(54) ДВУХКСЮРДИНАТНЫЙ ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| Многокоординатный шаговый электродвигатель | 1982 |
|
SU1080240A1 |
| Двухкоординатный электрический двигатель | 1980 |
|
SU972637A1 |
| Двухкоординатный электрический двигатель | 1982 |
|
SU1083302A1 |
| Двухкоординатный электрическийдВигАТЕль | 1979 |
|
SU849389A1 |
| Двухкоординатный шаговый электродвигатель | 1983 |
|
SU1201971A1 |
| Двухкоординатный электродвигатель постоянного тока | 1980 |
|
SU1037384A1 |
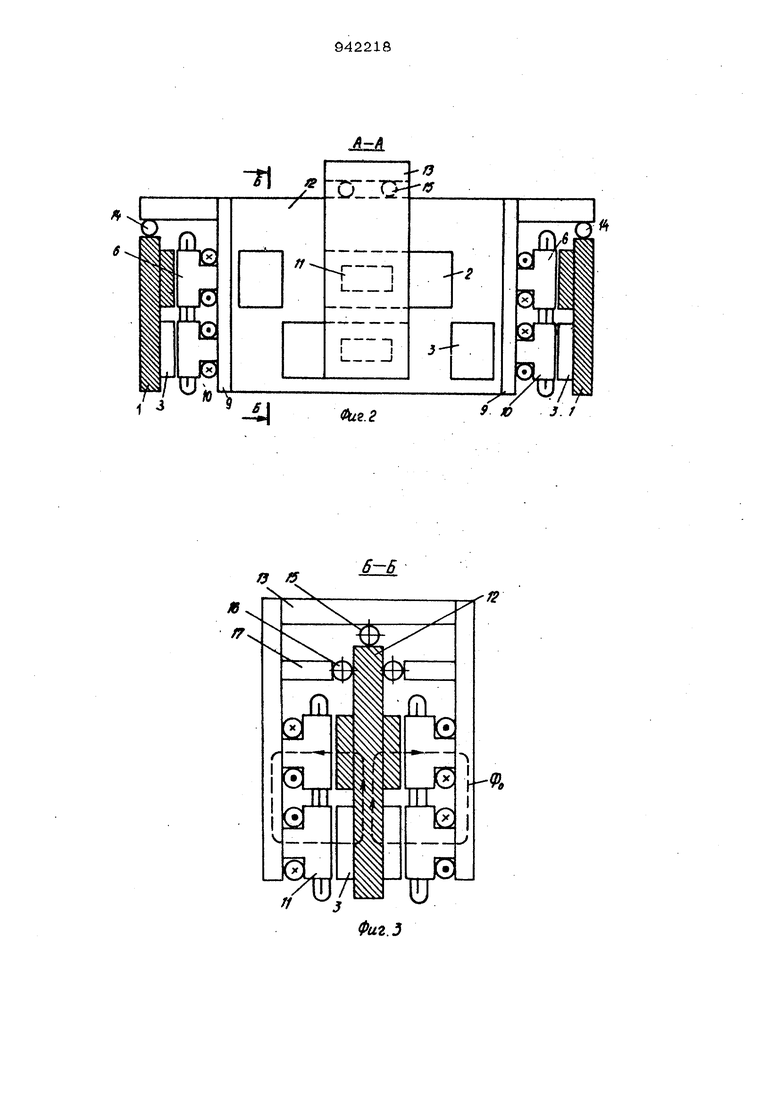

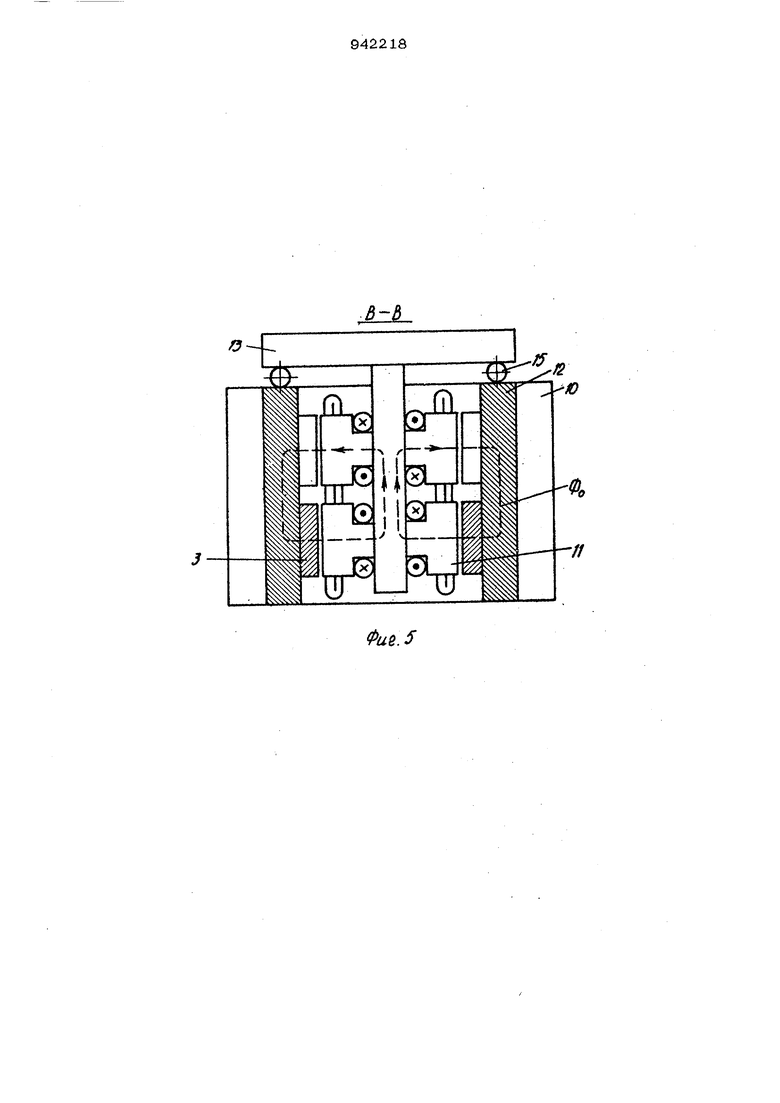

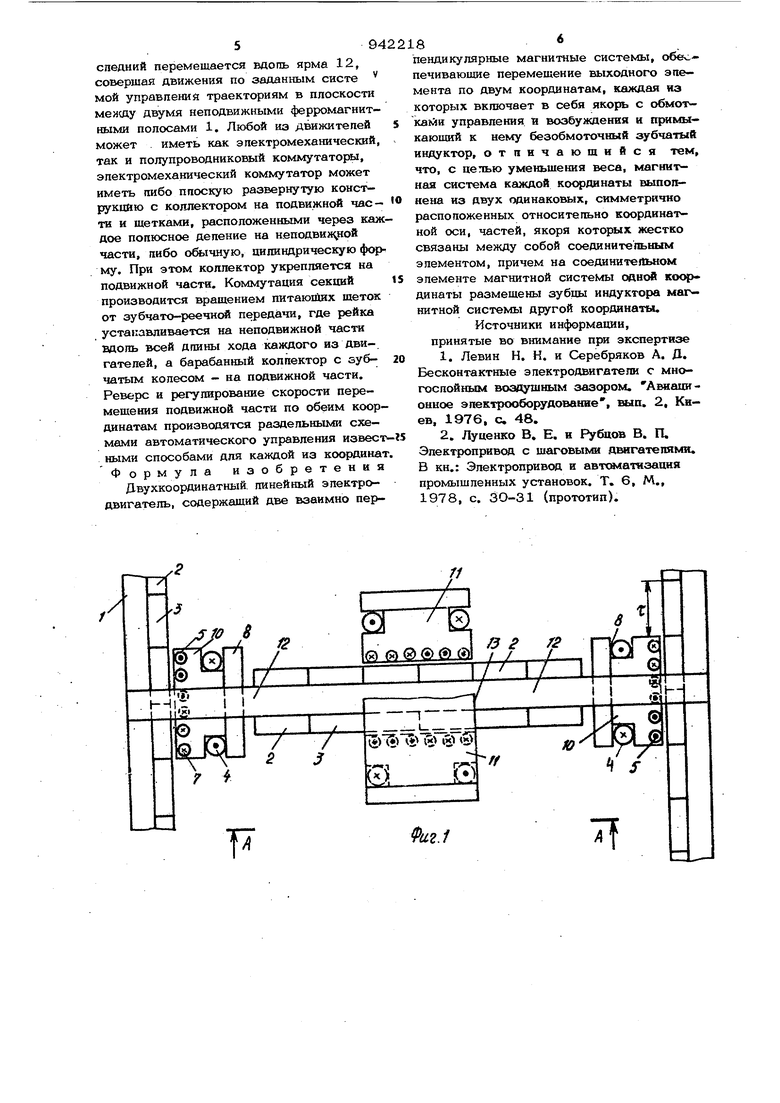
Изобретение относится к электромаши ностроению и может быть использовано в координатных столах станков, машин, механизмов для отработки координат при широком диапазоне регулирования скорос ти, что необходимо для ппоскоконтурной обработки деталей, например, во фрезерных, копировальных и других станках, ма1иинах термической резки, координатографах, графопостроителях и т. п. Известен линейный электродвигатель, состоящий КЗ безобмоточного зубчатого индуктора и якоря с обмотками управления возбуждения 1 . Указанный двигатель обеспечивает пе ремешение выходного элемента только по одной координате. Для получения двух координатного перемещения выходного элемента необходима установка двух двигателей. Наиболее близким к предлагаемому по технической сущности является двухкоординатный линейный электродвигатель, содержащий две взаимно перпендикулярные магнитные системы, обеспечивающие перемещение выходного элемента по двум координатам, каждая из которых включает в себя якорь с обмотками управления и возбуждения и примыкающий к нему безобмоточный зубчатый индуктор 2Т Недостатком указанного двигателя является большой вес, обусловленный необходимостью выполнения индуктора, площадь которого равна площади координатной поверхности, охватываемой выходным элементом двигателя. Цепь изобретения - уменьщения веса двигателя. Указанная цель достигается тем, что магнитная системы каждой координаты выполнена из двух одинаковых, симметрично расположенных относительно координатной оси, частей, якоря которых жестко связаны между собой соединительным элементом, причем на соединительном элементе магнитной системы одной координаты размещены г цы индуктора магнитной системы другой координаты. 