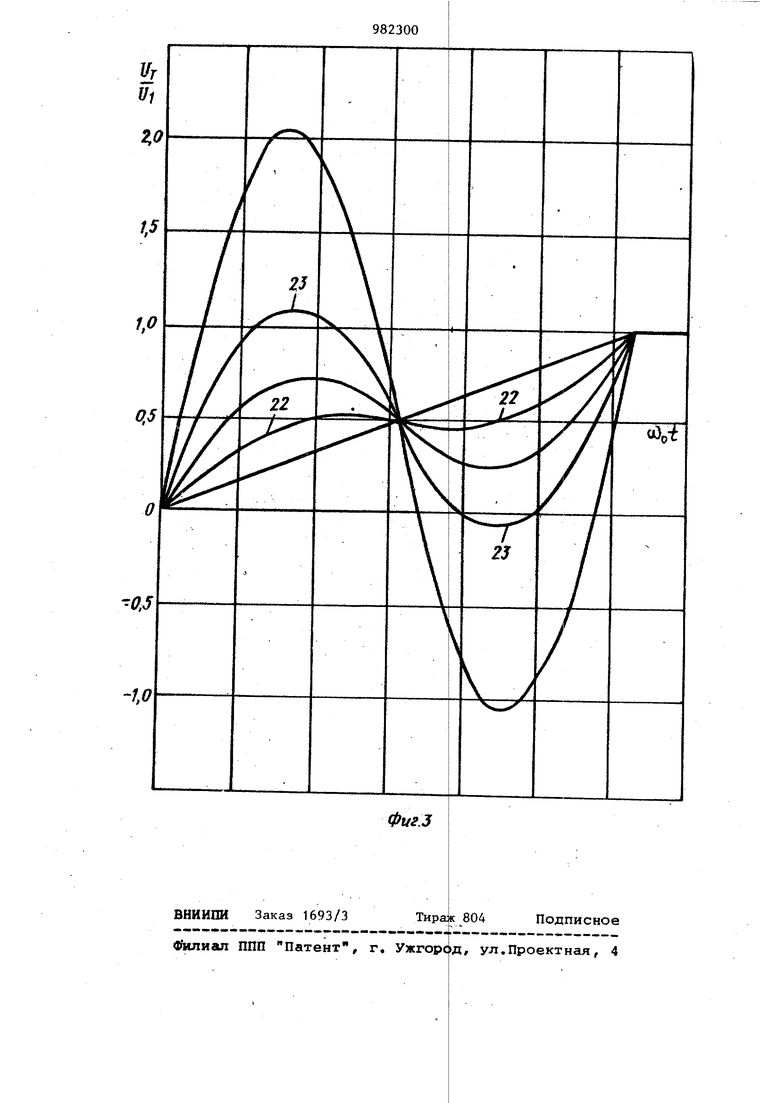
Изобретение относится к подъемнотранспортному машиностроению, а имен но к устройствам для подавления колебаний грузозахватного органа, подвешенного на гибкой связи. Известно устройство для управлени механизмом передвижения подвешенного на гибкой связи грузозахватного органа, содержащее задатчик скорости связанный с управляемым преобразователём, к которому подключен приводной двигатель механизма передвижения а...также датчик длины гибкой связи и командоаппарат Недостатком известного устройства является его сложность при демпфиров нии колебаний грузозахватного органа Известно также устройство для управления механизмом передвижения под вешенного на гибкой связи грузозахватного органа, содержащее задатчик скорости, состоящий из последователь но включенных колебательного звена и интегратора, управляемого преобразователя, вход которого соединен с выходом задатчика скорости, а к выходу подключен приводной двигатель механи ма передвижения, датчик длины гибкой связи (Связанный со входом задатчика скорости, и командоаппарат, выход которого подсоединен к входу элемента задержки времени fzj. Известное устройство позволит дем пфировать колебания грузозахватного органа к концу наперед заданного вре мени переходного процесса. Недостатком известного устройства является сравнительно низкая точност управления, обусловленная сравнительно большой разницей между заданной скоростью равномерного движения механизма передвижения и его действительной скоростью в момент окончания работы узла демпфирования колебаний грузозахватного органа при широком диапазоне изменения длины гибкой связи. Цельно изобретения является повышение точности управления в широком диапазоне изменения длины гибкой свя зи. Указанная цель достигается тем, что устройство снабжено источником эталонного напряжения, вход которого подключен к второму выходу командеannapaTaj нуль-органом, входы которого подсоединены соответственно к выходу источника эталонного напряжения и ныходу задатчнкл скорости, релейны элементом, вход которого соес третьим выходом командоаппарата, а выходы подключе1 ы к соответствую цим входам колебательного звена и интегратора, и ключом, посредством которого выход нуль-органа соединен со вторым входом релейного элемента, а управляющий вход ключа подсоединен к выходу элемента задержки времени; На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - по казан грузозахватный орган на гибкой связи; на фиг. 3 - график изменения относительной скорости механизма передвижения во времени. Устройство для управления механизмом п ередвижения подвешенного на гибкой связи грузозахватного органа содержит задатчик 1 скорости, состоящий из по следовательно включенных колеба 1ельного звена 2 и интегратора Вход соеди|нен с выходом задатчика 1 ,а к его выходку, подклю.чен приводной двига5 механизма передвижения. Даттельчик 6 длины гибкой связи соединен с входом задатчика 1. Выход 7 командоаппарата 8 подсоединен к входу эле9 задержки времени. Вход источника 10 эталонного напряжения подключен к второму выходу 11 командоаппарата 8. Входы нуль-органа 12 подсоединены к выходу источника 10 и выходу задатчика 1. Вход 13 релейного элемента 14 соединен с третьим выходом 15 командоаппарата 11, а выходы подключены к входам колебательного звена 2 и интегратора 3. Выход нуль-органа 12 соединен со вторым входом 16 релейного элемента 14 через ключ 17, управляющий вход 18 которого подсоединен к выходу элемента 