2. Спсхзоб демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонг тального передвижения подъемно-транспортного средства согласно которому осуществляют движение механизма с заданным ускорением на трех временных интервалах, причем на первом интервале осуществляют движение с постоянным ускорением до достижения механизмом заданной средней скорости на трех интервалах, на вторам интерзале осуществляют движение механизма с упомянутой средней скоростью, а на третьем интервале осуществляют движение механизма до заданной конечной скорости с ускорением, равным ускорению на первом интервале, отличающийс я тем, что, с целью расширения области применения, измеряют.время от начала движения экстреьального значения приложенной к механизму внешней силы, после чего через измеренный промежуток времени начинают движением механизма на третьем временном интервале.
3. Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства согласно которому осуществляют движение механизма с заданным ускорением натрех временных интервалах, причем . на первом временном интервале осуществляют движение с постоянным ускорением до достижения механизьюм заданной средней скорости на трех интервалах, на втором интервале осуществляют движение механизма с упомянутой средней скоростью, а на третьем интервале осуществляют движение механизма до заданной конечной . скорости с ускорением,равным ускорению на первом временном интервале,о т л ичающийся тем,что,с целью расширения области применения, измеряют время от начала движения механизма на втором временном интервале до достижения экстремального значения моментом привода механизма, после чего через измеренный промежуток времени начинают движение механизма на третьем временном интервгше.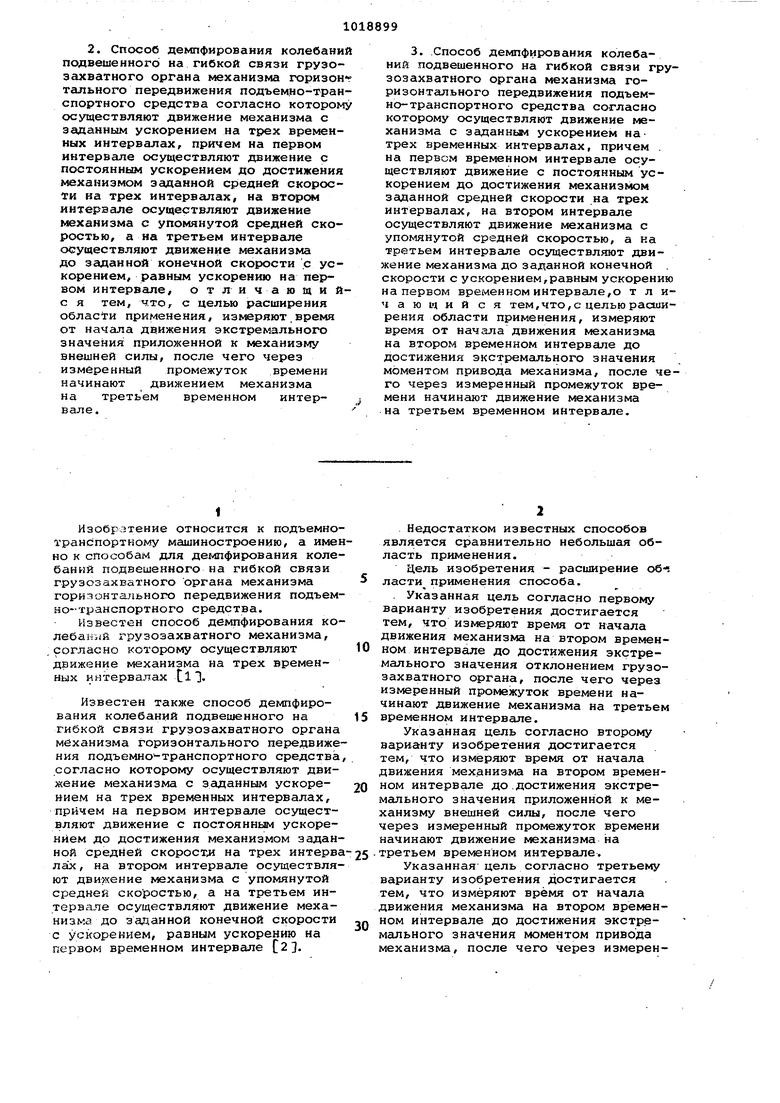
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ успокоения колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства (его варианты) | 1981 |
|
SU965959A1 |
