Изобретение относится к области строительной техники, касается вопросов автоматизации управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций на участках с негоризонтальным дном и в местностях со склонами, в том числе в условиях ограниченной видимости.
Известны индикаторные системы для управления работой экскаваторов, основанные на информации от датчиков углового положения стрелы, рукояти и ковша экскаватора (см. Система нивелирования в 3D в применении к экскаваторам, http://www.gsi.ru/art.php?id=631).
В указанных системах для определения вертикального и горизонтального перемещения ковша относительно платформы экскаватора выполняются тригонометрические расчеты на основе текущих углов стрелы, рукояти и ковша с учетом заранее измеренных расстояний между осями вращения этих элементов. Такие индикаторные системы позволяют исключить необходимость привлечения дополнительного персонала для контроля глубины копания при разработке траншей. Ограничением таких систем является необходимость измерения всех расстояний между осями вращения при установке системы на новый экземпляр экскаватора, ввода их значений в контроллер и калибровки программы управления. Кроме того, такие системы чувствительны к наклонам платформы экскаватора.
Известен также электронно-гидростатический глубиномер, принцип работы которого основан на изменении гидростатического давления жидкости в зависимости от высоты (глубины) подъема (опускания) ковша экскаватора. Он содержит электростатический датчик, который находится на ковше экскаватора и гидравлически связан с емкостью (стаканом) с жидкостью на кабине машиниста экскаватора. Емкость устанавливается вдоль оси вращения кабины, чтобы минимизировать влияние кренов платформы экскаватора на измерения глубины ковша.
Датчик воспринимает гидравлическое давление жидкости, пропорциональное высоте (глубине) ковша, и преобразует его в электрический сигнал, поступающий затем на индикатор глубины, в качестве которого может использоваться микроамперметр с нулем на середине шкалы. Для определения проектной глубины дна траншеи имеется задатчик глубины ее копания (см. ГОССТРОЙ СССР, ЦНИИОМТП, Бюро внедрения, Технологические схемы применения новых средств механизации земляных работ, Москва, 1982) - прототип.
Известный глубиномер позволяет исключить необходимость привлечения дополнительного персонала для контроля глубины копания при разработке траншей с ровным горизонтальным дном. Однако он имеет серьезное ограничение при рытье траншей для трубопроводов и инженерных коммуникаций на участках с негоризонтальным дном, связанное с тем, что электронно-гидростатический глубиномер показывает только глубину ковша и не позволяет определить место его положения относительно платформы экскаватора, тогда как проектная глубина дна траншеи на склонах существенно изменяется при смещении ковша относительно кабины экскаватора в горизонтальной плоскости. Поэтому на участках со сложной конфигурацией во время работы экскаватора, оборудованного электронно-гидростатическим глубиномером, приходится привлекать дополнительный персонал, который обеспечивает индикацию машинисту экскаватора глубины копания вдоль траншеи.
Задачей предполагаемого изобретения является создание оборудования для автоматизированного определения и индикации машинисту экскаватора в реальном времени глубины ковша и его смещения в горизонтальной плоскости при одновременном исключении необходимости привлечения дополнительного персонала для контроля глубины копания в процессе разработки траншеи преимущественно с негоризонтальным дном и на негоризонтальных участках (со склоном), в том числе в условиях обводненной траншеи и ограниченной видимости.
