00
ф со сь
ел
Изобретение относится к одноковшовым экскаваторам, а именно к устройств4м для измерения глубины копания с целью вьщерживания заданного уклона, например, дна траншеи.
Известно устройство для определения глубины копания, включающее датчик наклона стрелы экскаватора C13.
Однако данное устройство не учитьшает изменение уклонов по трассе работы экскаватора.
Наиболее близким техническим решением к изобретению является устройство для измерения глубины копания одноковшовым экскаватором, включающее сумматор и датчики пройденного пути и положения стрелы 2.
Наличие электронной системы усложняет систему измерений.
Цель изобретения - повышение точности измерения глубинц копания и качества работ.
Указанная цель достигается тем, что устройство для определения глубины копания одноковшовым экскавато ром, включающее сумматор и датчик глубины копания с индикатором, снабжено датчиком пройденного пути, а сумматор выполнен из арифмометра и из соленоида, сердечник которого связан посредством зубчато-реечной передачи с валом арифмометра.
При .этом датчик пройденного пути выполнен из катушки с канатом и имеет контакт, электрически соединенны с соленоидом и установленный с возможностью периодического замыкания катушкой.
Причем датчик глубины копания с индикатором выполнен из рулетки с лентой, проградуированной в единицах заглубления ковша, при этом устройство снабжено кинематически связанным с рулеткой зубчатым сектором для установки на стреле.