9. Грузозахватный орган 19 подвешен на ги5кой связи 20, например канате, котор; й закреплен, например, на барабана тележки 21 крана. Механизм передвижения тележки 21 приводит во враще г1ие двигатель 5. Устройство работает следующим образом. Принцип действия устройства для случая пуска тележки 21 состоит в следующем. В среднем нулевом положении командоаппарата 8 состояние релейного элемента 14 (который может быть выполнен контактным или бескон тактным) обеспечивает отключение вх да интегратора 3 от выхода колебательного звена 2. На вход задатчика поданы задания начальных условий звена 2 от датчика 6 до длины гибко связи. Напряжение на входе звена 2 равно 4-К-Т- где k, - постоянный коэффициент, 8 - длина гибкой связи. If - ускорение .свободного падени При этом напряжения на элементах звена 2 не изменяются во времени и. определяк тся заданными начальньми у ловиями (1). Когда оператор, управляюпций тележ кой 21, переводит командоаппарат 2 в положение, соответствующее заданной скорости движения тележки 21, релей ный элемент 14 срабатывает, подключая вход интегратора 3 к выходу кол бательного звена 2, и обеспечивает работу колебательного звена 2, изменение во времени выходного напряжения Oj которого задается в виде слепляющего дифференциального уравне ния. 1 ггде постоянные величины, при чем Wg связана с заданным временем Т переходного процесса тележки 21 соотношениемIJT В этом случае зависимость U, от времени равна и. 4.(wji--l cosW,i , (41 что следует, из решения дифференциаль ного уравнения (2) при начальных условиях (см. формулу (1): . UjCOl U K И при дополнительном условии, что между постоянными величинами К и Kj установлена выбором параметров звеу на 2 связь . Выходное напряжение Uj интегратора 3 связано с напряжением U. выра1жением Uj(mUjCo),j(i) , (О где UjCO) - начальное значение напряжения Uj, Kj - постоянный коэффициент, в данном случае, когда UjCO) 0, напряжение U изменяется во времени следующим образом: / u,u).,,i(w;l-i),..CT} . где Kj - постоянная величина.. При переводе -командоаппарата 8 в указанное вьш1е положение по его командам появляется эталонное напряжение 0 на выходе источника 10, а элемент 9 вццержки времени отрабатывает заданный интервал времени, который выбирается несколько меньшим, чем заданное время Т переходного процесса. По истечении выбранного интервала времени элемент 9 срабатывает и создает условия для передачи сигнала о выходе нуль-органа 12 через ключ И 7 на вход 16 релейного элемента 14. Когда выходное напряжение задатчика 1 скорости ср авняется с эталонным напряжением U источника 10 эталонного напряжения, нуль-органа 12 срабатывает, на его выходе появляется напряжение, которое через ключ 17 подается на вход 16 релейного элемента 14, что вызывает отпускание последнего При этом вновь напряжения на элементах звена 2 поддерживаются неизменными во времени, выход звена 2 отключается от входа интегратора 3, и напряжение на его выходе перестает изменяться. СледоВательно, при работе описанного устройства напряжение (i, равно („ -р f. Поскольку заданная конечная скорость V- тележки 21 пропорциональна эталонному напряжению Ц , то в соответствии с формулой (8) при работе предлагаемого устройства.