(5) ДВУХКООРДИНАТНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Двухкоординатный линейный электродвигатель | 1979 |
|
SU942218A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный шаговый электродвигатель | 1987 |
|
SU1422319A1 |
| Плоский двухкоординатный двигатель | 1981 |
|
SU1096739A1 |
| Двухкоординатный электродвигатель постоянного тока | 1980 |
|
SU1037384A1 |
| Двухкоординатный электрическийдВигАТЕль | 1979 |
|
SU849389A1 |
| Двухкоординатный электрический двигатель | 1982 |
|
SU1083302A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
Нзо{5ретение относится к электротехнике, а именно к многокоординатным линейным электрическим двигателям и может быть использовано в ко ординатографах, координатных столах металлообрабатывающих станков, графо построителях и промышленных работах, малогабаритных машинах термической резки и т.д. Известен двухкоординатный шаговый электродвигатель, содержащий жестко связанные между собою якори, каждый из которых снабжен взаимно перпендикулярными системами обмоток и неподвижную ферромагнитную плиту Cl . Наиболее близким по технической сущности к предлагаемому является двухкоордитный электрический двигатель , каждая координата которого включает в себя подвижный якорь и не подвижную ферромагнитную полосу С2 3Однако в известных двухкоординатных двигателях якори обеих координат жестко связаны между собой, что при возбуждении обмоток якоря одной координаты вызывает движение якорей обеих координат. Одновременное перемещение якорей обеих координат ограничивает функциональные возможности и быстродействие двигателя. Целью изобретения является расширение функциональных возможностей и повышение быстродействия двухкоординатного двигателя. Поставленная