Изобретение относится к электротехнике, в частности к электрическим машинам, и может быть использовано в качестве электрического привода малогабаритных автоматических машин термической резки, координатных столов металлообрабатывающего оборудования, в промышленных роботах и манипуляторах, а также периферийных устройствах электронных вычислительных машин-графопостроителях и коор- . динатографах.
Известен двухкоординатный линейный электрический двигатель, содержащий общий зубчатый индуктор, выполненный в виде плиты, и жестко связанные между собой якори, обеспечивающие перемещение рабочего органа по двум координатам 1.
Недостатком указанного привода является наличие общей плиты и сложность выполнения опор, обеспечивающих перемещение якорей с рабочим органом по двум координатам.
Наиболее близким к изобретению по технической сущности является двухкоординатный линейный электрический привод, состоящий из двух магнитонесвязанных линейных двигатялей, неподвижные зубчатые индукторы которых расположены перпендикулярно друг другу, а подвижные якори связаны с рабочим органом кинематическим узлом 2.
Недостатке этого привода является наличие кинематического узла, объединяющего якори обеих координат, что существенно усложняет механическую часть двигателя.
Цель изобретения - упрощение конструкции привода.
Поставленная цель достигается тем, что в двухкоординатном линейном электрическом приводе с двумя магнитонесвязанньми линейными двигателями кинематический узел выполнен в виде двух штанг, жестко соединенных между собой концами под прямым углом, а каждый якорь снабжен опорамиj допускающими перемещение расположенной между ними штанги в плоскости, перпендикулярной плоскости движения якоря.
Кроме того, в привод могут быть введены два дополнительных магнитонесвязанных линейных двигателя, аналогичных основным, зубчатые индукторы которых образуют совместно с основными замкнутую прямоугольную раму, а штанги кинематического узла, жестко связанные между собой концами под прямыми углами, образуют крестовину, расположенную в плоскости, параллельной плоскости индуктора.
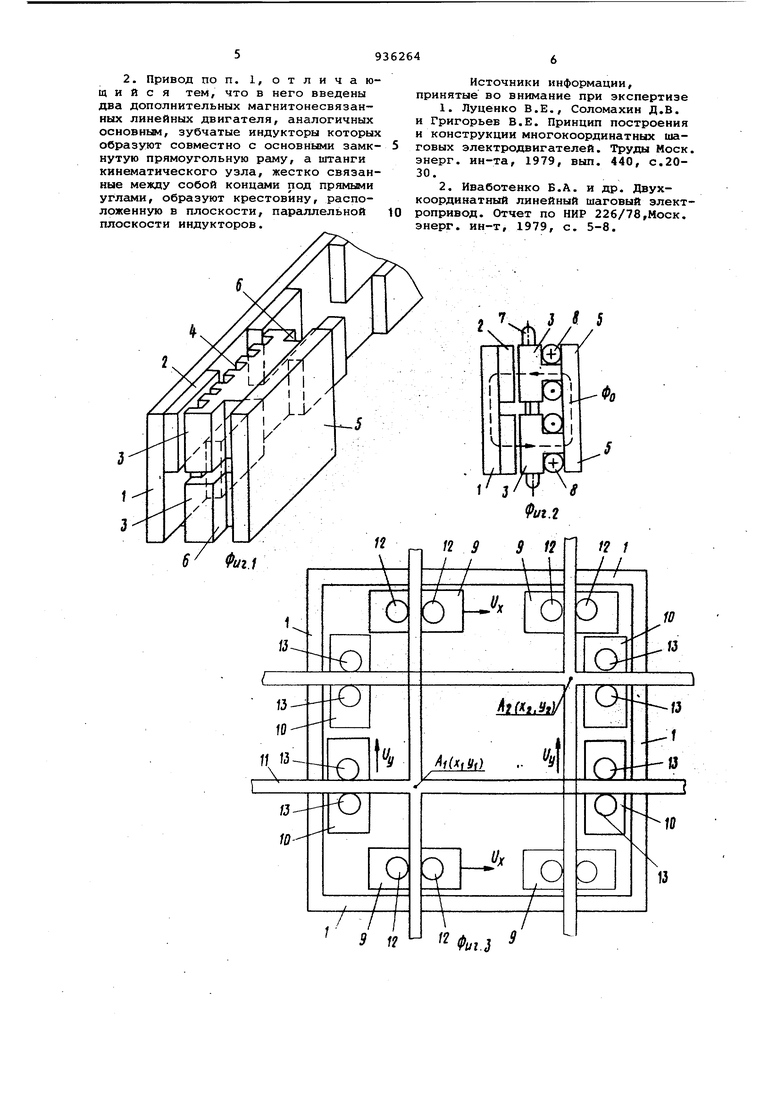
На фиг.1 изображен магнитопровод линейного двигателя, общий вид; на фиг.2 - линейный двигатель, поперечный разрез; на фиг.3 - двухкоординатный привод с четырьмя линейными двигателями, образующими прямоугольную раму, вид в плане; на фиг.4 подвижная крестовина кинематического узла; на фиг.5 - двухкоординатный привод с двумя линейными двигателями, вид в плане; на фиг.6 - подвижная часть двухкоординатного привода с двумя линейными двигателями.