Это достигается тем, что в системе автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций преимущественно с негоризонтальным дном и на участках со склонами, содержащей электронно-гидростатический глубиномер, имеющий установленный на ковше экскаватора гидравлически соединенный с открытой и заполненной жидкостью емкостью, расположенной на кабине машиниста экскаватора вдоль ее оси вращения, электростатический датчик перепада давления, индикатор глубины ковша, электрически связанный с электростатическим датчиком перепада давления, и задатчик глубины копания, по изобретению связь электростатического датчика перепада давления с индикатором глубины ковша осуществлена через введенные в состав электронно-гидростатического глубиномера и установленные между ними аналого-цифровой преобразователь сигналов электростатического датчика перепада давления в цифровой код, вход которого соединен с упомянутым электростатическим датчиком, и цифровой вычислитель глубины ковша, вход которого соединен с выходом аналого-цифрового преобразователя, а выход соединен с индикатором глубины ковша. При этом система оснащена ультразвуковым измерителем радиального расстояния от кабины экскаватора до ковша, состоящим из размещенного на ковше в непосредственной близости от датчика перепада давления излучателя ультразвуковых импульсных сигналов, задающего импульсного генератора, связанного с упомянутым излучателем импульсных сигналов, приемника ультразвуковых импульсных сигналов, расположенного на кабине машиниста экскаватора, измерителя времени запаздывания принятых ультразвуковых сигналов, один из входов которого соединен с приемником ультразвуковых импульсных сигналов, а другой его вход соединен с другим выходом задающего импульсного генератора, цифрового вычислителя радиального расстояния до ковша, вход которого соединен с выходом упомянутого измерителя времени запаздывания. В систему также введен цифровой вычислитель горизонтального смещения ковша относительно кабины экскаватора, один из входов которого соединен с цифровым вычислителем радиального расстояния до ковша, другой его вход соединен с выходом цифрового вычислителя глубины. Выход указанного цифрового вычислителя горизонтального смещения связан с индикатором глубины ковша, который подключен к задатчику глубины копания.
Кроме того, датчик перепада давления оснащен дополнительным шлангом, свободный конец которого закреплен в районе кабины машиниста экскаватора, а его полость сообщается с атмосферой.
Применение датчика перепада давления между столбом жидкости в гибком шланге с зафиксированным на кабине машиниста экскаватора верхним концом и атмосферным воздухом обеспечивает возможность прямого определения текущей глубины ковша любой модели одноковшового экскаватора без дополнительных затрат времени на его калибровку и настройку после монтажа оборудования на экскаватор.
Совместное применение в системе установленных на ковше экскаватора датчика перепада давления для измерения глубины ковша и ультразвукового измерителя для определения радиального расстояния от кабины машиниста экскаватора до ковша позволяет в реальном масштабе времени решать геометрическую задачу определения горизонтального смещения и глубины ковша относительно кабины и выводить их на индикатор машиниста экскаватора для сравнения с проектной глубиной траншеи, которая поступает на индикатор глубины с задатчика глубины копания.
Наличие в составе ультразвуковым измерителем радиального расстояния от кабины экскаватора до ковша измерителя времени запаздывания принятых ультразвуковых импульсных сигналов необходимо для фиксации интервала времени от момента подачи импульса от установленного на ковше излучателя до момента появления первого сигнала на выходе прикрепленного к кабине экскаватора приемника ультразвуковых импульсных сигналов, который пропорционален текущему радиальному расстоянию до ковша 1.
Введение в состав электронно-гидростатического глубиномера вычислителя горизонтального смещения ковша относительно кабины экскаватора, связанного с индикатором глубины ковша, объясняется необходимостью определять глубину копаемой траншеи с негоризонтальными участками и на склонах.
Оснащение датчика перепада давления шлангом, свободный конец которого закреплен на кабине экскаватора и сообщается с атмосферой, дает возможность определять глубину ковша в обводненных траншеях.