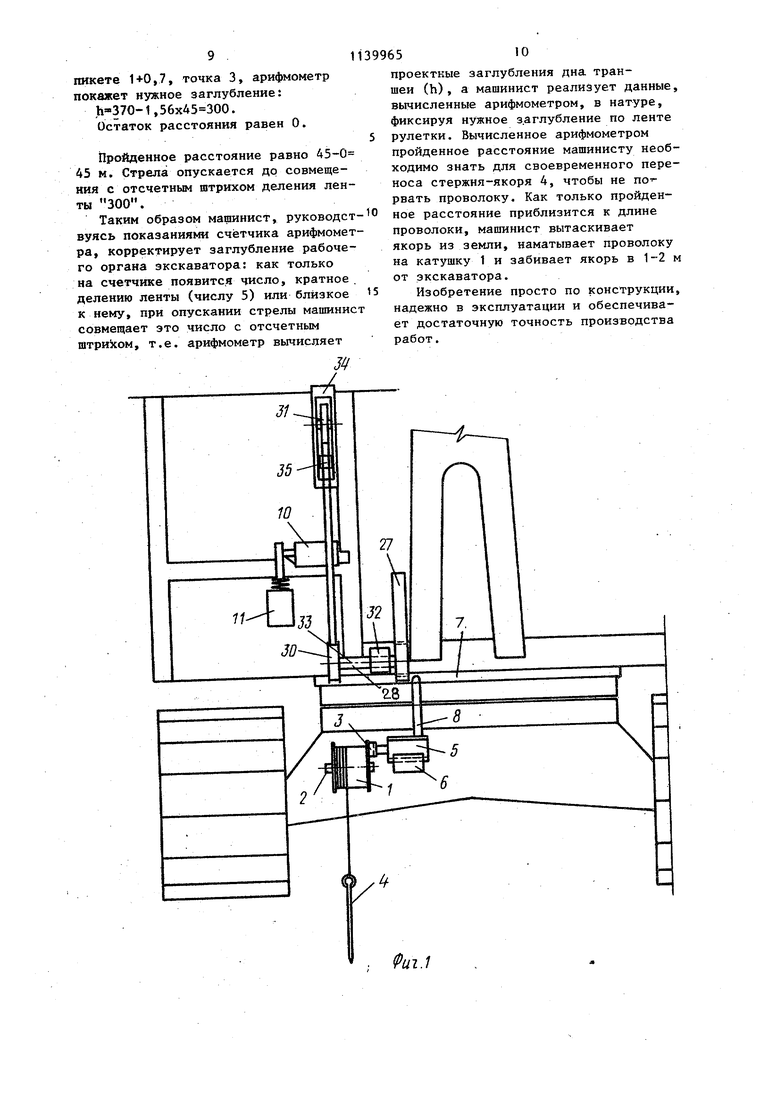
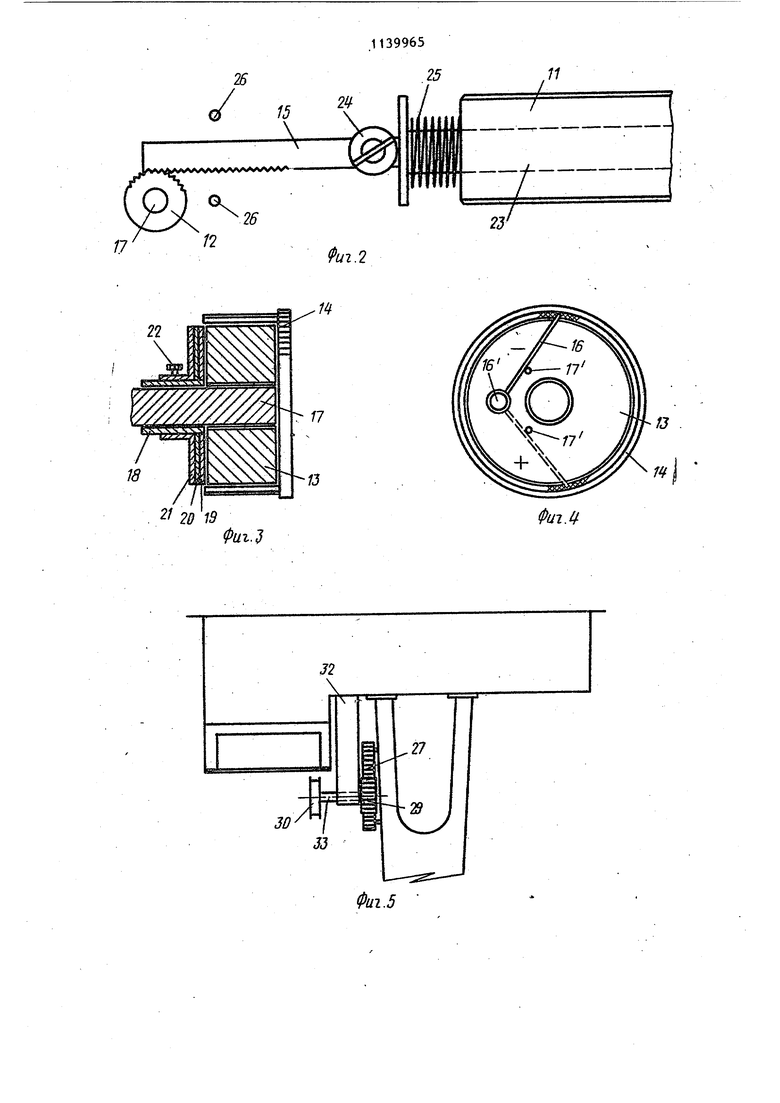
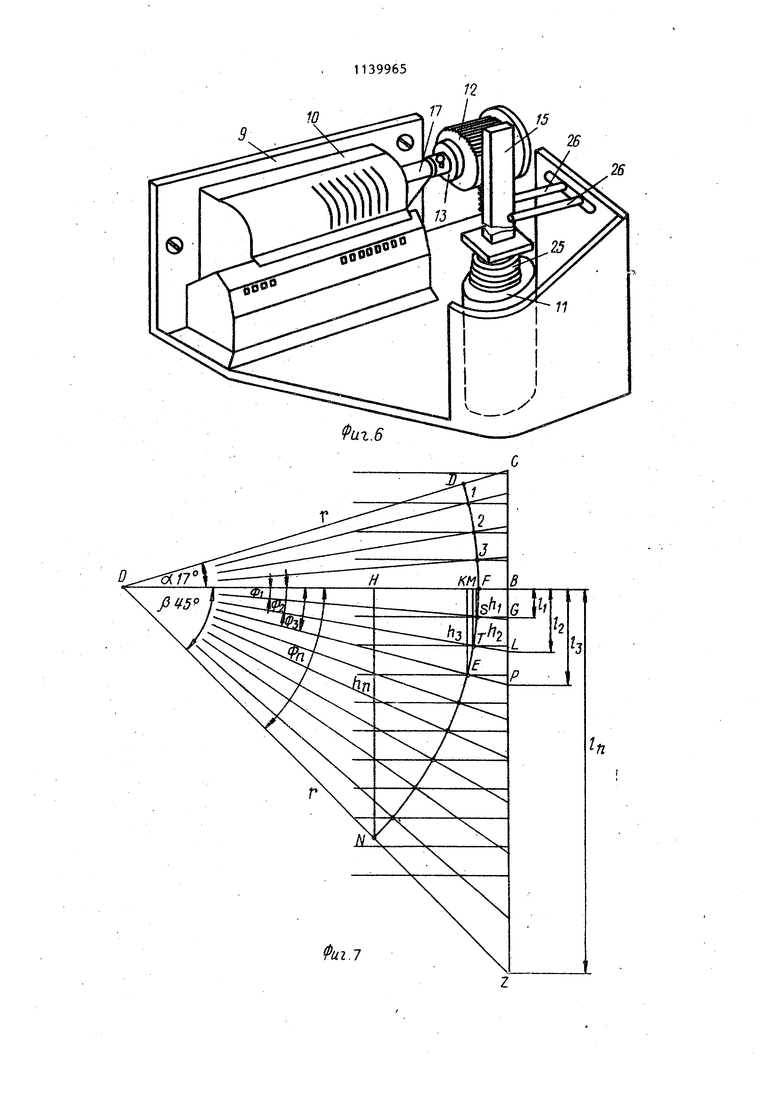
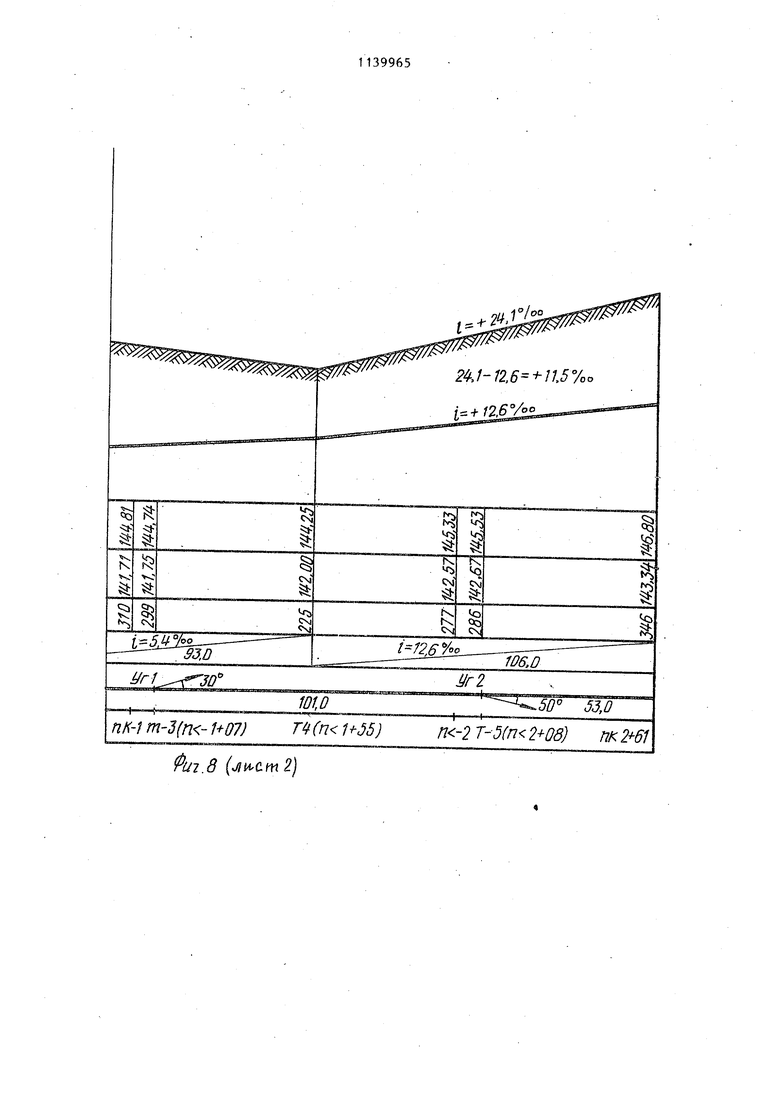
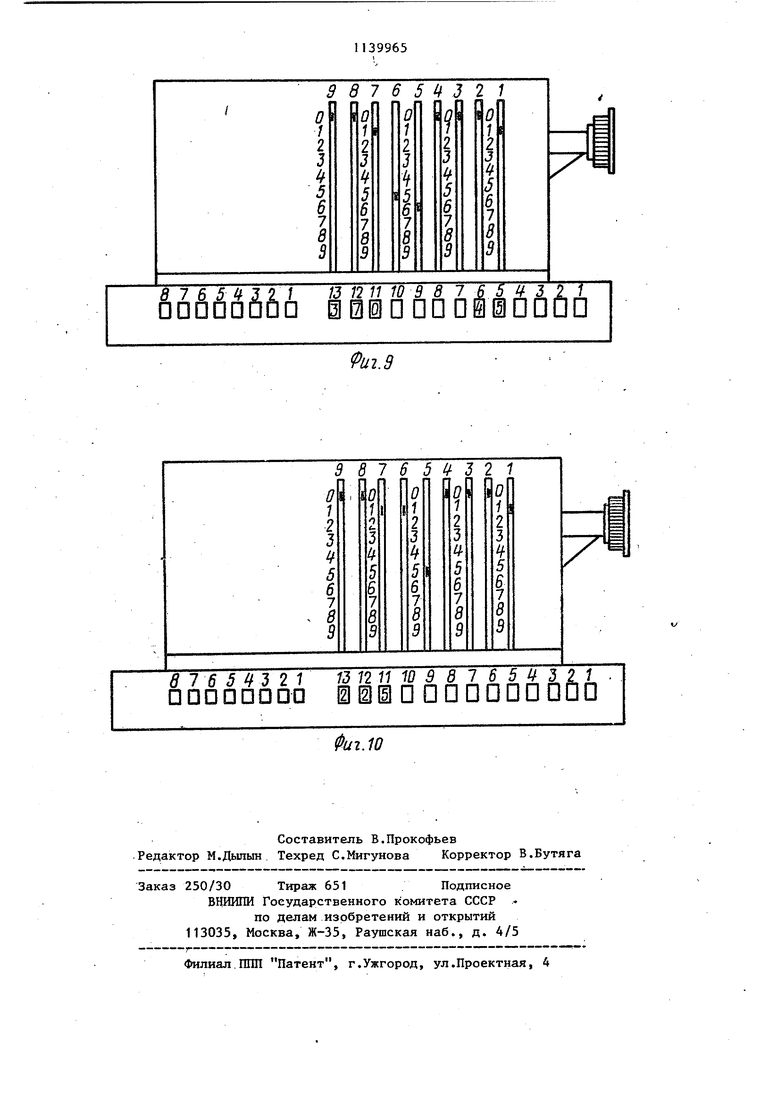
На фиг. 1 изображено устройство, смонтированное на экскаваторе, вид спереди; на фиг. 2 - зубчато-реечна передача с соленоидом, вид со стороны приводной шестерни вала арифмометра; на фиг. 3 и 4 - механизм передачи вращения к валу арифмометра; на фиг. 5 - зубчатый сектор, вид сверху при опущенной стреле; на фиг. 6 - арифмометр с приводом ния вала , вид в аксонометрии , на фиг. 7 - график разметки ленты рулетки; на фиг. 8 - продольный профиль трассы; на фиг. 9 и. 10 - панель арифмометра.