| Устройство для управления механизмом передвижения подвешенного на гибкой связи грузозахватного органа | 1979 |
|
SU982300A1 |
| Устройство для демпфирования колебаний грузозахватного органа крана | 1977 |
|
SU1053443A1 |
| Устройство для управления механизмом горизонтального перемещения подвешенного на гибкой связи грузозахватного органа | 1982 |
|
SU1178685A1 |
| Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа подъемно-транспортного средства | 1979 |
|
SU982301A1 |
| Система управления | 1981 |
|
SU996995A1 |
| Синхронно-синфазный электромагнитный вибропривод | 1980 |
|
SU964885A1 |
| Способ управления механизмом передвижения подвешенного на канате груза | 1989 |
|
SU1794865A1 |
| СПОСОБ ЗАПУСКА ПИРОТЕХНИЧЕСКИХ УСТРОЙСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476712C1 |
| Экстремальный регулятор для резонансногоОб'ЕКТА | 1979 |
|
SU798705A1 |
1. Способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства, согласно / которому осуществляют движение механизма с заданным ускорением на трех временных интервалах, причем на первом интервале осуществляют движение с постоянным ускорением до достижения механизмом заданной средней скорости на трех интервгшах, на втором интервале осуществляют движение механизма с упомянутой средней скоростью, a на третьем интервале осуществляют движение механизма до заданной конечной скорости с ускорением, равным ускорению на первом интервале, о j л и ч a ющ и и с я тем, что, с целью расширения области применения, измеряют время от начала движения механизма на втором временном интервале до (Л достижения экстремального значения отклонением грузозахватного органа, после чего через измеренный промежуток времени начинают движение меха- низма на третьем временнсм интервале. СХ) СХ) со со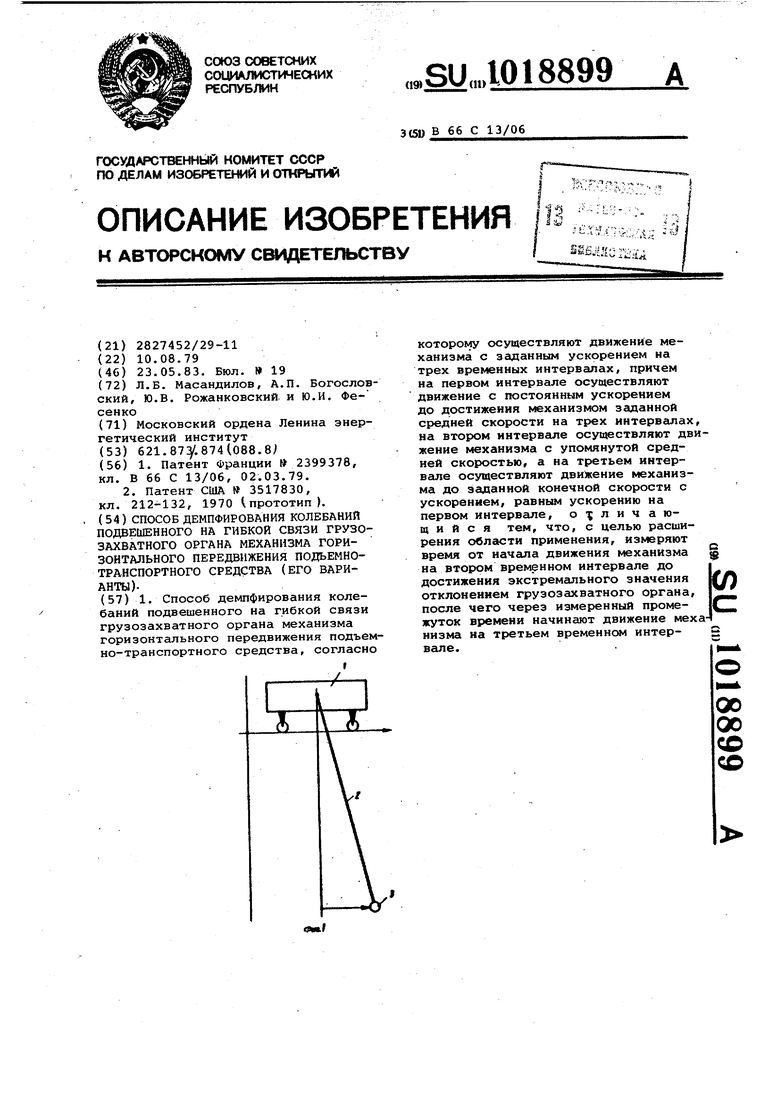
i
Изобр.этение относится к подъемнотранСпортному машиностроению, а именно к способам для демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства.