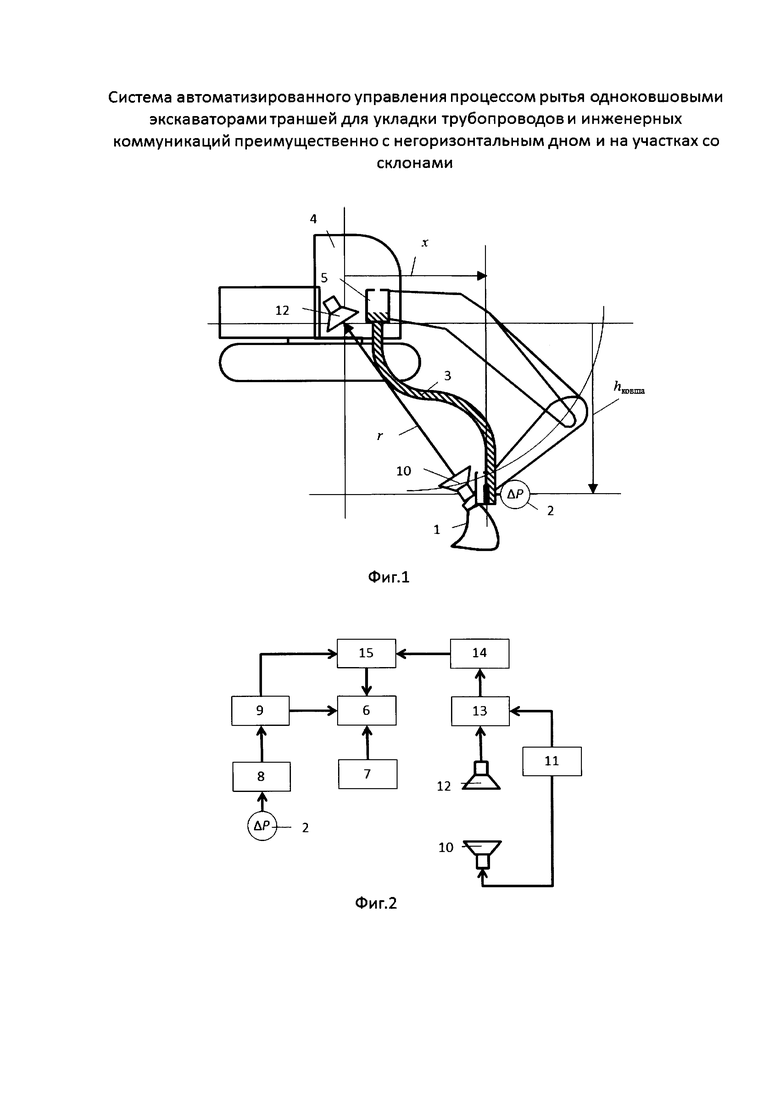
Сущность изобретения поясняется чертежами, где на фиг. 1 представлен общий вид системы автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций, на фиг. 2 - блок-схема системы.
Предлагаемая система содержит электронно-гидростатический глубиномер, который имеет установленный на ковше 1 экскаватора (в верхней части ковша) электростатический датчик перепада давления 2, гидравлически связанный с помощью шланга 3 с расположенной на кабине машиниста экскаватора 4 вдоль оси ее вращения открытой заполненной жидкостью емкостью 5 (фиг. 1), индикатор глубины ковша 6 и задатчик глубины копания 7 (фиг. 2), также размещенные в кабине машиниста экскаватора 4.
В состав электронно-гидростатического глубиномера введены аналого-цифровой преобразователь 8 (фиг. 2) сигналов электростатического датчика перепада давления 2 в цифровой код и цифровой вычислитель глубины 9, через которые электростатический датчик перепада давления 2 последовательно связан с индикатором глубины ковша 6 таким образом, что вход аналого-цифрового преобразователя 8 соединен с выходом электростатического датчика перепада давления 2, а его выход - с входом цифрового вычислителя глубины 9. Выход цифрового вычислителя глубины 9 соединен с индикатором глубины ковша 6.
Система оснащена ультразвуковым измерителем радиального расстояния от кабины машиниста экскаватора 4 до ковша, который состоит из установленного на ковше 1 экскаватора (в верхней его части) в непосредственной близости к электростатическому датчику перепада давления 2 излучателя ультразвуковых импульсных сигналов 10, задающего импульсного генератора 11, выход которого соединен с излучателем ультразвуковых импульсных сигналов 10. Кроме того, в состав ультразвукового измерителя радиального расстояния входит установленный на кабине машиниста экскаватора 4 приемник ультразвуковых импульсных сигналов 12, измеритель времени запаздывания 13 появления на входе приемника ультразвуковых импульсных сигналов 12 первого сигнала от излучателя ультразвуковых импульсных сигналов 10 и цифровой вычислитель радиального расстояния до ковша 14. Причем один вход измерителя времени запаздывания импульсных сигналов 13 соединен с выходом приемника ультразвуковых импульсных сигналов 12, другой его вход связан с выходом задающего импульсного генератора 11, а выход - со входом цифрового вычислителя радиального расстояния 14 (фиг. 2).