Линейный двигатель, образующий каждую координату двухкоординатного привода, содержит ферромагнитную полосу 1 переменного сечения, несущую полюсные выступы 2, формирующие основное поле машины (фиг. 1 и 2). Якорь линейного двигателя состоит из двух Т-образных магнитопроводов 3 с пазами 4. Между магнитопроводами 3 и плитой 5, на которой они укреплены, образован паз 6 для. размещения обмотки возбуждения.
Якорная обмотка 7, уложенная в пазы 4 обоих магнитопроводов 3, коммутируется полупроводниковым коммутатором или электрюмеханичёским коллектором (не показаны). Обмотки возбуждения 8, уложенные в пазы 6,создают основной магнитный поток машины Фр, замыкающийся через магнитопроводы 3 полюсообразующие выступы 2 и пластины 1 и 5.
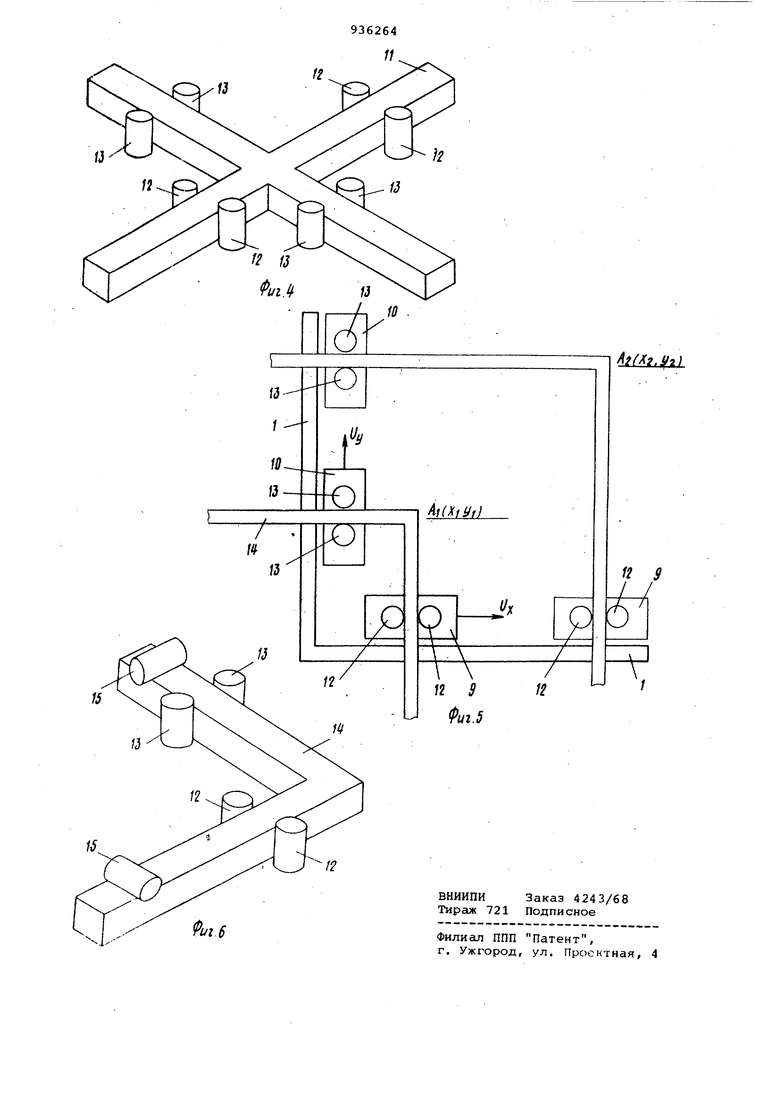
Линейный двигатель каждой координаты двухкоординатного привода,представленного на фиг.З, состоит из двух модулей, упрощенно изображенных прямоугольником. Модули, реализующие движение вдоль координаты X, обозначены цифрой 9, а вдоль координаты Y цифрой 10. Аналогичные обозначения приняты и для фиг.5. Подвижнаякрестовина 11 (фиг.З и 4) механически связана с модулями 9 и 10 направляющими, выполненными, например, в виде опор качения 12 и 13.