цель достигается тем, что в двухкоординатный электрический двигатель, каждая координата которого включает в себя подвижный якорь и неподвижную ферромагнитную полосу, введены не менее двух стержней, свя3анных шарнирно одними концами с якорями , а вторыми концами шарнирно соединенных между собой. Такое выполнение двухкоординатного двигателя позволяет передавать
движение рабочему органу независимо от каждой координаты.
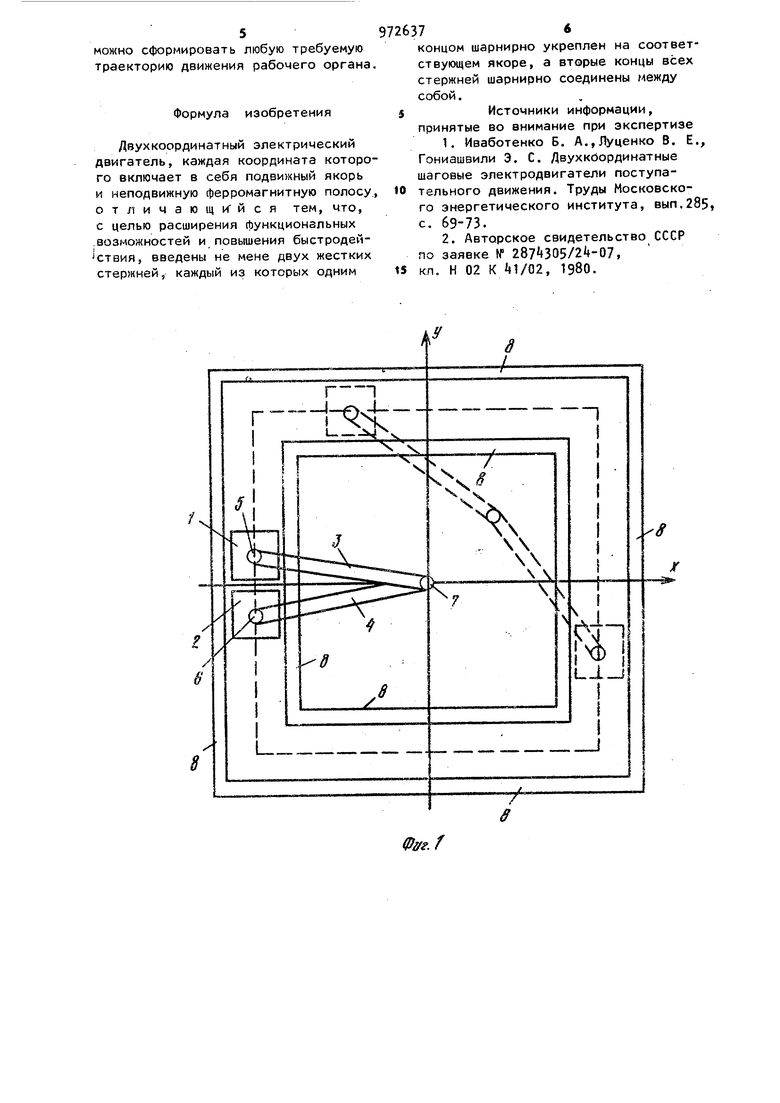
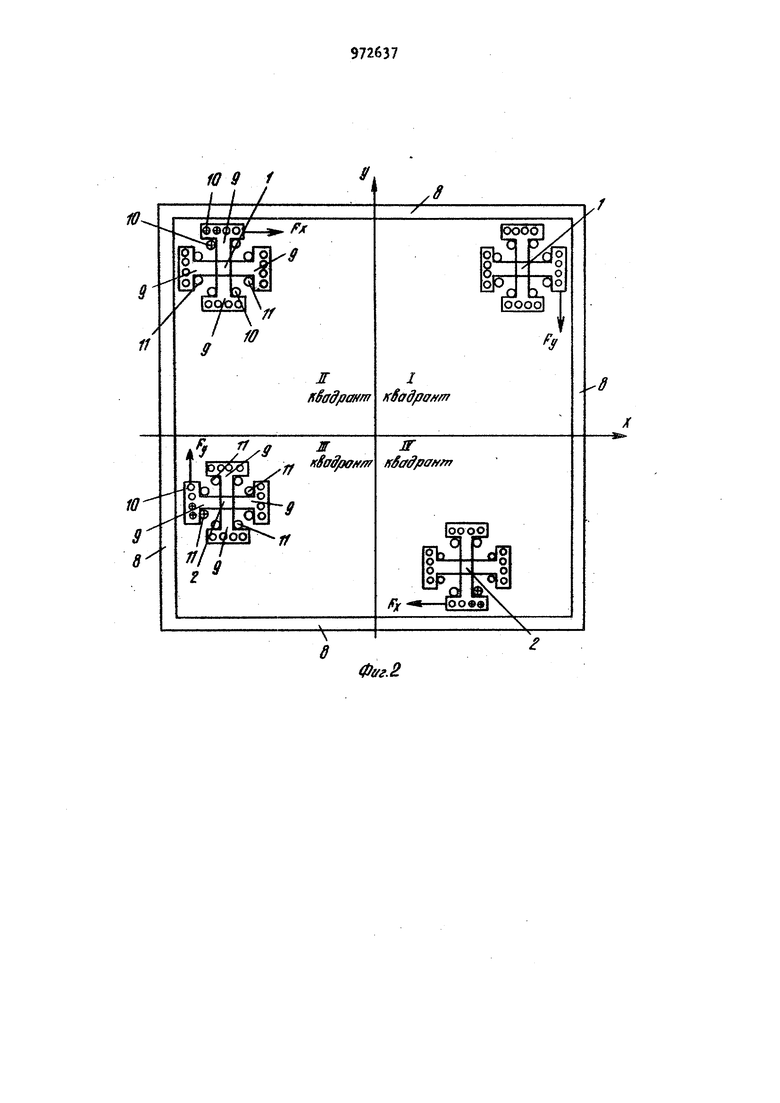
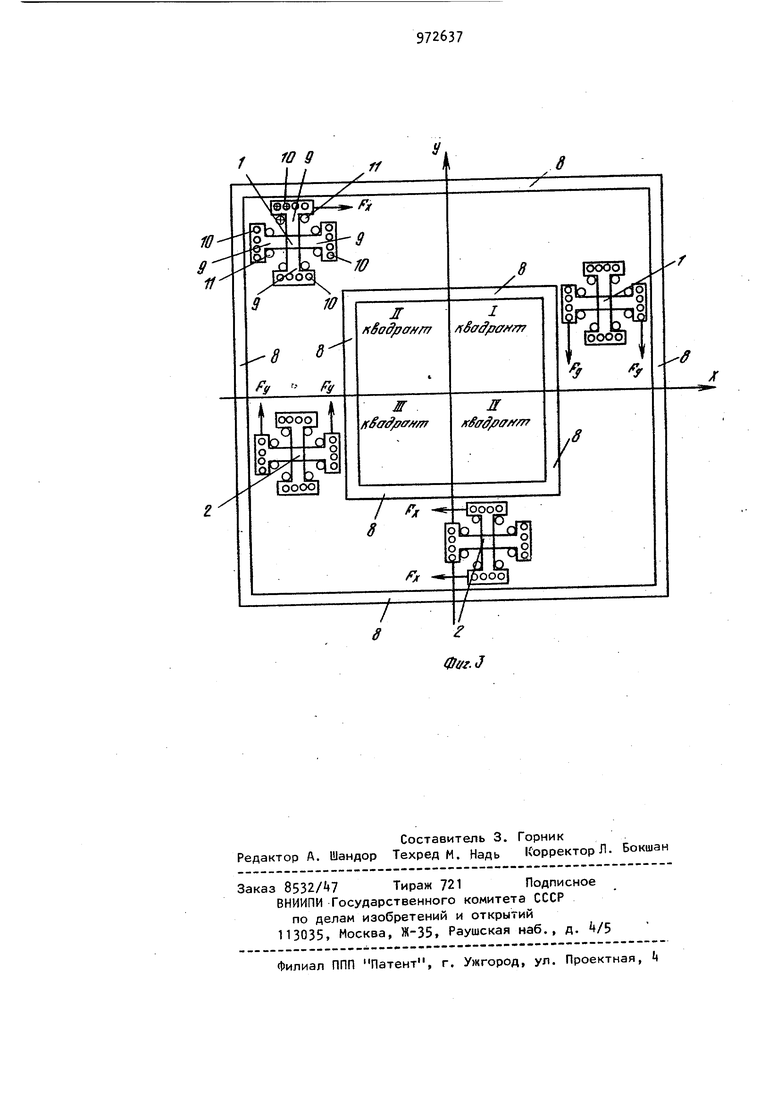
На фиг.1 схематично показана общая конструкция двухкоординатного двигателя; на фиг. 2 один из вариантов конструкции подвижных якорей и неподвижной части двигателя, выполненной в виде одинарной прямоугольной рамы; на фиг.3 второй вариант выполнения неподвижной части двигателя в виде двойной прямоугольной рамы.