В состав системы введен цифровой вычислитель горизонтального смещения 15 ковша относительно кабины экскаватора 4, один из входов которого соединен с упомянутым цифровым вычислителем радиального расстояния 14, другой его вход соединен с выходом цифрового вычислителя глубины 9, а его выход связан с индикатором глубины ковша 6. Кроме того, к индикатору глубины ковша 6 подключен задатчик глубины копания 7 (фиг. 2).
Электростатический датчик перепада давления 2 оснащен дополнительно шлангом (на рисунке не показано), свободный конец которого закреплен в районе кабины машиниста экскаватора 4, а его полость сообщена с атмосферой.
Работа системы заключается в следующем.
При рытье траншеи ковш 1 перемещается в вертикальной плоскости, при этом меняется его глубина относительно кабины 4 экскаватора и, соответственно, высота гидростатического столба рабочей жидкости в шланге 3.
Электростатический датчик перепада давления 2 измеряет перепад давления между столбом рабочей жидкости в шланге 3, на верхнюю часть которого действует атмосферное давление, и атмосферным давлением, действующим на электростатический датчик перепада давления 2 с другой стороны. Измеряемый перепад давления пропорционален глубине ковша 1 вне зависимости от текущего значения атмосферного давления, от горизонтального расстояния ковша 1 до экскаватора и от наклона кабины экскаватора 4. Сигналы с выхода электростатического датчика перепада давления 2 поступают на вход аналого-цифрового преобразователя 8, а цифровой код с выхода этого преобразователя 8 поступает на вход цифрового вычислителя глубины 9, который, с учетом плотности рабочей жидкости, периодически рассчитывает текущую глубину ковша 1 в выбранных единицах длины для индикации ее значения машинисту экскаватора.
Глубина текущего положения ковша 1 относительно кабины экскаватора вычисляется в цифровом вычислителе глубины 9 по формуле:
hковша=ΔP/(g*ρ)-L, где: ΔР - перепад давлений; ρ - плотность рабочей жидкости в шланге 3, g - ускорение свободного падения, L - высота ковша.
При рытье траншеи ковш одновременно перемещается в вертикальной и горизонтальной плоскостях, при этом меняется его радиальное расстояние относительно кабины экскаватора, которое периодически измеряется следующим образом. На вход излучателя ультразвуковых импульсных сигналов 10 поступают сигналы от задающего импульсного генератора 11, под воздействием которых он излучает в окружающую среду короткие ультразвуковые импульсы. Приемник ультразвуковых импульсных сигналов 12 преобразует все поступающие на него прямой и отраженные ультразвуковые импульсы в электрические сигналы, которые подаются на вход измерителя времени запаздывания принятых ультразвуковых импульсных сигналов 13, где фиксируется интервал времени от момента подачи импульса задающим импульсным генератором 11 на установленный на ковше 1 излучатель 10 до момента появления первого сигнала на выходе прикрепленного к кабине экскаватора приемника ультразвуковых импульсных сигналов 12, который пропорционален текущему радиальному расстоянию до ковша 1.
Данные с выхода измерителя времени запаздывания 13 поступают в цифровой вычислитель радиального расстояния до ковша 14, в котором вычисляется кратчайшее расстояние от кабины экскаватора 4 до ковша 1, что необходимо для дальнейших геометрических вычислений горизонтального смещения ковша 1 относительно кабины экскаватора 4.
Текущее расстояние от ковша до кабины экскаватора 4 вычисляется по формуле:
r=с*Δt, где: с - скорость распространения звука в атмосферном воздухе, Δt - время запаздывания между излученными и принятыми ультразвуковыми импульсами.
Данные с выхода цифрового вычислителя радиального расстояния 14 и с выхода цифрового вычислителя глубины 9 поступают на входы цифрового вычислителя горизонтального смещения ковша 15. По двум измеренным координатам положения ковша относительно кабины экскаватора - глубине и радиальному расстоянию - в цифровом вычислителе горизонтального смещения ковша 15 периодически рассчитывается текущее расстояние от ковша 1 до кабины экскаватора 4 в горизонтальной плоскости.