Известен способ демпфирования колебаний грузозахватного механизма, ,согласно которому осуществляют движение механизма на трех временных интервалах tl 3Известен также способ демпфирования колебаний подвешенного на гибкой связи грузозахватного органа механизма горизонтального передвижения подъемно-транспортного средства согласно которому осуществляют движение механизма с заданным ускорением на трех временных интервалах, причем на первом интервале осуществляют движение с постоянным ускорением до достижения механизмом заданной средйей скоростл на трех интерва лах, на втором интервале осуществляют движение механизма с упомянутой средней скоростью, а на третьем интервале осуществляют движение механизма до заданной конечной скорости с ускорением, равным ускорению на первом временном интервале 2.
Недостатком известных способов является сравнительно небольшая область применения.
Дель изобретения - расширение обч ласти применения способа.
Указанная цель согласно первому варианту изобретения достигается тем, что измеряют время от начала движения механизма на втором временном интервале до достижения экстремального значения отклонением грузозахватного органа, после чего через измеренный промежуток времени начинают движение механизма на третьем временном интервале.
Указанная цель согласно второму варианту изобретения достигается тем, что измеряют время от начала движения механизма на втором временном интервале до.достижения экстремального значения приложенной к механизму внешней силы, после чего через измеренный промежуток времени начинают движение механизма на третьем временном интервале.
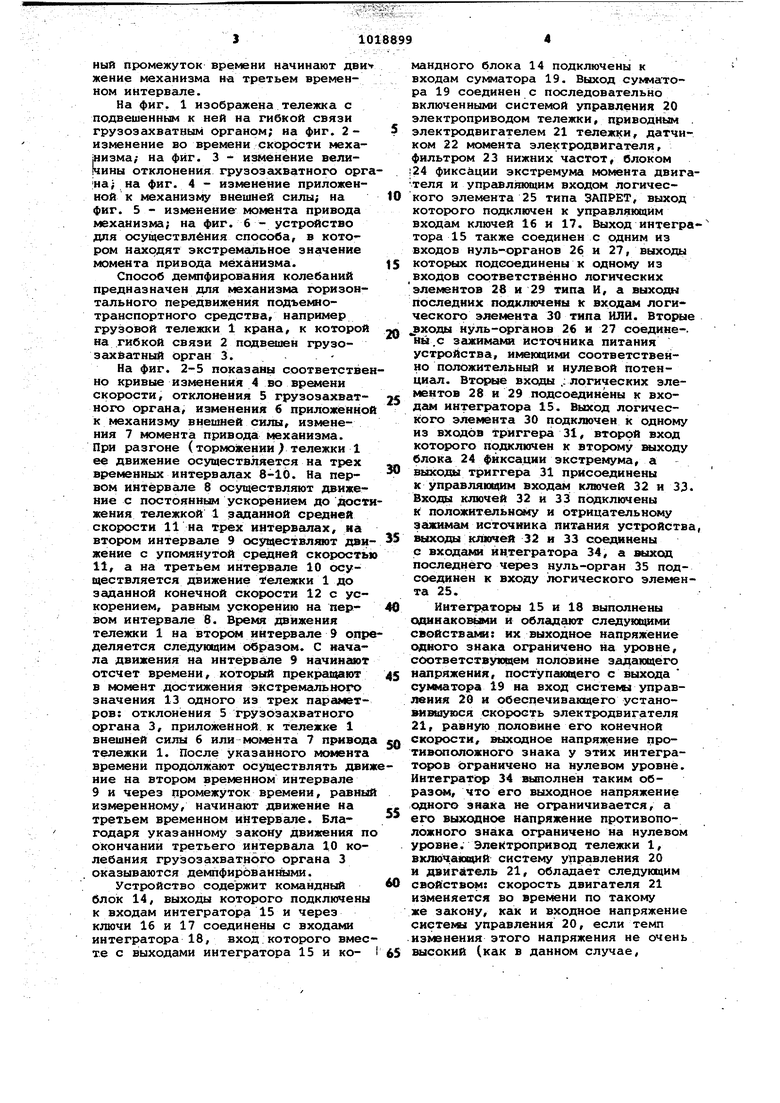
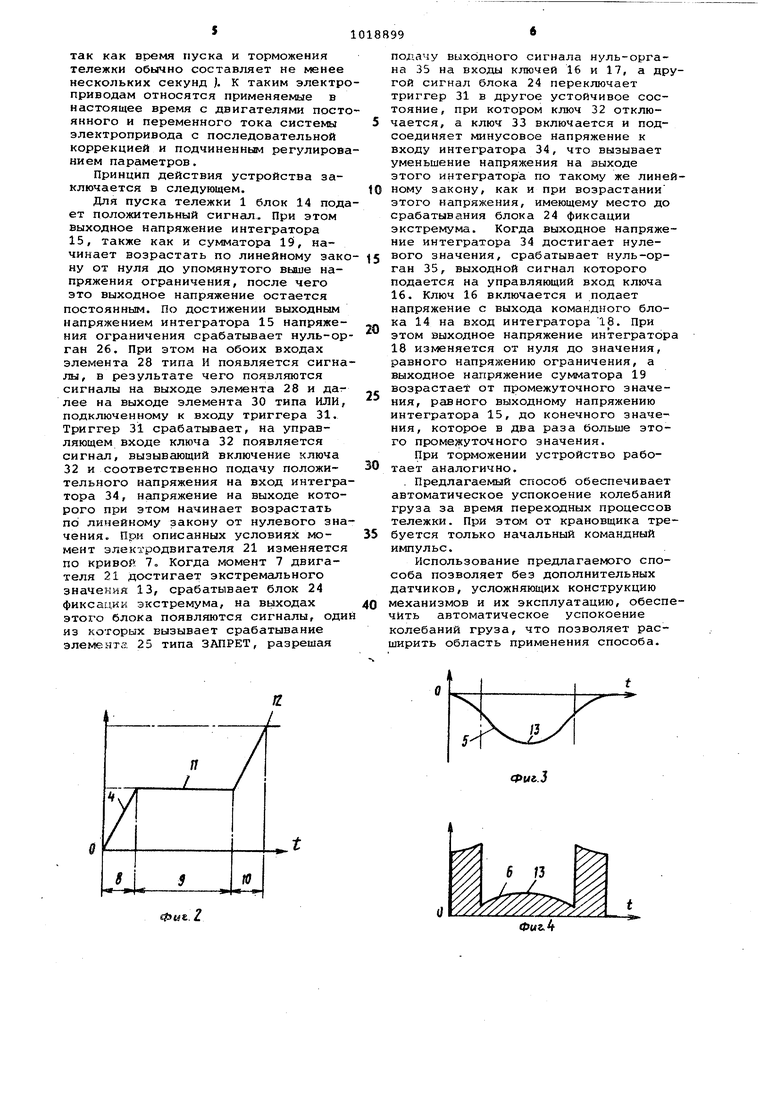
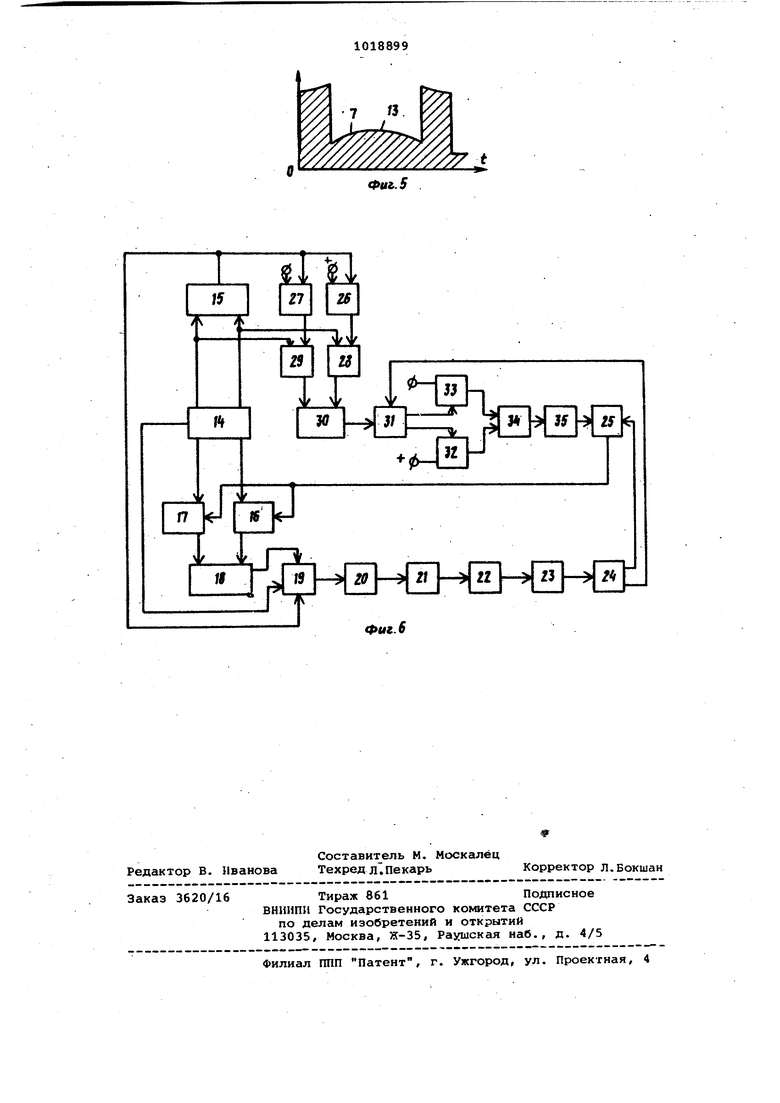
Указанная цель согласно третьему варианту изобретения достигается тем, что измеряют время от начала движения механизма на втором временном интервале до достижения экстремального значения моментом привода механизма, после чего через измеренный промежуток времени начинают дви жение механизма на третьем временном интервале. На фиг. 1 изображена тележка с подвешенным к ней на гибкой связи грузозахватным органом; на фиг. 2изменение во времени лСкО рости меха|Низма; на фиг. 3 изменение велимины отклонения грузозахватного орг на; на фиг. 4 - изменение приложенной к механизму внешней силы; на фиг. 5 - изменение момента привода механизма; на фиг. 6 - устр(й1ство для осуществления способа, в котором находят экстремальное значение момента привода