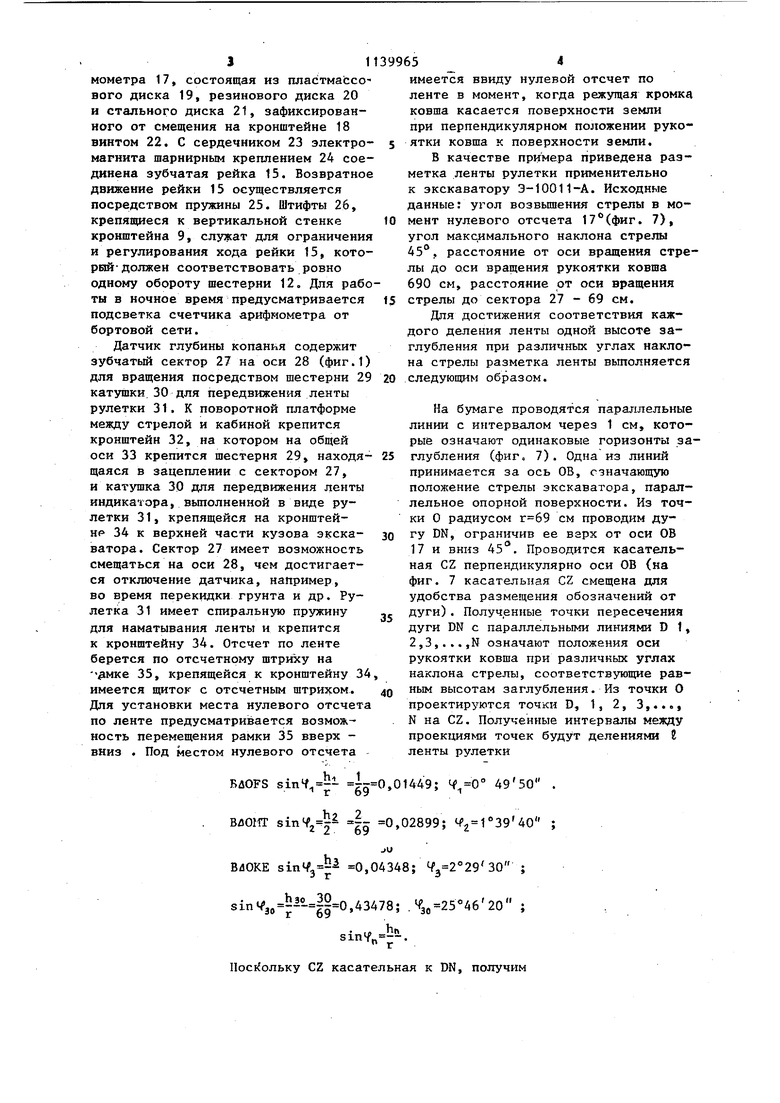
К корпусу хода экскаватора крепится датчик глубины копания, содержащий катушку 1 на осях 2. Диск катушки 1 с наружной стороны имеет радиальный выступ 3 клинообразного сечения. На катушку 1, длина окружности которой 1 м, наматывается в один ряд канат с якорем 4. Длина каната 50-60 м. К корпусу хода с выходом за плоскость движения радиального выступа 3 крепится кнопка 5 с замыкающим контактом и самовозвратом на кронштейне 6. К кузову экскаватора, вокруг опорно-поворотного устройства, крепится контактная кольцевая шина 7, изолированная от массы экскаватора, к которой подводится положительный полюс бортовой сети. Один контакт кнопки 5 соединен с контактной шиной 7 пластинчатой пружиной 8, второй - с массой экскаватора.Перед смотровым стеклом на кронштейне 9 устанавливается арифмометр 10 с соленоидом 11. Шестерня 12 (фиг. 3 и 4) состоит из цилиндра 13 и зубчатого венца 14, имеющего, на внешней поверхности зубчатую нарезку для сцепления с зубчатой рейкой 15, а на внутренней поверхности части венца, выступающей за цилиндр 13, - нарезку для пластины - реверса 16. Рейка 15 находится в зацеплении непосредственно с венцом 14, образующим в совокупности с цилиндром 13 шестерню 12. Такое устройство шестерни 12 обеспечивает с помощью реверса 16 преобразование возвратно-поступательного движения рейки 15 во вращательное движение главного вала арифмометра.Цилиндр 13 служит для передачи вращения от венца 14 на ось привода главного вала арифмометра. Пластина-реверс 16 служит для пеЬисдического блокирования и разблокирования цилиндра 13 и венца 14, для изменения направления вращения вала арифмометра 17 и для обеспечения действий Сложение и Вычитание. Для предотвращения возможности проворачивания вала 17 арифмометра при вращении венца 14 на цилиндре 13 в момент их разблокирования, т.е.,когда реверс скользит на нарезке венца 14, служит муфта постоянного торможения, крепящаяся на кронштейне 18 привода вала арифмометра 17, состоящая из пластмассо вого диска 19, резинового диска 20 и стального диска 21, зафиксированного от смещения на кронштейне 18 винтом 22. С сердечником 23 электро магнита шарнирным креплением 24 сое динена зубчатая рейка 15. Возвратно движение рейки 15 осзпцествляется посредством пружины 25. Штифты 26, крепящиеся к вертикальной стенке кронштейна 9, слууат для ограничения и регулирования хода рейки 15, кото рей- должен соответствовать ровно одному обороту шестерни 12. Для рабо ты в ночное время предусматривается подсветка счетчика арифном:етра от бортовой сети. Датчик глубины копанья содержит зубчатый сектор 27 на оси 28 (фиг.1) для вращения посредством шестерни 29 катушки 30 для передвижения ленты рулетки 31. К поворотной платформе между стрелой и кабиной крепится кронштейн 32, на котором на общей оси 33 крепится шестерня 29, находящаяся в зацеплении с сектором 27, и катушка 30 для передвижения ленты индикатора, выполненной в виде рулетки 31, крепящейся на кронштейнр 34 к верхней части кузова экскаватора. Сектор 27 имеет возможность смещаться на оси 28, чем достигается отключение датчика, например, во время перекидки грунта и др. Рулетка 31 имеет спиральную пружину для наматывания ленты и крепится к кронштейну 34. Отсчет по ленте берется по отсчетному штриху на дмке 35, крепящейся к кронштейну 34 имеется щиток с отсчетным штрихом. Для установки места нулевого отсчета по ленте предусматривается возможность перемещения рамки 35 вверх вниз . Под местом нулевого отсчета BdOFS - ЪйОт |Q
БЛОКЕ sinifj - 0,04348; Чз 22930 ;
81пЧз„ Ь1Щ 0,43478; .%„ 25 4620 ; sinV.
