтальным участкам Т образной стойки, компенсирующее вес подвижных частей. При движении стола коммутатор осуществляет переключение подсоединенных к нему секций обмоток якорей. При подходе стола к своему крайнему положению полярность напряжения на якорных обмотках меняется и стол дв жется в обратном направлении. Изменяя величину напряжения, подаваемого на обмотки якорей, можно регулировать скоч рость перемещения стола. Магнитный по ток Ф., проходя через воздушный зазор 14, создает электромагнитное усилие тяжения обеих частей двигателя (активноймодуля и пассивной - горизонтальной чаоти стойки) друг к другу, компенсирующее вес подвижных элементов.
Это позволяет значительно уменьшить статические нагружен на привод, снизить треьование к жесткости конструкции, уменьшить металлоемкость ряда узлов станка, улучшить динамические характеристики привода в целом. Одновремевно снижаются нагрузки на колесные опоры и рельсовые пути, что приводит к уменьшению их износа. С целью уменьшения сечения и веса горизонтальных участ ков кронштейнов крепления модулей двигателя возможно предусмотреть между горизонтальными участками кронштейнов и вертикальной частью неподвижной Тобраэной стойки минимальные конструктив во реализугалле воздушные зазоры (см. фиг. 3). Однако, в этом случае необходимо выдерживать заданные рабочие зазоры «Г и if и в двух взаимно перпендикулярных плоскостях по всей длине хода стола, что является довольно слгак- ной технологической задачей. В связи с этим такое решение может быть применено лишь в станках с небольшой длиной хода стола.
Таким образом, предложенное изобретение позволяет упростить конструкцию привода стола, снизить ее металлоемкост и уменьшить мощность привода за с«1ет
частичного уравновешивания веса подвижных частей силами одностороннено мапнитного притяжения.
Формула изобретения
Обдирочно-шлифовапьный станок, соде| :жащвй неподвижную колоШу со шлифовальI ной бабкой и перемещающийся по рельсовому пути подвижный стол с приводом гоступательного движения отличающийся тем, что, с целью шения мощности привода, за счет /частичного уравновешивания веса подвижных час тей силами одностороннего электромагнит ного притяжения, стол снабжен крошитейнами, а привод поступательного двнж&ния стола выполнен в виде линейного дввгателя постоянного тока, содержащего модули с охоткой якоря длиной в два полюсных деления двигателя, установленные в кронштейнах стола, снабжеввых о моткой возбуждения и неподвижную Т- образную стойку, установленную симмеррично относительно направления движения стола, nptneM вертикальная часть Тобразной стойки расположена в воздуиьном зазоре между нерабочими поверхвоотями модулей, а горизонтальная - в воздушном зазоре между нижней поверхноотью стола и рабочими поверхностями модулей двигателя, образуя с ними переменный рабочий воздушный зазор с , равным двойному полюсному нию двигателя, при этом направление действия тягового усилия параллельно направ лению перемещения стола.
Источвики ивформации, принятые во внимавие при экспертизе