394 Такое конструктивное выполнение двух координатного двигателя поавош ет сокра титъ- площадь индуктора и -меньишть тем самым вес двигателя. На фиг, 1 приведен вид cBepjjy первого варианта двухкоординатного двигате ЛЯ5 на фиг, 2 - разрез А-А на г, 11 (поперечный разрез одной кооррднаты двигателя); на г, 3 - разрез Б-Б на фиг, 2 (поперечный разрез другой координаты двигателя); на фиг. 4 - показан второй вариант двигателя; на фиг. 5 разрез Б-В на фиг, 4 (поперечный разрез двигателя по другой координате); на фиг, 6 - третий вариант двигателя; на фиг. 7 - разрез Г-Г на фиг. 6 (поперечный разрез по первой координате). Электрический двигатель (фиг. 1) состоит из неподвижной .части, представляющей собой ферромагнитную полосу 1 с двумя рядами формирующих магнитное по ле одинаковых выступов (зубцов) 2 и 3, расположенных в шахматном порядке на каждом полюсном делении U и подвижной части (якоря) с обмотками возбуждения 4 и управления 5. Подвижная часть представляет собой два магии топровода 6 (фиг. 2) с пазами 7 для обмотки управления и пазами 8 для обмотки возбуждения, Магнитопроводы Дйиной 2Т каждый, укреплены на общей ферромагнитной плите 9 друг над другом без сдвига с зазором между ними по высоте обеспечивающим допустимые значения магнитного потока рассеяния. Один из вариантов двигателя (фиг.1 и 2) состоит из двух неподвижных ферромагнитных полос 1 с выступами 2 и 3 и двух движителей 1О и 11. Базовый движитель 1О состоит из двух якорей, расположенных друг от друга на расстоянии: необходимом для перемещения рабочего органа по одной из координат (например, )( ) и соединенных ярмом 12, Ярмо 12 по конструкции аналогично неподвижным ферромагнитным полосам 1, .fto имеет выступы 2 и 3 с двух сторон. Ферромагнитные выступы 2 и 3 с обеих сторон располагаются друг против друга без сдвигов, Ярмо 12 первого движителя 10 $тляется неподвижной частью движителя, осуществляющего отработку второй координаты. Подвижная часть второго движителя 11 состоит, в свою очередь, также из двух якорей, расположенных по обе стороны ярма 