механизма. Способ демпфирования колебаний предназначен для механизма горизонтального передвижения подъемнотранспортного средства, например грузовой тележки 1 крана, к которой на гибкой связи 2 подвшоен грузозахватный Орган 3. На фиг. 2-5 показаны соответстве но кривые изменения 4 во времени скорости, отклонения 5 грузозахватного органа, изменения 6 приложенно к механизму внешней силы, изменения 7 момента привода: механизма. При разгоне (торможении ) тележки 1 ее движение осуществляется на трех временных интервалах 8-10. На первом интервале 8 осуществляют движение с постояниьвл ускорением до дост жения тележкой 1 заданной средней скорости 11 на трех инт ервалах, на втором интервале 9 осуществляет дай жение с упомянутой средней скорость 11, а на третьем интервале 10 осуществляется движеиие Фележки 1 до заданной конечной скорости 12 с ускорением, равным ускорению на первом интервале 8. Время движения тележки 1 на втором интервале 9 опр деляется следующим Образом. С начала движения на интервале 9 начингнот отсчет времени, который прекрав ают в момент достижения экстремального значения 13 одного иэ трех параметров: отклонения 5 грузозахватного органа 3, приложенной, к тележке 1 внешней силы 6 или момента 7 привод тележки 1. После указанного мсмлента времени продолжают осуществлять дви иие на втором временном интервале 9 и через промежуток времени, равны измеренному, начинают движение на третьем временном интервале. Благодаря указанному закону движения п окончании третьего интервала 10 колебания грузозахватного органа 3 оказываются демпфированными. Устройство содержит командный блок 14, выходы которого подключены к входам интегратора 15 и через ключи 16 и 17 соединены с входами интегратора 18, вход которого вмес те с выходами интегратора 15 и командного блока 14 подключены к входам сумматора 19. Выход cyNwaTOра 19 соединен с последовательно включенными системой управления 20 электроприводом тележки, приводным . электродвигателем 21 тележки, датчиком 22 момента электродвигателя, фильтром 23 нижних частот, блоком |24 фиксации экстремума момента двигателя и управлякнцим входом логического элемента 25 типа ЗАПРЕТ, выход которого подключен к управляющим входам ключей 16 и 17. Шлход интегратора 15 также соединен с одним из входов нуль-органов 26 и 27, выходу которых подсоединены к одному из входов соответственно логических элементов 28 и 29 типа И, а выходы последних подключены к входам логического элемента 30 типа ИЛИ. Вторые ходы