-реализуется для случая пуска тележки 21 слеДУЮ1ЦИЙ закон изменения заданной скорости V., тележки 21 во времени ) V при Закон изменения во времени текущей скорости V тележки незначитель но отличается от заданной Vj при ус ловии, что для данного устройства использован электропривод тележки 21, который содержит управляемый преобр;аэоватвль 4 и двигатель 5 и о ладает следую11р{м свойством: скорость двигателя во времени изменяет ся весьма близко к тому, как изменя ется сигнал задания скорости, при этом отличие закона изменения во времени скорости двигателя от закона изменения во времени указанного задахяцего сигнала тем меньше, чем медленнее теми изменения во времени задающего сигнала. Такими электр приводами для механизмов горизонтал ного передвижения электрических кра нов, переходные процессы которых сравнительно длительны и составляют обычно не менее 4-8 с, являются электроприводы с двигателями постоя ного или переменного Tojcai с управля мыми преобразователями и контураю скорости, включакщими регулятор ско рости и датчик скорости двигателя (например, известная система с посл довательной коррекцией и подчиненным регулированием параметров с дни .гателем постоянного тока). Если при указанных условиях теку щая скорость тележки изменяется сог ласно формулы (9), то ускорение тележки, связанное с ее скоростью как , равно О при t О при о прм t (10) При этом отклонение,х, грузозахв ного органа 19 от положения равиове сия, связано с ускорением а| тележки дифференциальным уравнением при нулевых начальных условиях для отклонения и производной этого отклонения Х(0)-0 dK S-(0)«:0 отклонение „ изменяется во времени следующим образом О пои t О (l-cc5Wj,i) npw (13) .%CilH Сл«довательно, по окончании заданного времени Т переходного процесса о тележки когда i Т. x, dx олебаний грузозахватного оргавремя TO полностью успокаиваПр веденные на фиг. 3 зависимост б носительной скорости тележки от - време ш иллюстрируют влияние периода . собственных колебаний грузозахватногооргана, равного на хар{актер изменения скорости в пропуска %ележкИ, а именно: чем цессе Т))г, тем в больших пределах больше скорость тележки в процесизменяетсяпуска. се ее Пр€)длагаемое устройство обеспечи- т остоянное время переходного вает npouedca тележки, равное заданному X. независимо от дпйны Р гибкой Действительнс, пусть длина связи. связи 20 такова, что гибкой перед пуском двигателя 5 1,5. 21 в колебательное звено 2 тележйи от датчика 6 длины - гибкой подаются соответствуюзчие. начальные уссвязи(5), и скорость тележки измеловияво времени в соответствии няется: 22 на фиг. 3. Если при сле криюй пуске тележки 21 длина гибкой дунщем 20 изменилась, так что стало связи t 2,5, то перед этим пуском 2 подаются начальные условия соответствующие новой длине гиб20, и скорость тележки 21 сиязи будет изменяться согласвремени 23 на фиг. 3. При этом пуска тележки 21 для обеих длин гибкой связи 20 будет указанных причем колебания грузоодинаговым. ного органа к концу этих про)ахва пуска станут нулевыми. дессои Устройство обеспечивает успокоение колебаний грузозахватного органа за,заданное время tp не только при пуске, но и при торможении тележ ки 21. В самом деле, если оператор, управляющий тележкой 21, переводит командоаппарат 8 из положения, соотвествутещего.заданной скорости, в нулевое положение, то по команде командоаппарат 8 выходное напряжение источника 10 уменьшается до нуля, начинает отрабатьгеать заданное время элемент 9 выдержки времени и срабатывает релейный элемент 1А, который обеспечивает подключение выхода звена 2 ко входу интегратора 3. При ЭТО командоаппарат 8 обеспечивает изменение знака выходного напряжения колебательного э.