(54) ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ВИНТОМ РЕГУЛИРУЕМОГО ШАГА
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| Система управления винтом регулируемого шага | 1991 |
|
SU1781131A1 |
| Устройство для программного управления самовозвратным исполнительным механизмом | 1980 |
|
SU957175A1 |
| Устройство для визуального отображения сигнальной информации | 1978 |
|
SU742993A1 |
| Устройство для управления гребным винтом регулируемого шага и двухступенчатым редуктором | 1980 |
|
SU906791A1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1969 |
|
SU254355A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ РЕГУЛИРОВАНИЯ ЕГО ВЫХОДНОГО СИГНАЛА | 2000 |
|
RU2242051C2 |
| Устройство для управления подводным противовыбросовым оборудованием | 1980 |
|
SU962597A1 |
| Система погрузки-выгрузки жидких грузов на судне | 1981 |
|
SU1064583A1 |
| Приемно-дешифрующее устройство для системы радиоуправления и связи преимущественно для очистных забоев угольных шахт | 1980 |
|
SU1010268A1 |
Изобретение относится к судостроению, в частности к ёпектрогидравлическим сиотемам управления винтом регулируемого шага.
Известна электрогидравлическая система управления винтом регулируемого шага (ВРШ), содержащая командный аппарат, ,блок управления, подключенный к электрогидравлическому приводу, механически связанному с лопастями винта регулируемого шага и электрически связанному с входом блока управления l.
Однако кзвестная система характеризуется недостаточной надежностью управления, выражающейся в возможности подачи оператором ХЬшибка оператора) последующей команды на исполнение до установки исполнительного органа (лопаотей ВРШ) в, заданное поло кение по предыдущей команде, что приводит к nepe- -t грузкам механических узлов и увеличению расхода анергии на управление электрогидравлическим приводом.
Цель изобретения - повышение надея носги управления и снижение расхода энергии на управление электрогидравл№ческим приводом.
Цель достигается тем, что электро- гидравлическая сисапема управления винтом регулируемого шага снабжена блоком дискретных сигналов, первый выход кото10рого подключен к второму входу блока управления второй выход - к входу командного аппарата, а вход - к выходу командного аппарата, и блоком формирования командь запрета, вход которого под15ключен -к электрогидравпическому приводу, а выход - к второму входу блока дискретных сигналов, npH4«vi блок дискретных сигналов включает параллельно подключенные цепочки, состоящие каждая
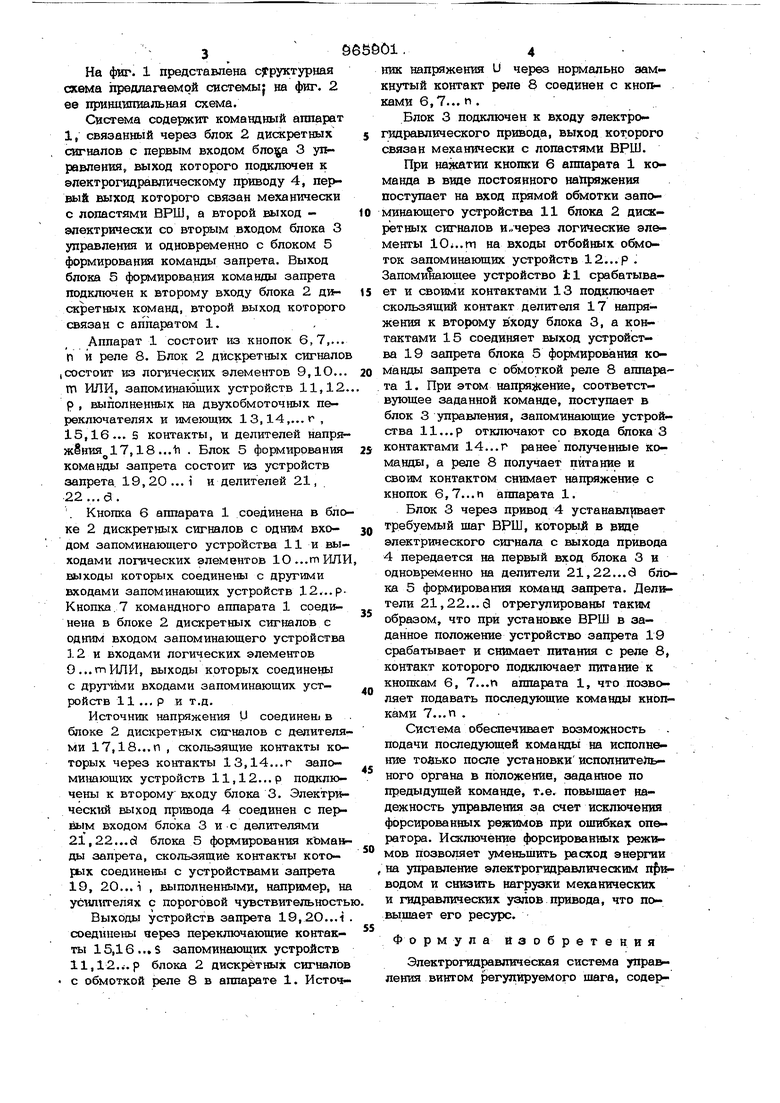
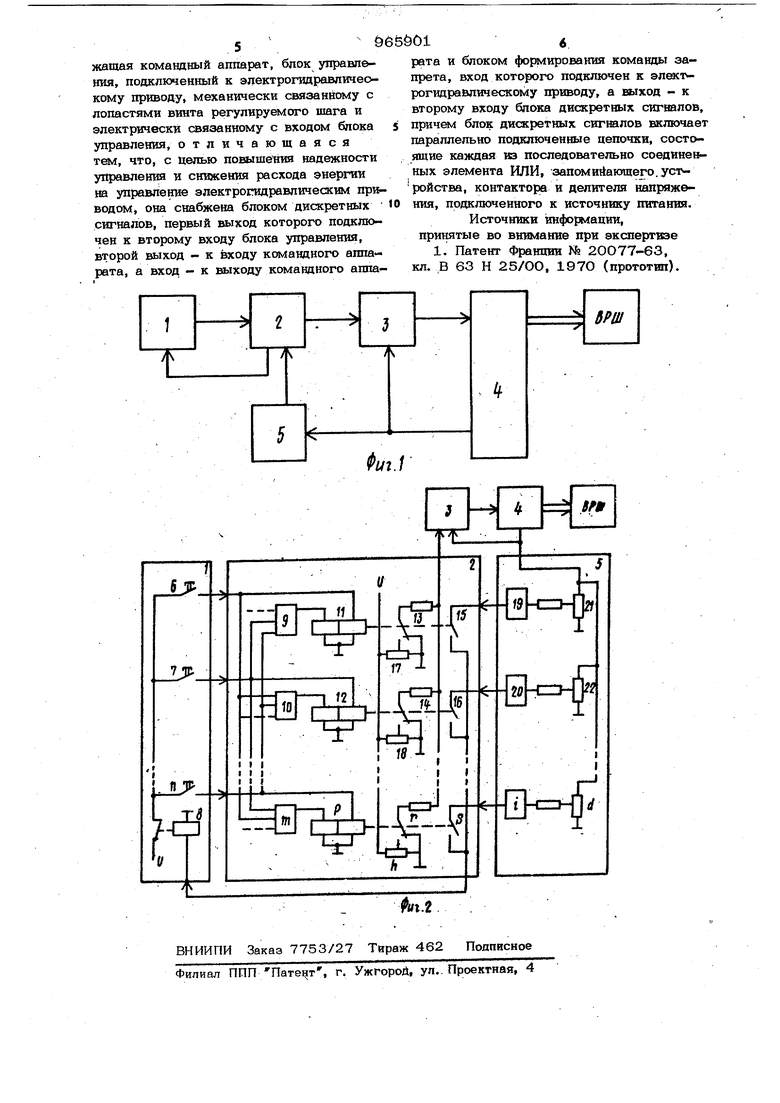