Пос1 ольку CZ касательная к DN, получим имеется ввиду нулевой отсчет по ленте в момент, когда режущая кромка ковша касается поверхности земпи при перпендикулярном положении рукоятки ковша к поверхности земли. В качестве примера приведена разметка ленты рулетки применительно к экскаватору Э-10011-А. Исходные данные: угол возвьш1ения стрелы в момент нулевого отсчета 17(фиг. 7), угол максимального наклона стрелы 45, расстояние от оси вращения стрелы до оси вращения рукоятки ковша 690 см, расстояние от оси вращения стрелы до сектора 27 - 69 см. Для достижения соответствия каждого деления ленты одной высоте заглубления при различных углах наклона стрелы разметка ленты вьтолняется следующим образом. На бумаге проводятся параллельные линии с интервалом через 1 см, которые означают одинаковые горизонты заглубления (фиг. 7). Одна из линий принимается за ось ОБ, означающую положение стрелы экскаватора, параллельное опорной поверхности. Из точки О радиусом см проводим дугу DN, ограничив ее Bspx от оси ОБ 17 и вниз 45. Проводится касательная CZ перпендикулярно оси ОБ (на фиг. 7 касательная CZ смещена для удобства размещения обозначений от дуги). Полученные точки пересечения дуги DN с параллельными линиями D 1, 2,3,...,N означают положения оси рукоятки ковша при различных углах наклона стрелы, соответствующие равным высотам заглубления. Из точки О проектируются точки D, 1, 2, 3,..., N на CZ. Полученные интервалы между проекциями точек будут делениями 2 ленты рулетки 449; G° 4950 . 2899; Ч2 Г3940 ;
511399656
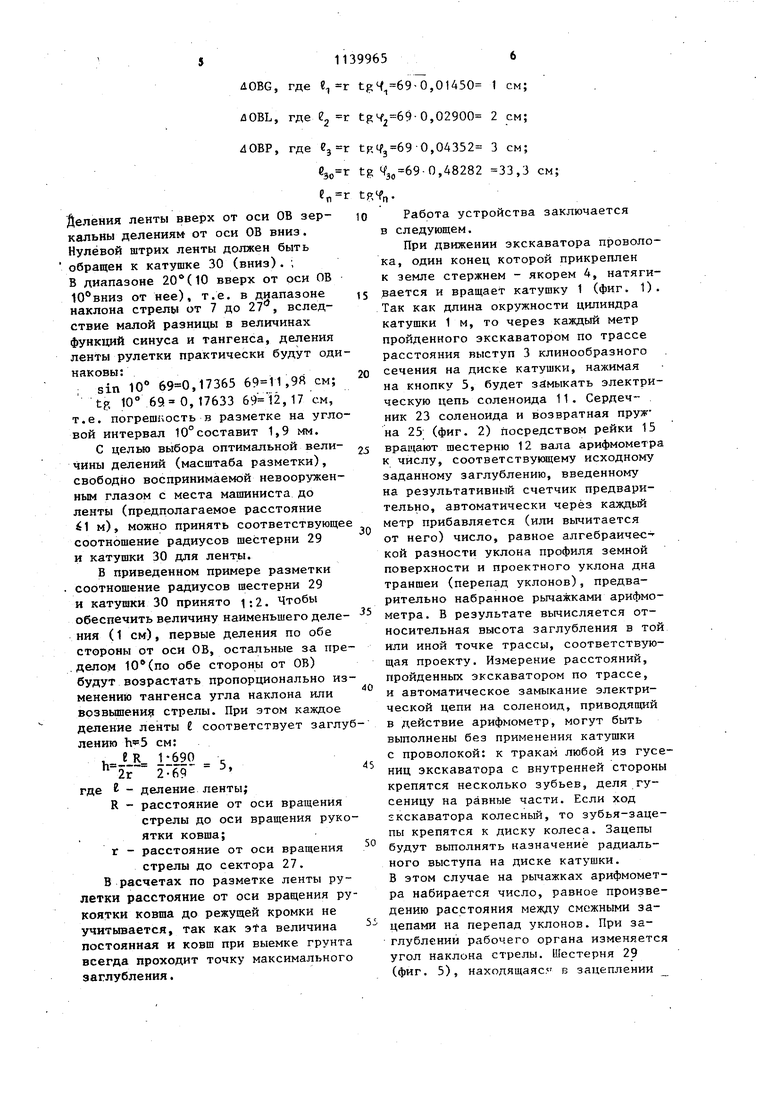
ДОВС, где е г tg4, 69-0,01450 1 см;
/SOBL, где е г ,02900
4ОВР, где е Сз,
(еления ленты вверх от оси ОБ зеркальны делениям от оси ОВ вниз. Нулевой штрих ленты должен быть обращен к катушке 30 (вниз). ; В диапазоне 20(10 вверх от оси ОВ от нее), т.е. в диапазоне наклона стрелы от 7 до 27, вследствие малой разницы в величинах функций синуса и тангенса, деления ленты рулетки практически будут одинаковы:
; sin 10- ,17365 ,98 см; tp 10° 69 О, 17633 ,17 см, т.е. погрешность в разметке на угловой интервал 10°составит 1,9 мм.
С целью выбора оптимальной величины делений (масштаба разметки), свободно воспринимаемой невооруженным глазом с места машиниста до ленты (предполагаемое расстояние 1 м), можно принять соответствующе соотношение радиусов шестерни 29 и катушки 30 для ленты.
В приведенном примере разметки соотношение радиусов шестерни 29 и катушки 30 принято 1:2. Чтобы обеспечить величину наименьшего деления (1 см), первые деления по обе стороны от оси ОВ, остальные за пре, делом 10(по обе стороны от ОВ) будут возрастать пропорционально изменению тангенса угла наклона или возвьшени стрелы. При этом каждое деление ленты С соответствует заглулению ЬрЗ см:
, е R 1-690
2г где К - деление ленты;
R - расстояние от оси вращения стрелы до оси вращения рукоятки ковша;
г - расстояние от оси вращения стрелы до сектора 27.