Двухкоординатный двигатель фиг.1) состоит не менее, чем из двух модулей 1, . (подвижных якорей ) . В обще случае их может быть любое четное число. Модули 1 и 2 связаны с стержнями 3 и k посредством шарниров 5 и б, допускающих поворот модуля вокруг оси, перпендикулярной плоскости движения. Вторые концы стержней 3, также связаны между собой шарниром 7, допускающим поворот их относитель но друг друга вокруг оси, перпендикулярной плоскости движения. С шарниром 7 связан рабочий орган, приводимый в движение (не показан ). Якори 1 и 2 взаимодействуют с неподвижными зубчатыми ферромагнитными полосами 8, образующими одну (.фиг.2 ) или две концентрично расположенные прямоугольные рамы (фиг.З Каждый модуль-якорь может быть выполнен, например, в виде крестообразного магнитопровода с четырьмя полюсами 9 в пазах которых размещены обмотки управления 10 (фиг.2 и 3). Обмотки возбуждения 11 охватывают каждый полюс 9- Ферромагнитные полосы 8 снабжены зубцами, рас положенными в шахматном порядке с полюсным делением t и взаимодействующими с обмотками управления 10. Длина зубцов в направлении движения якоря составляет , где коэффициент расчетной полюсной дуги. По вертикали зубцы разделены немагнитным зазором, что обеспечивает необходимое формирование основного магнитного потока и уменьшение потоков рассеяния. Двигатель работает следующим образом. Предположим, что движение модуля 1 (фиг.2) начинается в I квадранте вниз. При этом возбуждаются обмотки управления 10 и возбуждения 11 полюса 9. примыкающего к правой ферро
магнитной полосе 8. При азаимодействии магнитных потоков., создаваемых обмотками 10 и 11, с зубцами ферромагнитной полосы 8 создается сила
F , направленная вниз (как показано стрелкой на фиг, 2).
Под ее действием подвижный модуль 1 перемещается в IV квадрант. Когда он войдет в угол неподвижной части
расположенный в IV квадранте, схена управления отключает обмотки возбуждения 11 и управления 10 правого полюса 9 и подключает обмотки нижнего полгаса, который входит во взаимодействие с зубцами нижней ферромагнитНОЙ полосы 8. При этом создается сила FX, направленная влево и перемещающая модуль 1 из I 1-го в litквадрант вдоль нижней неподвижной полосы 8. Если при входе подвижной части в угол III квадранта осуществить переключения в обмотках возбуждения и якоря, подобные предыдущим, то подвижная часть начнет обход неподвижной рамы вдоль ее левой стороны и т.д. Таким образом, каждый из подвижных модулей двигателя может обойти (эдоль периметра неподвижной координатной рамы, изменяя направление своего движения в каждом из углов на 90. Для увеличения усилия, развиваемого каждым модулем, двигатель может быть снабжен дополнительными ферромагнитными полосами 8 с зубцами, аналогичными основным, которые образуют внутреннюю прямоугольную раму, концентрично расположенную относительно внешней рамы (фиг.З). Связь модулей 1 и 2 стержнями 3. 4, шарнирно укрепленными на модулях и между собой, обеспечивает автономность движения каждого модуля двигателя при отработке заданного перемещения рабочего органа. Например, если модуль 2 неподвижен (фиг.1), а модуль 1 движется вверх, то центр шарнира 7 опишет дугу окружности. При движении модулей 1 и 2 в противоположные стороны с одинаковыми скростями центр шарнира 7 (связанный с рабочим органом ) перемещается по оси X. Регулируя скорости движения модулей и обеспечивая с помощью системы управления перевод подвижных модулей 1 и 2 в разные квадранты {эабо-. . чей плоскости, ограниченной внешней рамой (например, в положение, показанное на фиг.1 штриховыми линиями;,
можно сформировать любую требуемую траекторию движения рабочего органа.
Формула изобретения
Двухкоординатный электрический двигатель, каждая координата которого включает в себя подвижный якорь и неподвижную ферромагнитную полосу., отличающийся тем, что, с целью расширения функциональных .возможностей и повышения быстродей ствия, введены не мене двух жестких стержней, каждый из которых одним
726376
концом шарнирно укреплен на соответствующем якоре, а вторые концы всех стержней шарнирно соединены между собой. S Источники информации,
принятые во внимание при экспертизе
1,Иваботенко Б. А.,Луценко В. Е., Гониашвили Э. С. ДвухкЬординатные шаговые электродвигатели поступа0 тельного движения. Труды Московского энергетического института, вып.285, с. 69-73.
t$ кл. Н 02 К , 1980.
0&g.f
W
/
11
8
/
/
IX
Ж KSadfltmnr
1
-8 xSadpff/ffTf
10
8
IT
д
ОФф
/
ф1/г.2