20 VB последовательно соединенных элемента ИЛИ, аапоминающегю устройства, контактора и делителя напряжения, подклкм ченвого к источнику питания. S На фиг. 1 представлена с5Груктурная схема предлагаемой системы} на фиг. 2 ее приникоиальная схема. Система содержит командный аппарат 1, связанный через блок 2 дискретных сигналов с первым входом 3 управления, выход которого подключен к электрогидравлическому приводу 4, первый выход которого связан механически с лопастями ВРШ, а второй выход электрически со вторым входом блока 3 управления и одновременно с блоком 5 формирования команды запрета. Выход блока 5 формирования команды запрета подключен к второму входу блока 2 дискретных команд, второй выход которого связан с аппаратом 1.Аппарат 1 состоит из кнопок 6,7,... П и реле 8. Блок 2 дискретных сигналов (СОСТОИТ из логических элементов 9,10... ГП ИЛИ, запоминающих устройств 11,12. р , выполненных на двухобмоточных переключателях и имеющих 13,14,...г , 15,16... S контакты, и делителей Hanps ж§ния 17,18 ...Vi . Блок 5 формирования команды запрета состоит из устройств запрета. 19,20...i и делителей 21, 22 ...а. . Кнопка 6 аппарата 1 соединена в бло ке 2 дискретных сигналов с одним входом запоминающего устройства 11 и выходами логических элементов 10...тИЛИ выходы которых соединены с другими входами запоминающих устройств 12...рКнопка, командного аппарата 1 соединена в блоке 2 дискретных сигналов с одшдал входом запоминающего устройства 12 и входами логических элементов О ... m ИЛИ, выходы которых соединены с другими входами запоминающих устройств 11 ... р и т.д. Источник напряжения У соединеш в блоке 2 дискретных сигналов с д«лителяМи 17,18...п , скользящие контакты которых через контакты 13,14...г запоминающих устройств 11,12... р подключены к второму входу блока 3. Электрический выход привода 4 соединен с перйым входом блока 3 и с делителями 21,22...d блока 5 формирования кьмавды запрета, скользящие контакты которых соединены с устройствами запрета 19, 20...i , выполненными, например, на ус ш ггелях с пороговой чувствительность Выходы устройств запрета 19,2O...i соединены аерез переключающие контакты 15,16..,S запоминающих устройств 11,12... р блока 2 дискретных сигналов . с обмоткой реле 8 в аппарате 1. Источ01,4 ник напряжения U через нормально замкнутый контакт реле 8 соединен с кнопками 6,7... п . Блок 3 подключен к входу электрогидравлического привода, выход которого связан механически с лопастями ВРШ. При нажатии кнопки 6 аппарата 1 команда в виде постоянного напряжения поступает на вход прямой обмотки запоминающего устройства 11 блока 2 дискpieTHbix сигналов и..