Изобретение относится к области подъемно-транспортного машиностроения, а именно к способам демпфироваНин колебаний пЬдвешеннйго на гибкий связи грузозахватного органа под-ьемно-транспортного средства. Известен способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа подъемно-тран портного средства, в котором вычисляют период собственных колебаний грузозахватного органа и осуществляют движение механизма передвижения подъемно-транспортного средства с заданным ускорением на соответствующих временных интервалах { Известен также способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа подъемно-транспортного средства, в которой измеряют скорость механизма передвижения подъемно-транспортного средства, вычисляют период. собственных ijoлебаний грузозахватного органа и ocy ществляют движение упомянутого механизма с заданным ускорением на соо ветствующих временных интервалах, пр чем на первом временном интервала ос ществляют движение механизма с постоянным ускорением, затем на втором временном интервале поддерживают движение механизма с ускорением, рав ным нулю, при этом на последнем временном интервале осуществляют движение механизма с ускорением,равным ускорению на первом временном интервале до достижения механизмом задан ной скорости Г2 . Недостатком известных способов является сравнительно большое время, необходимое дпя демпфирования колеба |НИй грузозахватного органа. Целью изобретения является умень ение времени демпфирования колеба НИИ. грузозахватного органа. Цель достигается тем, что движени на первом временном интервале заканчивают при достижении механизмом заданной скорости, движение на втором временном интервале оканчивают в мо мент времени, равный одной шестой пе риода собственных колебаний грузозахватного органа, после чего на третьем временном интервале осуществляют движение механизма до дости жения нм начальной скорости с ускоре нием, равным по величине и противо положном по знаку ускорению на первом временном интервале, затем осуществляют движение механизма на четвертой временном интервале с ускорением, равнымНулю до момента времени, равно1о одной третьей периода собственных колебаний грузозахватного органа, после чего осуществляют движение механизма на упомянутом последнем временном интервале. фрг. 1 показано подъемно-транспортное средство с подвешенным на гибкой связи .грузозахватным органом,на фи1. 2 - графики зависимости ускхзренр я.и скорости механизма от времени, а также зависимости отклонения грузоз ахватного органа от положения равноиесия при пуске; на фиг. 3 график зависимости ускорения, скорости и отклонения грузозахватного органа от положения равновесия при тормонении. Способ демпфирования колебаний подвепенного на гибкой связи грузозахвагного органа подъемно-транспортного средства основан на измерении скорости механизма передвижения подъемно-транспортного средства, вычислении П€:риода собственных колебаний ахватного органа 1и осущегрузовствле ии Движения механизма 2 с задан ны ускорением на соответствующих времег ных интервалах. фиг. 2 приведены зависимости от времени ускорения и скорости механизма 2, а также зависимость 5 отклонения грузозахватного органа 1 от положения равновесия. Согласно настоящему способу на первом временном интервале 6 осуществляют движение механизма с постоянньм ускорением, при этом скорость механи зма изменяется от начального до заданного значения. На втором временном интервале 7 до момента времени 8, равном одной шестой периода собственных колебаний грузозахватного органа 1, осуществляют движение механизма с ускорением, равным нулю. На тре тьем временном интервале 9 осуществляют движение механизма с ускорением, равным по величине и противопочожньм по знаку ускорению на интервале 6 до достижения начальной скорости. На четвёртом временном интервале 10 осуществляют движение механизма с ускорением, равным нулю, до момэнта времени 11, равном одной третье: упомянутого периода колебаНИИ. На последнем временном интервале 12 осуществляют движение механизма с ускорением, равным ускорению на интервале 6 до достижения механизмом заданной скорости, после достижения которой колебания грузозахватного органа устранены. Настоящий способ применим при .условии, что до начала изменения скорости механизма 2 передвижения грузозахватный орган 1 находится в положении равновесия. Способ применим как при разгоне механизма 2, так и при его торможении.

СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ПОДВЕШЕННОГО НА ГИБКОЙ СВЯЗИ ГРУЗОЗАХВАТНОГО ОРГАНА ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА, при котором измеряют скорость механизма передвижения подъемно-транспортного средства, вычисляют период собственных колебаний грузозахватного органа и осуществляют движение упомянутого механизма с заданным ускорением на соответствующих временных интервалах, причем на первом временном интервале осуществляет движение механизма с постоянным ускорением, затем на втором временном интервале поддержи вают движение механизма с ускорением, равным нулю, при этом на последнем временном интервале осуществляют движение механизма с ускорением, равным ускорению на первом интервале, до достижения механизмом заданной скорости, отличающийся тем, что, с целью уменьшения времени демпфирования колеб аний, движение на первом временном интервале заканчивает по достижении механизмом заданной скорости, движение на втором временном интервале оканчивают в момент времени, равный одной шестой периода собственных колебаний грузозахватного органа, после чего на третьем временном интервале осуществляют движение механизма до достижения им начальной скорости с ускорением, равным по величине и противоположньы по знаку ускорению на первом временном илтервале, затем осуществляют движение механизма на четвертом временном интервале с ускорением, равным нулю, до момента времени, равного одной третьей 00 периода собственньк колебаний грузозахватного органа, после чего осусо ществляют движение механизма.на . упомянутом последнем временном интервале .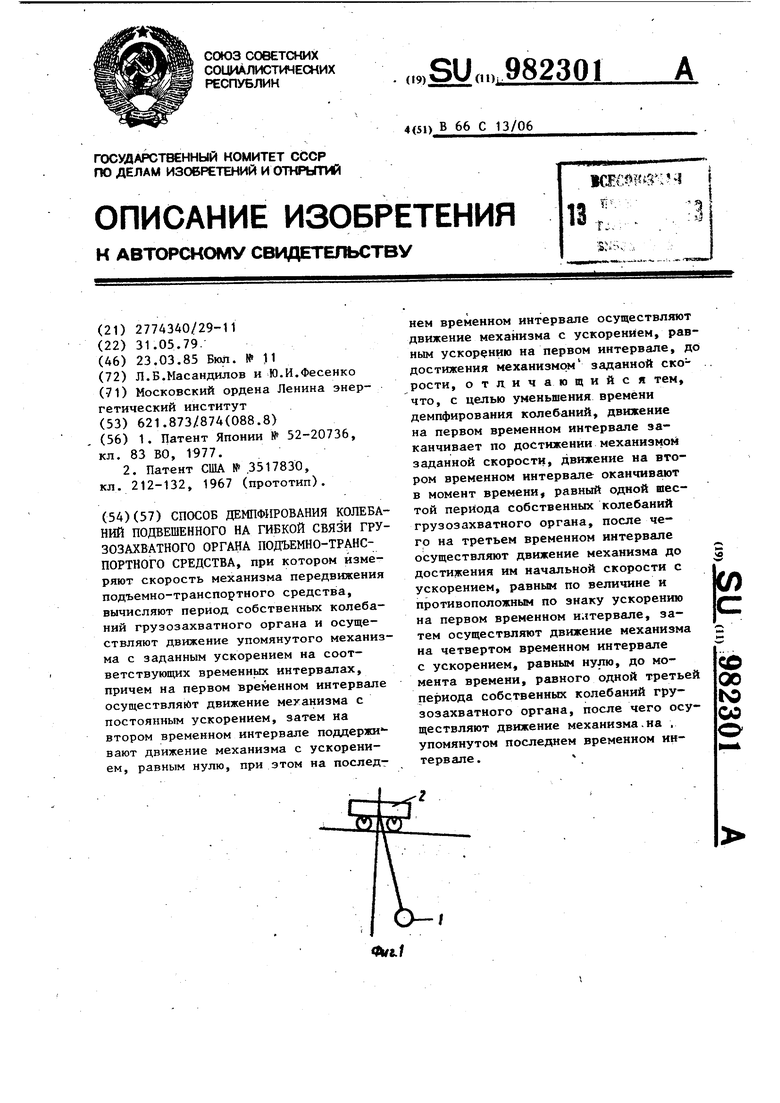
6 789
Ю П /Z
Фи1,2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Пуговица | 0 |
|
SU83A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № .3517830, кл | |||
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