нуль-сфганов 26 и 27 соедине-. ны с зажимами источника питания устройства, имеющими соответственно положительный и нулевой потенциал. Вторые входы .; логических элементов 28 и 29 подсоединены к входам интегратора 15. Выход логического элемента 30 подключен к одному из входов триггера 31, второй вход которого подислю чен к второму шисоду блока 24 фиксации экстремума, а выходы триггера 31 присоединены к управляющим входам ктвочей 32 и 33. Входы кJЖ)чeй 32 и 33 подключены к положительному и отрицательному зажимам источника питания устройства, клсоды ключей 32 и 33 соединены с входами интегратора 34, а выход последнего через нуль-орган 35 подсоединен к входу логического элемента 25. Интеграторы 15 и 18 выполнены о«динаков{я 1и и обладают следуюо ми свойстваАш: их выходное напряжение САНого знака ограничено на уровне, соответствующем половине задающего напряжения, поступающего с выхода сумматора 19 на вход систекн управления 20 и обеспечивающего устаноШ1В1ШУЮСЯ скорость электродвигателя 21, равную половине его конечной скорости, выходное напряжение противоположного знака у этих интеграторов ограничено на нулевом уровне. Интеграт сф 34 выполнен таким образом, что его выходное напряжение одного знака не ограничивается, а его выходное напряжение противоположного знака ограничено на нулевом уровне. Электропривод тележки 1, вклю чающий систему управления 20 и двигатель 21, обладает следующим свойством: скорость двигателя 21 изменяется во времени по такому же закону, как и входное напряжение сиетекш управления 20, если темп изменения этого иапряжения не очень высокий (как в данном случае. так как время пуска и торможения тележки обычно составляет не менее нескольких секунд ). К таким электр приводам относятся применяемые в настоящее время с двигателями пост янного и переменного тока системы электропривода с последовательной коррекцией и подчиненным регулиров нием параметров. Принцип действия устройства заключается в следующем. Для пуска тележки 1 блок 14 под ет положительный сигнал. При этом выходное напряжение интегратора 15, также как и сумматора IS, начинает возрастать по линейному зак ну от нуля до упомянутого ВЕЛие напряжения ограничения, после чего это выходное напряжение остается постоянным. По достижении выходным напряжением интегратора 15 напряжения ограничения срабатывает нуль-ор ган 26. При этом на обоих входах элемента 28 типа И появляется сигна лы, в результате чего появляются сигналы на выходе элемента 28 и далее на выходе