через логические элементы 10i..tTi на входы отбойных обмоток запоминающих устройств 12... р . Запоминающее устройство 11 срабатывает и своими контактами 13 подключает скользящий контакт делителя 17 напряжения к второму входу блока 3, а контактами 15 соединяет выход устройства 19 запрета блока 5 формиров1ания команды запрета с обмоткой реле 8 аппарата 1. При этом напрязкение, соответствующее заданной команде, поступает в блок 3 управления, запоминающие устройства 11...р отключают со входа блока 3 контактами 14...Г ранее полученные команды, а реле 8 получает питание и своим контактом снимает напряжение с кнопок 6,7...п аппарата 1. Блок 3 через привод 4 устанавливает требуемый щаг ВРШ, который в виде электрического сигнала с выхода привода 4 передается на первый вход блока 3 и одновременно на делители 21,22...d блока 5 формирования команд запрета. Дел№тели 21,22...а отрегулированы таким образом, что при установке ВРШ в заданное положение устройство запрета 19 срабатывает и снимает питания с реле 8, контакт которого подключает питание к кнопкам 6, 7...П аппарата 1, что позволяет подавать последующие команды кнопками 7...П . Система обеспечивает возможность подачи последующей команды на исполнение тойько после установки исполнительного органа в положение, заданное по предыдущей команде, т.е. повышает надежность управления за счет исключения форсированных режимов при ошибках оператора. Исключение форсированных режимов Позволяет уменьшить расход энергии на управление электрогидравличеосиМ п)Иводом и снизить нагрузки механических и гидравлических узлов привода, что повышает его ресурс. Формула изобретения Электрогидравлическая система управления винтом регулируемого шага, содержашая командный аппарат, блок управления, подключенный к электропздравличеокому приводу, механически связанному с лопастями винта регулируемого шага и электрически связанному с входом блока управления, отличающаяся тем, что, с целью повышения надежности управления и снижения расхода энергии на управление электрогидравлическим приводом она снабжена блоком дискретных сигналов, первый выход которого подключен к второму входу блока управления, второй выход - к Ьходу командного аппарата, а вход - к выходу командного аппарата и блоком формирования команды запрета, вход которого подключен к элект рогидравлическому приводу, а выход - к второму входу блока дискретных сигналов, причем блок дискретных сигналов включает параллельно подключенные цепочки, состоящие каждая из последовательно соединена ных элемента ИЛИ, запоминающего, устройства, контактора и делителя напряжения, подключенного к источнику питания.
Источники информации, принятые во внимание при экспертизе
1, Патент Франции № 20О77-63, кл. В 63 Н 25/ОО, 1970 (прототип).
