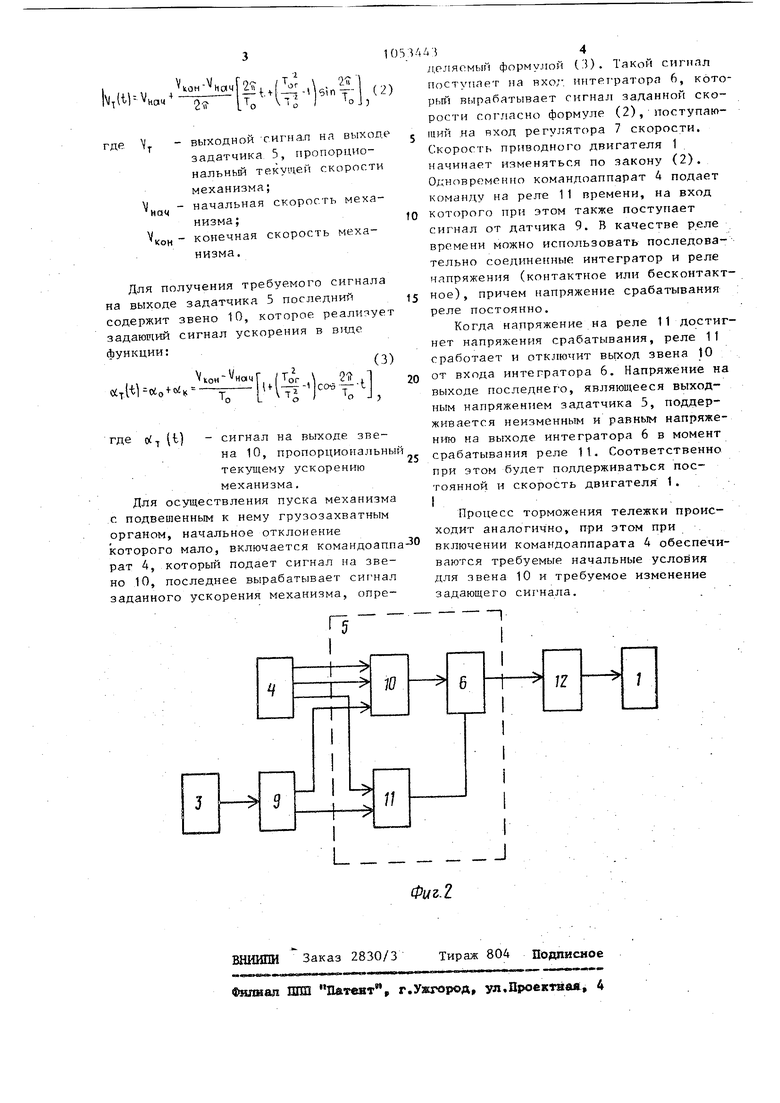
11 Ичобретеиие относится к области подъемио-траисп(ртяого машиностроения, а тменно к устройствам для демпфирования колебаний грузозахватных органов кранов. Известно устройстве для демпфироиания колебаний грузозахватного органа крана, содержащее задатчик скорости, связанный с двигателем механизма для перемещения грузозахватного органа ij . Известно устройство, для демпфирования колебаний грузозахватного органа крана, содержащее двигатель механизма для перемещения грузозахватного органа, подключенный к управ ляемому преобразователю, а также дат чик длины грузового каната и командо аппарат, связанный с задатчиком скорости, которьй выполнен с интегратором. Соединенным через регулятор скорости и регулятор токл с управляемым преобразователем 2J . Недостатком известных устройств является неудобство эксплуатации, обусловленное сравнительно большим временем демпфирования колебаний. Цель изобретения - повьпиение удоб ства эксплуатации за счет уменьшения демпфирования колебаний грузозахватного органа. Это достигается тем, что предложенное устройство снабжено датчиком частоты колебаний грузозахватного органа, а задатчик скорости снабжен колебательным звеном и реле времени, входы которого связаны соответственно с командоаппаратом и выходом датчика частотьг колебаний грузозахватного органа, а выход - с входом инте ратора,второй вход которого подключен к выходу колебательного звена, приче вход датчика частоты колебаний грузо захватного органа подсоединен к выходу датчика длины грузового каната, а второй выход связан с входом колебательного звена, второй вход которого соединен с командоаппаратом. I На фиг. 1 изображена функциональная схема предложенного устройства; на фиг. 2 - то же, с тахогенератором Устройство для демпфированияколе баний грузозахватного органа крана .содержит- двигатель 1 механизма для перемещения грузозахватного органа, подключенный к управляющему преобразователю 2, а также датчик 3 длины грузового каната и командоаппарат 4, 3 связанный с надатчиком ; скорости, который выполнен с интегратором fS, соединенн м через регулятор 7 скорости и регулятор 8 тока с преобразователем 2, Устройство снабжено датчиком 9 колебаний грузозахватного органа, а задатчик 5 снабжен колебатель тым звеном 10 и реле 11 времени, входы которого связаны соответственно с командоаппаратом 4 и входом датчика 9, а выход - с входом интегратора 6, второй вход которого подключен к выходу звена 10, причем вход датчика 9 подсоединен к выходу датчика 3, ,а второй выход связан с входом звена 10, второй вход которого соединен с командоаппаратом 4, Регуляторы 7 и 8 входят в систему 12 управления электроприводом. Двигатель 1 механизма может быть, например, двигателем грузовой тележки крана. Устройство может быть выполнено с тахогенератором 13 и датчиком 14 тока с шунтом 15, Устройство работает следующим образом, В данном приводе скорость двигателя во времени изменяется.по закону, совпадающему с изменением выходного сигнала задатчика 5, Для. демпфирования колебаний грузозахватного органа при разгоне (торможении) механизма последний движется с ускорением, содержащим постоянную и переменную составляющие. Переменная составляющая ускорения определяется следующей зависимостью: o k-«ollW-l COS -Ч о I п где и и - соответственно колебательная и постоянная составляющие ускор.ения механизма; период колебания грузозахватного органа; заданное время переходного проц1сса; время, . Заданное время переходного процесса меньше периода собственного колебания грузозахватного органа. Выходной сигнал задатчика 5 определяется выражением: 3 f|-,jZ4.,Uinf-l ( V V , Чоннач b,( 2ff Uo VT I oj, где - выходной тигнап на выход задатчика 5, пропорциональный текущей скорости механизма; V - начальная скорость механизма;кон - конечная скорость механизма. Для получения требуемого сигнала на выходе задатчика 5 последний содержит звено 10, которое реализуе задающий сигнал ускорения в В1вде (Функции: /Тог 21 ОСтН1 0 о + 1 где of-у (t) сигнал на выходе звена Ю, пропорциональн текущему ускорению механизма. Для осуществления пуска механизм ,с подвешенным к нему грузозахватным органом, начальное отклонение которого мало, включается командоап рат 4, которьт подает сигнал на зве но 10, последнее вырабатывает сигнал заданного ускорения механизма, опре+ 34 деляомый формулой (). Такой сигнал поступает на вхог, интет-ратора 6, который вырабатывает сигнал заданной скорости согласно формуле (2),поступающий на вход регулятора 7 скорости. Скорость приводного двигателя 1 начинает изменяться по закону (2). Одновременно командоаппарат 4 подает команду на реле 11 времени, на вход которого при этом также поступает сигнал от датчика 9. В качестве реле времени можно использовать последовательно соединенные интегратор и реле напряжения (контактное или бесконтактное) , причем напряжение срабатывания ; реле постоянно. Когда напряжение на реле 11 достигнет напряжения срабатывания, реле 11 сработает и отключит звена 10 от входа интегратора 6. Напряжение на выходе последнего, являющееся выходным напряжением задатчика 5, поддерживается неизменным и равным напряжению на выходе интегратора 6 в момент срабатывания реле 11. Соответственно при этом будет поддерживаться постоянной; и скорость двигателя 1. . I: процесс торможения тележки происходит аналогично, при этом при включении командоаппарата 4 обеспечиваются требуемые начальные условия для звена 10 и требуемое изменение задающего сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом передвижения подвешенного на гибкой связи грузозахватного органа | 1979 |
|
SU982300A1 |
| Устройство для поддержания постоянной высоты подъема грузозахватного органа стрелового крана при изменении вылета стрелы | 1988 |
|
SU1523530A1 |
| Устройство для управления грузоподъемным транспортным средством с гибкой подвеской груза | 1981 |
|
SU1017655A1 |
| Устройство для управления электроприводом крановой тележки с грузом на гибком подвесе | 1987 |
|
SU1572986A1 |
| Устройство для управления электроприводами механизмов подъема стрелового крана | 1990 |
|
SU1761657A1 |
| Устройство для поддержания высотыпОд'ЕМА гРузОзАХВАТНОгО ОРгАНА СТРЕлОВОгОКРАНА пРи изМЕНЕНии ВылЕТА СТРЕлы | 1978 |
|
SU800111A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU730939A1 |
| Устройство для определения ускорения электрода регулятора дуговой печи | 1981 |
|
SU1086558A1 |
| Способ гашения колебаний груза и устройство для его осуществления | 1989 |
|
SU1801923A1 |
| Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1979 |
|
SU1018899A1 |
УСТРОЙСТВО ДЛЯ ДЕМПФИРОВА НИЯ КОЛЕБАНИЙ ГРУЗОЗАХВАТНОГО ОРГА КРАНА, содержащее двигатель механи для перемещения грузозахватного ор на, подключенный к управляемому преобразователю, а также датчик длины грузового каната и коман аппарат, связанный с задатчико скорости,- который выполнен с Г-/---1 11Н31 интегратором, соединенным через регулятор скорости и регулятор тока с управляемым преобразователем, о тл и ч а ю п; е е с я тем, что, с целью повьичения удобства эксплуатации за счет уменьшения времени демпфирования колебаний грузозахватного органа, оно снабжено датчиком частоты колебаний грузозахватного органа, а задатчик скорости снабжен колебательным звеном и реле времени, входы которого связаны соответственно с командоаппаратом и выходом датчика частоты колебаний грузозахватного органа, а выход с входом интегратора, второй вход которого подключен к выходу колебательного звена, причем вход датчика частоты колебаний грузозахватного органа подсоединен к выходу датчика длины грузового каната, а второй выход связан с входом колебательного звена, второй вход которого соединен с командоаппаратом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для развальцовки труб | 1985 |
|
SU1278079A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Экспресс-информация ВИНИТИ | |||
| Автоматизированный электропривод | |||
| Электротехнология | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