В расчетах по разметке ленты рулетки расстояние от оси вращения рукоятки ковша до режущей кромки не учитывается, так как 3ta величина постоянная и ковш при выемке грунта всегда проходит точку максимального заглубления.
2 см:
,04352 3 см;
tg %,69-0,48282 33,3 см;
.
0 Работа устройства заключается в следующем.
При движении экскаватора проволока, один конец которой прикреплен к земле стержнем - якорем 4, натяги5 дается и вращает катушку 1 (фиг. 1). Так как длина окружности цилиндра катушки 1 м, то через каждый метр пройденного экскаватором по трассе расстояния выступ 3 клинообразного
0 сечения на диске катушки, нажимая на кнопку 5, будет замыкать электрическую цепь соленоида 11. Сердечник 23 соленоида и возвратная пруж на 25 (фиг. 2) посредством рейки 15
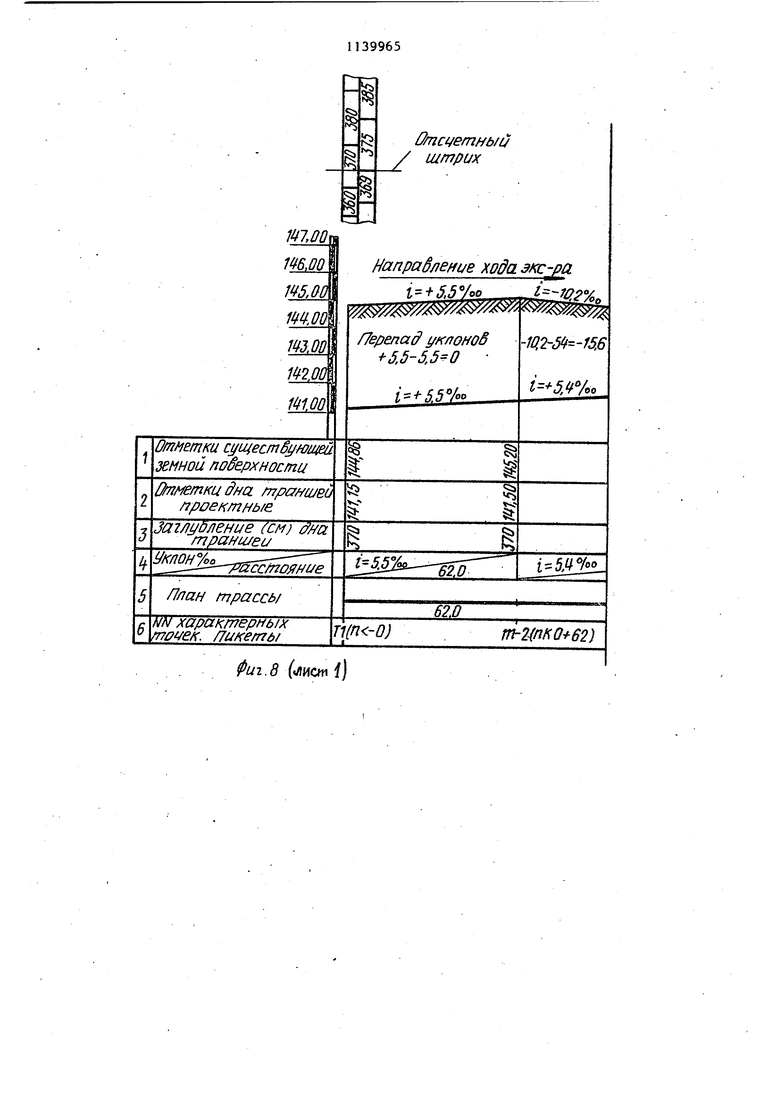
вра1чают шестерню 12 вала арифмометра к числу, соответствукяцему исходному заданному заглублению, введенному на результативный счетчик предварительно, автоматически через каждый метр прибавляется (или вычитается от него) число, равное алгебраичес кой разности уклона профиля земной поверхности и проектного уклона дна траншеи (перепад уклонов), предварительно набранное рычажками арифмометра. В результате вычисляется относительная высота заглубления в той или иной точке трассы, соответствующая проекту. Измерение расстояний, пройденных экскаватором по трассе, и автоматическое замыкание электрической цепи на соленоид, приводящий в действие арифмометр, могут быть выполнены без применения катушки с проволокой: к тракам любой из гусениц экскаватора с внутренней стороны крепятся несколько зубьев, деля гусеницу на равные части. Если ход экскаватора колесный, то зубья-зацепы крепятся к диску колеса. Зацепы будут выполнять назначение радиального выступа на диске катушки. В этом случае на рычажках арифмометра набирается число, равное произведению расстояния между смежными за цепами на перепад уклонов. При заглублении рабочего органа изменяется угол наклона стрелы. Шестерня 29 (фиг. 5), находящаяся в зацеплении с сектором 27, вращаясь, вращает кр пящуюся на одной с ней оси катушку 30, на которой закреплен конец ленты рулетки 31. На катушке перема тывается с рулетки 31 часть ленты соответственно заглублению ковша. Точность работы непосредственно зависит от качества планировки трассы поэтом до начала работ по рытью тра шеи трасса должна быть спланирована и разбита с закреплением в натуре то чек изменения направления трассы в плановом и высотном отношении и характерных точек изменения рельефа земной поверхности. Все обозначения точки нивелируются геометрическим методом и на основе данных нивелирования составляется т.родольный 11рофиль существующей земной поверхности, на которой согласно данным проекта наносится продольный профиль днатраншеи (фиг. 8). Для всех интер валов трассы, имеющих разные уклоны рельефа при одинаковых заданных укло нах профиля дна траншеи, разные укло ны дна траншеи при одинаковых уклонах рельефа, разные и уклон рельефа и уклон профиля дна траншеи, вычисляется перепад уклонов, т.е. алгебраическая разность уклона земной поверхности и проектного уклона дна траншеи. При этом подъем (по ходу экскаватора) принимается Со знаком +, уклон - со знаком -. Когда профиль дна траншеи и земной поверхности совпадают, то машинист находит в продольном профиле (фиг. 8, графа 3) проектное заглубление на точке Т () и копает до момента когда с отсчетным штрихом рамки 35 совместится деление ленты рулетки 370, и на протяжении всего интервала до точки 2 придерживается этого деления, т.