Текущее горизонтальное смещение ковша относительно кабины экскаватора 4 вычисляется по формуле  .
.
Эти значения выводятся на индикатор глубины ковша 6. Одновременно из задатчика глубины копания 7 в индикатор глубины ковша 6 поступают данные о требуемом профиле траншеи. Машинист экскаватора ведет разработку траншеи, добиваясь совпадения фактической глубины ковша 1 с проектной глубиной траншеи. При этом у него нет необходимости привлекать дополнительный персонал для контроля глубины копания, который для выполнения этой операции должен находиться на дне траншеи в непосредственной близости от движущихся рабочих органов экскаватора, машинист также может вести разработку траншеи в условиях ограниченной видимости, что в совокупности выгодно отличает предлагаемую систему автоматизации управления процессом рытья траншей одноковшовыми экскаваторами от прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения глубины копания одноковшовым экскаватором | 1983 |
|
SU1139965A1 |
| Система для определения глубины копания одноковшовым экскаватором | 1987 |
|
SU1476082A1 |
| Устройство для поддержания заданной глубины копания одноковшовым экскаватором с поворотной платформой | 1982 |
|
SU1076539A1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Датчик глубины копания землеройной машины непрерывного действия | 1978 |
|
SU740903A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Одноковшовый экскаватор | 1974 |
|
SU781268A1 |
| Устройство для измерения глубиныКОпАНия ОдНОКОВшОВыМ эКСКАВАТОРОМ | 1976 |
|
SU806824A2 |
| СИСТЕМА УПРАВЛЕНИЯ РУКОЯТЬЮ ЭКСКАВАТОРА | 2015 |
|
RU2681800C2 |
Изобретение относится к области строительной техники. В частности, предложена система автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций преимущественно с негоризонтальным дном и на участках со склонами, содержащая электронно-гидростатический глубиномер, имеющий установленный на ковше экскаватора гидравлически соединенный с открытой и заполненной жидкостью емкостью, расположенной на кабине машиниста экскаватора вдоль ее оси вращения, электростатический датчик перепада давления, индикатор глубины ковша, электрически связанный с электростатическим датчиком перепада давления, и задатчик глубины копания, по изобретению связь электростатического датчика перепада давления с индикатором глубины ковша осуществлена через введенные в состав электронно-гидростатического глубиномера и установленные между ними аналого-цифровой преобразователь сигналов электростатического датчика перепада давления в цифровой код, вход которого соединен с упомянутым электростатическим датчиком, и цифровой вычислитель глубины ковша, вход которого соединен с выходом аналого-цифрового преобразователя, а выход соединен с индикатором глубины ковша. Система оснащена ультразвуковым измерителем радиального расстояния от кабины экскаватора до ковша, состоящим из размещенного на ковше в непосредственной близости от датчика перепада давления излучателя ультразвуковых импульсных сигналов, задающего импульсного генератора, связанного с упомянутым излучателем импульсных сигналов, приемника ультразвуковых импульсных сигналов, расположенного на кабине машиниста экскаватора, измерителя времени запаздывания принятых ультразвуковых сигналов, один из входов которого соединен с приемником ультразвуковых импульсных сигналов, а другой его вход соединен с другим выходом задающего импульсного генератора, цифрового вычислителя радиального расстояния до ковша, вход которого соединен с выходом упомянутого измерителя времени запаздывания. В систему также введен цифровой вычислитель горизонтального смещения ковша относительно кабины экскаватора, один из входов которого соединен с цифровым вычислителем радиального расстояния до ковша, другой его вход соединен с выходом цифрового вычислителя глубины. Выход указанного цифрового вычислителя горизонтального смещения связан с индикатором глубины ковша, который подключен к задатчику глубины копания. 1 з.п. ф-лы, 2 ил.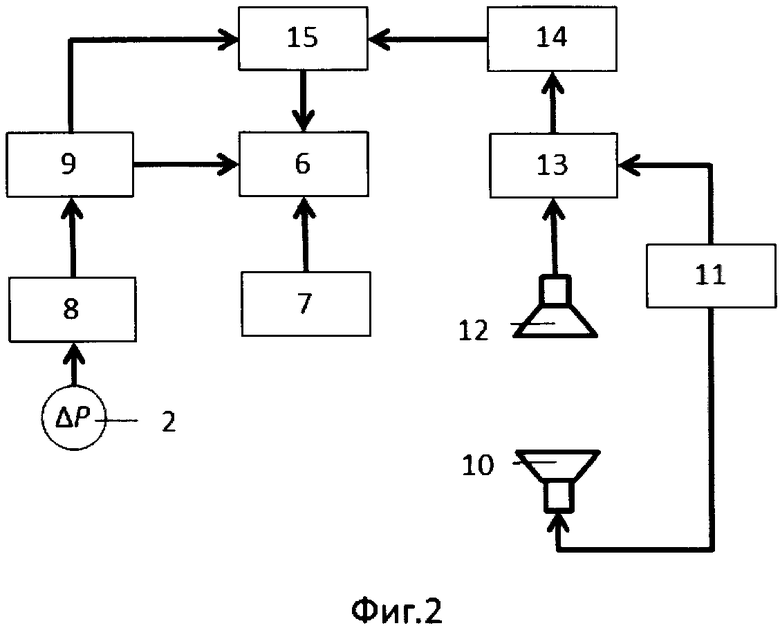