12 и конструктивно объеди f ненных соединительной плавкой 13. План 84 ка 13 одновременно может нести рабочий орган механизма или сама является несущей плитой координатного стола. Сечения А-А (фиг. 2) и Б-Б (фиг. 3) показывают, что неподвижные ферромагнитные попоен 1 одновременно являются направляющими для перемещения на шариковых (ипи других) опорах 14 всей подвижной части предлагаемого двигателя в одном координатом направлении. Движите ль 11 (фиг, 3) перемещается на своих шариковых (или других) опорах 15 вдоль ярма 12 в перпендикулярном координатном направлении. При необходимости оба движителя 10 и 11 могут быть снабжены распорными катящимися опорами 16, установленными на крепящих конструкциях 17, как это показано для одного участка движителя 11 (фиг, 3). На фиг. 4 и 5 показан второй вариант двухкоординатного двигателя, содер- . жащий четыре движителя 10, объединенных двумя металлическими полосами 18 в жесткую прямоугольную раму (фиг, 4). Движитель, отрабатывающий вторую координату, располагается между ярмами 12 с шахматными выступами 2 и 3, обращенными внутрь образовавшейся жесткой рамы. Поперечный разрез движитепя.осушествляюшего движение по второй координате, представлен на фиг, 5. Третий вариант двигателя обеспечивающий загрузку опор от веса подвижной части, изображен на фиг, 6 и 7, Здесь движитель 1О всей подвижной части поворачивается на 90. Неподвижные полосы с выступами также соответственно поворачиваются на 90°, Их крепление к бснованию осуществляется с помощью вертикальных корпусных деталей 19, Как следует из 4иг, 7, усилия одностороннего тяжения в этом случае не компенси- , руются, как это осуществляется у двигателей на фиг, 1 и 4| а Действуют в направлении, противоположном силе тяжес v. ти, компенсируя суммарный вес всей подвижной части двигателя, что упучЬает динамические свойства и уменьшает его весовые показатели. Двигатель работает следующим обра- зом. При подаче питания на обмотки якоря и возбуждения движителя 1О происходит его перемещение вдоль неподвижных полос 1. При этом в этом же направлеНИИ перемещается на ярме 12 неподвижный движитель 11. При подаче напряжения на обмотки возбуждения и якоря движителя 11 