вена 2 по сравнению с рассмотренным ранее случае пуска. Начальное значение выходного напряжения интегратора 3 рав но и , которое соответствует началь ной скорости V при торможении. Сиг нал заданной скорости Vjj изменяется во времени следукицим образом: ,/t| W в соответствии с чем ат.тС) t т.е. закон изменения во времени уск I рения тележки при ее торможении « Фавен взятому с обратным знаком закону изменения - ускорения ки при ее пуске, а в таком случае для нулевых начальныхусловий (12) зависимости от времени отклонения Хр грузозахватного органа при торможении равна взятой с обратным знаком зависимости (13) отклонения груза при пуске «т() Следовательно, при торможении тележки, за заданное время Т, колебания груза устраняются, а скорость тележки доводится до нулевого значения . Наличие в предлагаемом устройстве элемента 9 выдержки времени, ключа 17, нуль-органа 12 и источника 10 эталонного напряжения обеспечивает получение по окончании переходного процесса пуска или торможения заданной конечной скорости тележки 21 с высокой точностью, так как вход интегратора 3 отключается от выхода звена 2 в функции скорости тележки 21, когда эта скорость достигает заданного значения, определяемого выходным напряжением источника 10, блогодаря чему повышается точность управления механизмом Лередвижения в широком диапазоне изменения дпины гибкой связи.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для демпфирования колебаний грузозахватного органа крана | 1977 |
|
SU1053443A1 |
| Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1979 |
|
SU1018899A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1981 |
|
SU965959A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для регулирования асинхронного двигателя | 1983 |
|
SU1202006A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для управления механизмом горизонтального перемещения подвешенного на гибкой связи грузозахватного органа | 1982 |
|
SU1178685A1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА РАБОЧИХ ВЕТВЯХ ГРУЗОВОГО КАНАТА СТРЕЛОВОГО КРАНА | 2002 |
|
RU2235054C2 |
| Устройство для управления электроприводом одноковшового экскаватора | 1979 |
|
SU926181A1 |
УСТРОЙСТВО ДЛЯ ЗТ1РАВЛЕНИЯ МЕХАНИЗМОМ ПЕРЕДВИЖЕНИЯ ПОДВЕШЕННОГО НА ГИБКОЙ СВЯЗИ ГРУЗОЗАХВАТНОГО ОРГАНА, содержащее.задатчик скороста, состоящий из последовательно включенных колебательного звена и интегратора, управляемого преобразователя, вход которого соединен с выходом задатчика скорости, а к выходу подключен приводной двигатель механизма передвижения, датчик длины гибкой связи, связанный со входом задатчика скорости, и ксжандоаппарат, выход которого подсоединен к входу элемента задержки времени, о т л и ч а е е с я тем, что, с целью повьшения точности управления в широKott диапазоне изменения дпины гибкой связи, оно снабжено источником эталонного напряжения, вход которого подключен к второму выкдду крмандоаппарата, нуль-органом, входы которого подсоединены соответственно к выходу источника эталонного напряжения и выходу задатчика скорости, релейным элементом, вход которого соединен с третьим выходом командо аппарата, а выходы подключены к соответствующим входам колебательного звена и интегратора, и ключом, посредством которого выход нуль-органа соединен со вторым входом релейного элемента, а управляющий вход ключа подсоединен к выходу элемента задержки времени.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Carbon Zudwig Automafisierung von Greiferkranen Siemens Z, 1975, 49, 2, c | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
