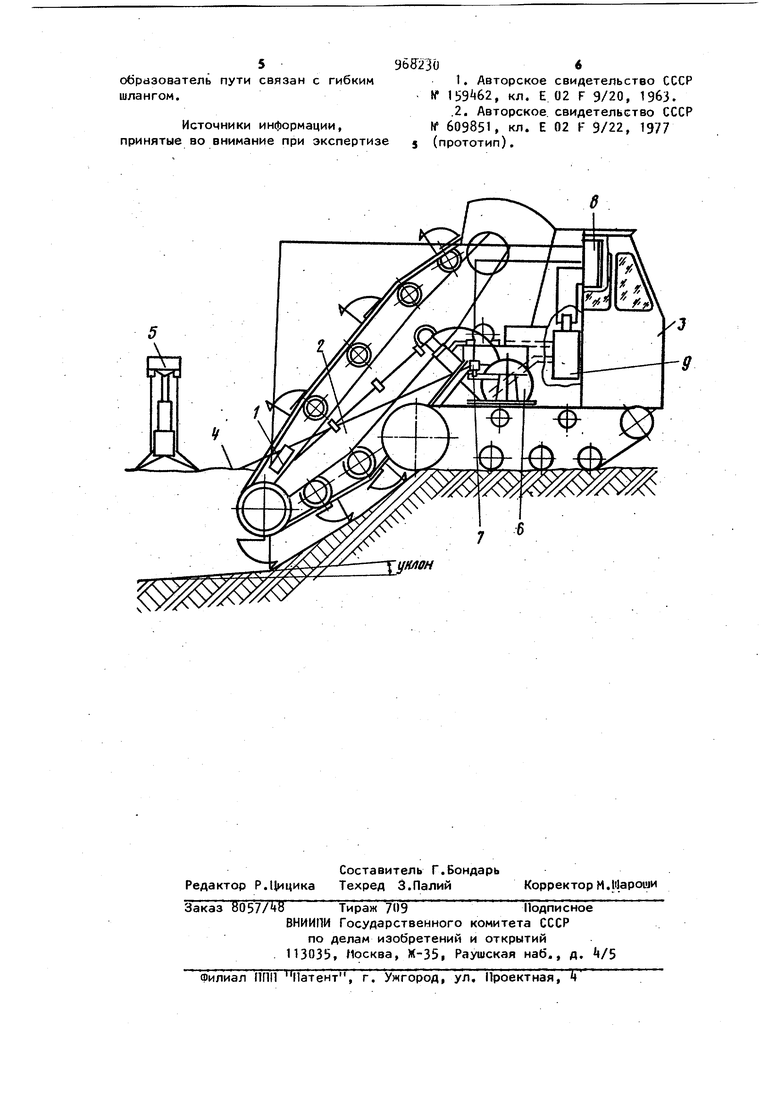
отсчетный резервуар, соединенный гиб ким шлангом с исполнительным элементом, выполненным в виде электрогидрозолотника, снабжено измерительными преобразователями давления и пройденного пути, соединенными с исполнительным .элементом посредством вычислительного блока, причем измерительный преобразователь пути связан с гибким шлангом. На чертеже схематически представлено устройство для управления траекторией движения рабочего органа экскаватора - траншеекопателя. Оно включает измерительный преобразователь 1 давления, на рабочем органе 2 экскаватора-траншеекопателя 3 соединенный гибким шлангом с отсчетным резервуаром 5, установленным в начале прокладываемой траншеи. Шланг, заполненный незамерзающей в интервале рабочих температур жидкостью, наматывается на барабан 6, где также установлен измерительный преобразователь 7 длины пути. С измерительными преобразователями 1 и 7соединен через вычислительный блок 8исполнительный элемент (электрогидрозолотник) 9. Измерительный преобразователь 7 пути кинематически связан с гибким шлангом Ц. Устройство работает следуклцлм образом. Измерительный преобразователь дав ления на рабочем органе 2 экскаватора-траншеекопателя 3 на своем выходе формирует сигнал, пропорциональный высоте столба жидкости между уро нем отсчетного резервуара 5 и положе нием измерительного преобразователя 1 давления. Гибкий шланг i, разматываясь с барабана 6, кинематически воздействует на измерительный преобразователь 7 пути, который отсчитыва ет длину шланга k. Сигнал от измериг тельного преобразователя 7 пути пост пает Нч1 схему формирования вычислительного блока 8, на выходе которого образуется опорный сигнал, пропорциональный длине выполненной траншеи и заданному уклону ее дна. Данный сигнал затем сравнивается на элемент сравнения вычислительного блока 8 с сигналом, полученным от измерительного преобразователя 1 давления. Полученный сигнал рассогласования пост пает на релейный элемент вычислитель ного блока 8 и, если его величина пре вышает выбранные допуски на отклонение профиля дна траншеи от заданного, релейный элемент формирует на С9оем выходе управляющий сигнал, который поступает через согласующуюся часть вычислительного блока 8 на исполнительный элемент 9 управляющий положением рабочего органа 2 экскаватора-траншеекопателя 3 в вертикальной плоскости. После окончания прокладки траншеи экскаватор-траншеекопатель 3 возвращается к началу трассы, при этом гибкий шланг автоматически наматывается на барабан 6. Данная конструкция устройства для управления траекторией движения рабочего органа экскаватора-траншеекопателя обеспечивает прокладку траншей с заданным уклоном дна при минимальных допусках независимо от рельефа поверхности почвы без специальной подготовки трассы, не требует установки дополнительного оборудования и. облег-. чает условия работы машиниста экскаватора, так как базовая траектория рассчитывается согласно сигналу измерительного преобразователя пути от начала траншеи, и при этом исключается накопление ошибки. Отсчет координаты дна траншеи производится по величине столба жидкости от уровня отсчетного резервуара. Применение для измерения величины столба жидкости измерительного преобразователя давления позволяет сделать систему герметичной. Формула изобретения Устройство для управления траекторией движения рабочего органа экскаватора-траншеекопателя, содержащее отсчетный резервуар, соединенный гибким шлангом с исполнительным элементом, выполненным в виде электрогидрозолотника, отличающееся тем, что, с целью обеспечения заданной величины уклона дна траншеи путем повышения точности работы и чувствительности устройства, оно снабжено измерительными преобразователями давления и пройденного пути, соединенными с исполнительным элементом при помощи вычислительного блока, причем измерительный преобразователь пути связан с гибким шлангом.
Источники информации, h° 609851, кл. Е 02 F 9/22, 1977 принятые во внимание при экспертизе 5 (прототип).
9Ь8230
1. Авторское свидетельство СССР К , кл. Е 02 F 9/20, 1963.
.2, Авторское, свидетельство СССР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического поддержания заданного уклона дна траншеи к траншеекопателю | 1973 |
|
SU520432A1 |
| Рабочее оборудование траншеекопателя | 1985 |
|
SU1280163A1 |
| Устройство для определения глубины копания одноковшовым экскаватором | 1983 |
|
SU1139965A1 |
| Рабочее оборудование траншеекопателя | 1973 |
|
SU483496A1 |
| ТРАНШЕЕКОПАТЕЛЬ | 2015 |
|
RU2592288C1 |
| Рабочее оборудование одноковшового экскаватора | 1975 |
|
SU692941A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2081232C1 |
| Система автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций преимущественно с негоризонтальным дном и на участках со склонами | 2017 |
|
RU2683451C2 |
| КАБЕЛЕПРОКЛАДОЧНЫЙ КОМПЛЕКС | 2000 |
|
RU2175617C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