е., копирует профиль земной поверхности, который параллелен профилю дна траншеи по условию. При наличии уклонов земной поверхности, выкопав траншею до точки 2 (фиг. 8), машинист забивает стержень-якорь 4 вблизи экскаватора (1-2 м), в 0,6 - 0,7 м от края траншеи, чтобы проволока не провисла в траншею. Затем, ослабив гайку шарнирного соединения 24, разблокирует рейку 15 от шестерни 12, подняв ее передний конец} ослабив гайку пласти ньг-реверса 16 и сдвигая его вдоль осн на себя, выводит из зацепления внутренней нарезкой венец 14 и ставит в положение Вычитание ; набирает рачажками арифмометра 9, 8, 7 (фиг. 9) число 370 (высота заглубления в точке 2, Фиг. 8), а рычажками 2 и 1 набирает число 45 (расстояние от точки 2 до точки 3). Вводит оба на результативный счетчик и возвращает рычажки 9, 8, 7, 2, 1 в положение О. Не передвигая каретки арифмометра, рычажками 7, 6, 5 набирает число 15,6 - величина перепада уклонов (мм) в интервале точка 2-4, а рычажок 1 ставит на число 1 (фиг. 9). Вводит рейку 15 в зацепление с шестерней 12, закрепляет гайку шарнирного соединения. Через кахздый метр пройденного пути экскаватором расстояния из числа 370 вычитается 1,56 см, а отложенное на результативный счетчик расстояние 45 м (против рычажков 1. и 2, фиг. 9) уменьшается на 1 м. На пикете 0+65, в трех метрах от точки 2, счетчик арифмометра покажет вычисленное проектное заглубление дна траншеи: где Ь„ - заглубление дна траншеи в исходной точке 2 согласно продольному профилю;перепад уклонов для данного интервала трассы; расстояние пройденное от исходной точки. Подставив числовое значение величин, получим h 370-1, (число берется из.первых трех цифр с округлением до сантиметра). На счетчике против рычажков 1 и 2 будет остаток расстояния до точки 3, равной м. Так как значение каждого деления ленты рулетки соответствует 5 см заглубления ковша и оцифровка кратна 5, то машинист опускает стрелу до совмещения с отсчетным штрихом деления 365, а не 370. На пикете 0+66 вычисленное заглубление дна траншеи (соответвующее проекту) h 370-1, см. При опускании стрелы с отсчетым штрихом совмещается деление 365, ближайшее к числу 364. На пикете 1+0,7, точка 3, арифмометр покажет нужное заглубление: h 370-1,56x45 300. Остаток расстояния равен 0. Пройденное расстояние равно 45-0 45 м. Стрела опускается до совмещения с отсчетным штрихом деления ленты 300. Таким образом машинист, руководст вуясь показаниями счётчика арифмомет ра, корректирует заглубление рабочего органа экскаватора: как только на счетчике появитс.я число, кратное делению ленты (числу 5) или близкое к нему, при опускании стрелы машинис совмещает это число с отсчетным штрихом, т.е. арифмометр вычисляет 6510 проектные заглубления дна траншеи (h), а машинист реализует данные, вычисленные арифмометром, в натуре, фиксируя нужное заглубление по ленте рулетки. Вычисленное арифмометром пройденное расстояние машинисту необходимо знать для своевременного переноса стержня-якоря 4, чтобы не по рвать проволоку. Как только пройден u.u ..t.vD jjivjivjr . iuJlt)K.O пройде ное расстояние приблизится к длине проволоки, машинист вытаскивает якорь из земли, наматывает проволоку на катушку 1 и забивает якорь в 1-2 м от экскаватора. Изобретение просто по конструкции, надежно в эксплуатации и обеспечивает достаточную точность производства работ.