1. Система автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей для укладки трубопроводов и инженерных коммуникаций преимущественно с негоризонтальным дном и на участках со склонами, содержащая электронно-гидростатический глубиномер, имеющий установленный на ковше экскаватора гидравлически соединенный с открытой и заполненной жидкостью емкостью, расположенной на кабине машиниста экскаватора вдоль ее оси вращения, электростатический датчик перепада давления, индикатор глубины ковша, электрически связанный с электростатическим датчиком перепада давления, и задатчик глубины копания, отличающаяся тем, что связь электростатического датчика перепада давления с индикатором глубины ковша осуществлена через введенные в состав электронно-гидростатического глубиномера и установленные между ними аналого-цифровой преобразователь сигналов электростатического датчика перепада давления в цифровой код, вход которого соединен с упомянутым электростатическим датчиком, и цифровой вычислитель глубины, вход которого соединен с выходом аналого-цифрового преобразователя, а выход соединен с индикатором глубины ковша, при этом система оснащена ультразвуковым измерителем радиального расстояния от кабины экскаватора до ковша, состоящим из размещенного на ковше в непосредственной близости от электростатического датчика перепада давления излучателя ультразвуковых импульсных сигналов, задающего импульсного генератора, связанного с упомянутым излучателем импульсных сигналов, приемника ультразвуковых импульсных сигналов, расположенного на кабине машиниста экскаватора, измерителя времени запаздывания принятых ультразвуковых сигналов, один из входов которого соединен с приемником ультразвуковых импульсных сигналов, а другой его вход соединен с другим выходом задающего импульсного генератора, цифрового вычислителя радиального расстояния до ковша, вход которого соединен с выходом упомянутого измерителя времени запаздывания, в систему также введен цифровой вычислитель горизонтального смещения ковша относительно кабины экскаватора, один из входов которого соединен с цифровым вычислителем радиального расстояния до ковша, другой его вход соединен с выходом цифрового вычислителя глубины, а его выход связан с индикатором глубины ковша, подключенным к задатчику глубины копания.
2. Система автоматизированного управления процессом рытья одноковшовыми экскаваторами траншей по п. 1, отличающаяся тем, что электростатический датчик перепада давления оснащен дополнительным шлангом, свободный конец которого закреплен в районе кабины экскаватора, его полость сообщается с атмосферой.
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1985 |
|
SU1258958A1 |
| Система для определения глубины копания одноковшовым экскаватором | 1987 |
|
SU1476082A1 |
| Одноковшовый экскаватор | 1974 |
|
SU781268A1 |
| Устройство для автоматического регулирования положения ковша гидравлического экскаватора | 1988 |
|
SU1587149A1 |
| Устройство для скважинной разработки ископаемых | 1939 |
|
SU62125A1 |
| US 6263595 B1, 24.07.2001. | |||