по594следний перемещается вдопь ярма 12, совершая движения по заданным систе мой управлений траекториям в плоскости меисду двумя неподвижными ферромагнитными полосами 1. Любой иэ движитепей может иметь как электромеханический, так и полупроводниковый коммутаторы, электромеханический коммутатор может иметь либо плоскую развернутую конструкцйю с коллектором на подвижной часТВ и щетками, расположенными через каждое полюсное деление на неподвиж ной части, либо обычкую, цилиндрическую фор. му. При этом коллектор укрепляется на подвижной части. Коммутация секций производится вращением питаю1йих шеток от зубчато-реечн й передачи, где рейка устанавливается на неподвижной части вдюпь всей дпины хода каждого из Двигателей, а барабанный коллектор с зубчатым колесом - на подвижной части. Реверс и регулирование скорости перемещения подвижной части по обеим координатам производятся раздельными схемами автоматического управления известными способами для каждой из координат. Формулаизобретения Двухкоординатный. линейный электродвигатель, содержащий две взаимно пер186пендикупярные магнитные системы, обеопечиваюшие перемещение выходного эпемента по двум координатам, каждая из которых вкшочает в себя якорь с обмоткайи управления и возбуждения и примыкающий к нему безобмоточный зубчатый индуктор, отпичающийся -тем, что, с целью уменьшения веса, магнитная система каждой кос динаты выпо ьнена из двух одинаковых, симметрично расположенных относительно координат ной оси, частей, якоря которых жестко связаны между собой соединительным элементом, причем на соединитепьном элементе магнитной системы одной коею. динаты размещены зубцы индуктора магнитной системы другой координаты. Источники информации, принятые во внимание при экспертизе 1. Левин Н. И. и Серебряков А. Д. Бесконтактные электродвигатели с многослойным воздушным зазором. Авиационное электрооборудование , вып. 2. Киев, 1976, с, 48 2. Луценко В, Е. и Рубцов В. П. Электропривод с шаговыми двигателями. В кн.: Электропривод и автсадатизация промышленных установок. Т. 6, М., 1978, с. 30-31 (прототип).
6-6
Фиг.З
п.
.«si
О.
-
12
JS
F
f3;i
I I
i (
li
4
CU
5:
Ы ® 8
I I I I
©.,
е
CS)
Т
.xii
(И5)
т
G
в-в
//
Фи. S