.25
/7//2
2.2
7Г
т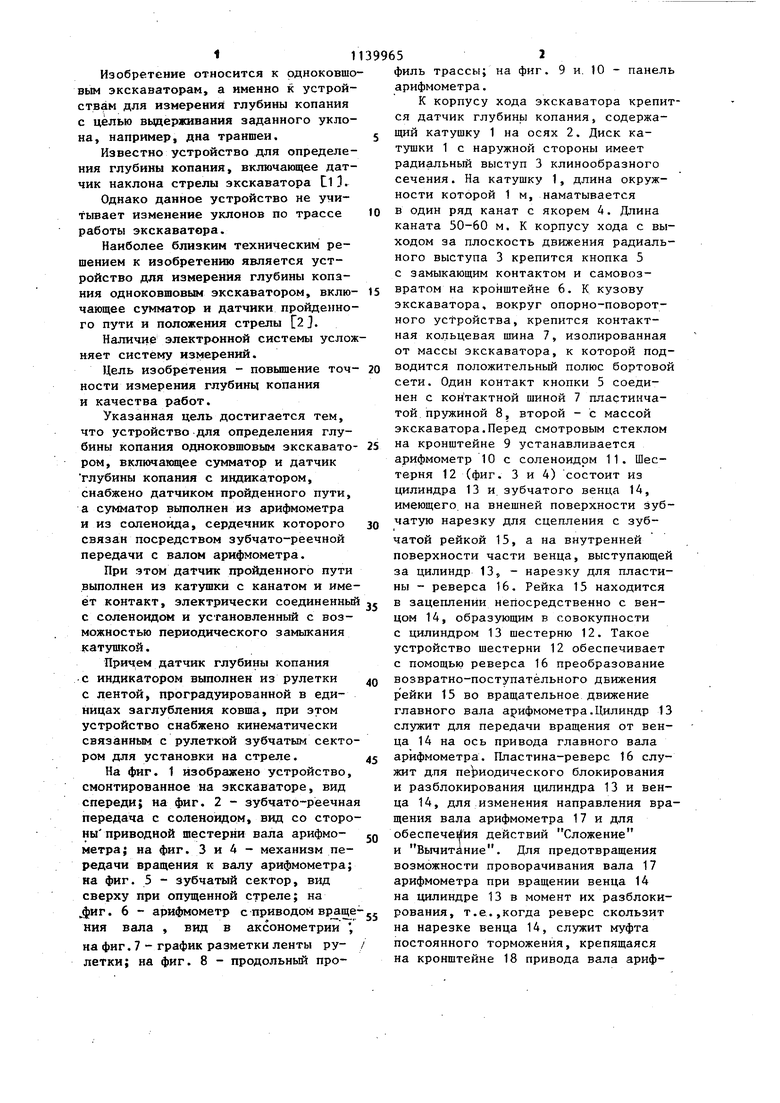
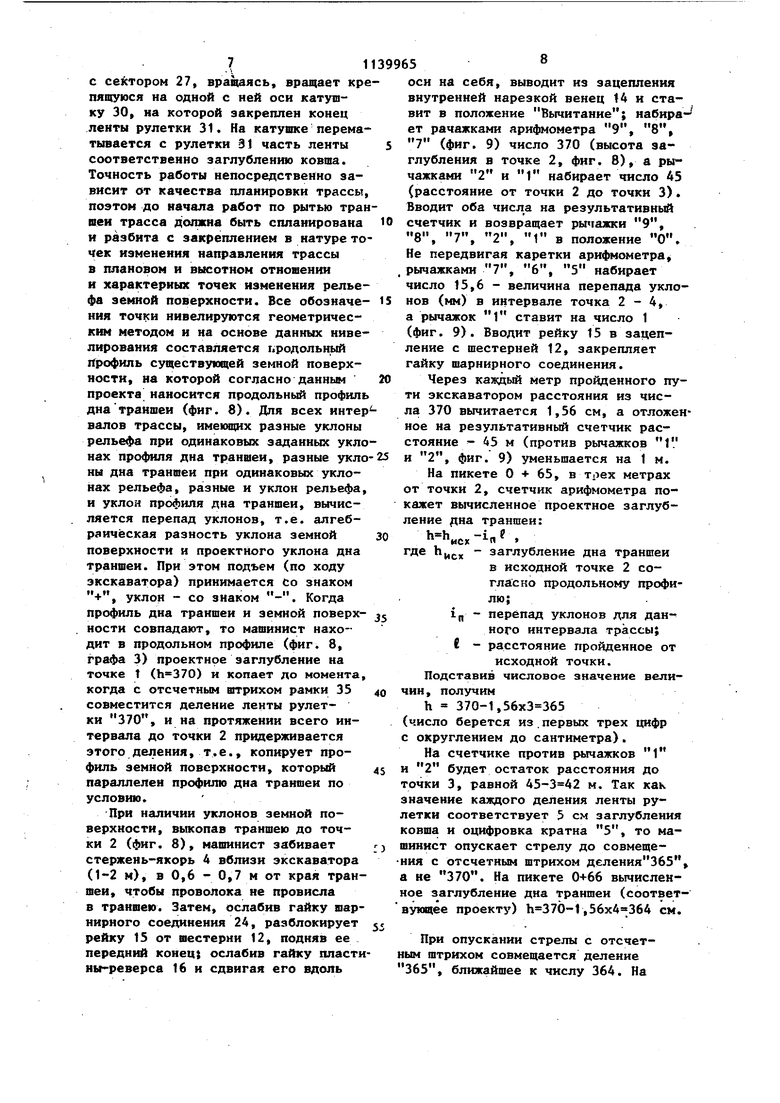
1. УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ КОПАНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРСЖ, включающее сумматор и датчик глубины копания с индика- ром, отличающееся тем, что, с целью повышения качества работ и точности измерения глубины копания, оно снабжено датчиком пройденного пути, а сумматор вьтолнен из . 13 f -Aii::;. ::. Misj|gt Ka арифмометра и из соленоида, сердечник которого связан посредством зубчато-реечной передачи с валом арифмометра. 2.Устройство по п. 1, отличающееся тем, что датчик пройденного пути выполнен из катушки с канатом и имеет контакт, электрически соединенный с солено адом и установленный с возможностью периодического замыкания катушкой. 3.Устройство по п. 1, о т л ичающееся тем, что датчик глубины копания с индикатором выполнен из рулетки с лентой, проградуированной в единицах заглубления ковша, при этом устройство снабжено ки(Л нематически связанным с рулеткой зубчатым сектором для установки на стреле.
а /
21
17
Фиг.
Фиг Л
Фиг.5
Фиг.1
иг.8 ( f)
1 f
QO ь
VN К
N v.
vc
101,0 пМ т-3(п -1+07) П (п )
U2.8 (л1л,(т2)
К «О
g
5ь
1/г2
53,0 Т-5(п 2+06) ПК 2+61
Фи-i.W
Фиг.д
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения глубины копания одноковшовым экскаватором с рукоятью | 1981 |
|
SU994631A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 1972 |
|
SU413378A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