Уменьшение площади двухкоординатного привода достигается в варианте, приведенном на фиг.5. Здесь неподвижный элемент выполнен в виде угольника из двух ферромагнитных полос 1, располагающихся под прямым углом друг к другу.
На опорах качения 12 и 13 подвижных модулей 9 и 10 перемещается подвижный элемент 14, выполненный также в виде угольника, вершина которого располагается в координатной плоскости, а стороны скользят в опорах качения 12 и 13. Угольник 14-образован двумя штангами, жестко связанными концами под прямым углом. Для устранения перекосов элемента 14 в вертикальной плоскости здесь необходимо использовать опоры качения 15, предотвращающие поворот подвижного элемента.
Двухкоординатный привод работает следующим образом.
При подаче питания на обмотки 0 якоря 7 и возбуждения 8 модулей 9 электромагнитное усилие, создаваемое при взаимодействии зубцов якоря с полюсными выступами 2, начинает перемещать модули 9, например вправо, 5 со скоростью Vx (фиг. 3 и 5). Модули
9,объединенные механически вертикальной частью крестовины 11, начинают двигаться в этом направлении/ так как горизонтальная часть
Q крестовины 11 свободно перемещается в своих опорах 13, укрепленных на модулях 10. При начавшемся движении модулей 9 электромеханический или полупроводниковый коммутаторы переключает секции якорных обмоток 7 так, чтобы направления электромагнитного усилия и скорости V)( не изменялись. Аналогично работает предлагаемый привод при подаче питания на обмотки 7 якоря и возбуждения 8 модулей
10,так как очевидно вертикальная часть крестовины 11 также свободно
перемещается в своих опорах 12, укрепленных на модулях 9. Подача питания на пары модулей 9 и 10 одновременно приводит к перемещению, наприт мер, центра крестовины 11 (А) из точки А. с координатами х , в точку Aij, с координатами Xi,(ino любой наперед заданной траектории,
0 определяемой соотношением скоростей Vy и задаваемым управляющим органом. Реверс и регулирование скорости производятся методами, обычными для электродвигателей постоянного
5 тока.
Формула изобретения
1. Двухкоординатный линейный электрический привод, состоящий из двух магнитонесвязанных линейных двигателей, неподвижные зубчатые индукторы которых расположены перпендикулярно друг другу, а подвижные якори связаны с рабочим органом кинематическим узлом, отличающийся тем, что, с целью упрощения, кинематический узел выполнен в виде двух штанг, жестко соединенных между собой концами под прямым углом, а каждый якорь снабжен упорами, допускающими перемещение расположенной между ними штанги в плоскости, перпендикулярной плоскости
движения якоря. 2. Привод по п. 1, отличающийся тем, что в него введены два дополнительных магнитонесвязанных линейных двигателя, аналогичных основным, зубчатые индукторы которых образуют совместно с основными замкнутую прямоугольную раму, а штанги кинематического узла, жестко связанные между собой концами под прямыми углами, образуют крестовину, расположенную в плоскости, параллельной плоскости индукторов. 9 Источники информации, принятые во внимание при экспертизе 1.Луценко В.Е., Соломахин Д.В. и Григорьев В.Е. Принцип построения и конструкции многокоординатных шаговых электродвигателей. Труды Моск. энерг. ин-та, 1979, вып. 440, с.2030. 2.Иваботенко Б.А. и др. Двухкоординатный линейный шаговый электропривод. Отчет по НИР 226/78,Моск. энерг. ин-т, 1979, с. 5-8. J 8 5 Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный линейный электрический привод | 1980 |
|
SU983927A2 |
| Двухкоординатный электрический двигатель | 1982 |
|
SU1083302A1 |
| Двухкоординатный линейный электродвигатель | 1979 |
|
SU942218A1 |
| Двухкоординатный линейный шаговый двигатель | 1976 |
|
SU604094A1 |
| Многокоординатный шаговый электродвигатель | 1982 |
|
SU1080240A1 |
| Двухкоординатный электродвигатель | 1988 |
|
SU1624620A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный электродвигатель | 1985 |
|
SU1359863A1 |
| КООРДИНАТНЫЙ СТОЛ, ПОРТАЛ КООРДИНАТНОГО СТОЛА И СПОСОБ ИЗГОТОВЛЕНИЯ ИНДУКТОРА МНОГОФАЗНОГО ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1998 |
|
RU2133184C1 |