элемента 30 типа ИЛИ подключенному к входу триггера 31. Триггер 31 срабатывает, на управляющем входе ключа 32 появляется сигнал, вызывающий включение ключа 32 и соответственно подачу положительного напряжения на вход интегра тора 34, напряжение на выходе кото рого при этом начинает возрастать по линейному закону от нулевого зн чения. При описанных условиях момент электродвигателя 21 изменяетс по кривой 7о Когда момент 7 двигателя 21 достигает экстремального значения 13, срабатывает блок 24 фиксации экстремума, на выходах этого блока появляются сигналы, од из которых вызывает срабатывание элемента. 25 типа ЗАПРЕТ, разрешая подачу выходного сигнала нуль-органа 35 на входы ключей 16 и 17, а другой сигнал блока 24 переключает триггер 31 в другое устойчивое состояние, при котором ключ 32 отключается, а ключ 33 включается и подсоединяет минусовое напряжение к входу интегратора 34, что вызывает уменьшение напряжения на выходе этого интегратора по такому же линейному закону, как и при возрастании этого напряжения, имеющему место до срабатывания блока 24 фиксации экстремума. Когда выходное напряжение интегратора 34 достигает нулевого значения, срабатывает нуль-орган 35, выходной сигнал которого подается на управляющий вход ключа 16. Ключ 16 включается и подает напряжение с выхода командного блока 14 на вход интегратора 18. При этом выходное напряжение интегратора 18 изменяется от нуля до значения, равного напряжению ограничения, а выходное напряжение сумматора 19 возрастает от промежуточного значения, равного выходному напряжению интегратора 15, до конечного значения, которое в два раза больше этого промежуточного значения. При торможении устройство работает аналогично. Предлагаемый способ обеспечивает автоматическое успокоение колебаний груза за время переходных процессов тележки. При этом от крановщика требуется только начальный командный импульс. Использование предлагаемого способа позволяет без дополнительных датчиков, усложняющих конструкцию механизмов и их эксплуатацию, обеспечить автоматическое успокоение колебаний груза, что позволяет расширить область применения способа.
Л
п
Фт.З
8
ю
-
ФИ.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЭКСТРАКТ КОРЫ ДЕРЕВА РОДА CORYNANTHE И ЕГО ПРИМЕНЕНИЕ, ЛЕКАРСТВЕННЫЕ СРЕДСТВА, ПИЩЕВЫЕ ПРОДУКТЫ И ФАРМАЦЕВТИЧЕСКИЕ КОМПОЗИЦИИ, ЕГО СОДЕРЖАЩИЕ | 2006 |
|
RU2399378C2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 3517830, кл | |||
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
