(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЙ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угловых перемещений | 1986 |
|
SU1462095A2 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2289785C1 |
| СИСТЕМА ОТСЧЕТА ТОЧНОГО ВРЕМЕНИ | 1987 |
|
SU1840350A1 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП С ЭТОЙ СТРУКТУРОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344374C1 |
| Устройство бесконтактного определения вязкости образцов металлических расплавов | 2017 |
|
RU2668958C1 |
| Конденсатор переменной емкости | 1982 |
|
SU1056288A1 |
| Индуктивный абсолютный преобразователь угловых перемещений | 2021 |
|
RU2788423C2 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2442991C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2445633C1 |
| Емкостной абсолютный преобразователь угловых перемещений | 2019 |
|
RU2724150C1 |
изобретение относится к контрольно-измерительной технике и может быть .ис.пользовано щя преобразования угловыхперемещений; в частоту электрического сигнала.
Известны прямоемкостные преобразователи угловых перемещений, ротор и статор которых выполнен в виде осесимметричных, одинаковых по форме и площади пластин полукруглой формы, благодаря чему емкость преобразователя изменяется линейно от угла поворота ротора
Однако включение подобного рода .емкостных преобразователей в задающие LC-контуры высокочастотных автогенераторов не позволяет получить прямочастотную выходную характеристику преобразователя вследствие, нелинейной зависимости между его емкостью и частотой f автогенератора.
Наиболее близким по технической сущности к изобретению является устройство для измерения угловых пере мещений, содержащее прямочастотный емкостной датчик с соосно установленными пластинами-статора и ротора и автогенератор , в задающий контур которого включен емкостной датчик. Благодаря определенной форме (профилированию) пластин ротора обеспечивается линейная зависимость выходной частоты устройства от угла поворота ротора (в диапазоне 0-180 ) за счет соответствующего изменения площади взаимного перекрытия пластин статора и ротора емкостного датчика. При этом пластины статора датчика выполнены отличающимися по форме и
10 размерам от пластин роторй, так что при любом угловом положении пластин ротора радиус статора превышает радиус ротора. Благодаря этому их взаимная площадь «перекрытия определяет15ся формой пластин ротора. Пластины ротора выполнены несимметричными и профилированы по определенному закону в полуплоскости-0-180° 2. Недостатком устройства является
20 узкий диапазон измерений, равный
0-180 , в котором имеет место прямочастотная выходная зависимость от угла поворота ротрра,так как при полном повороте ротора, т.е. при
25 его угловых положениях в диапазоне 180-360, эта зависимость становится нелинейной вследствие несимметричного профилирования пластин ротора.
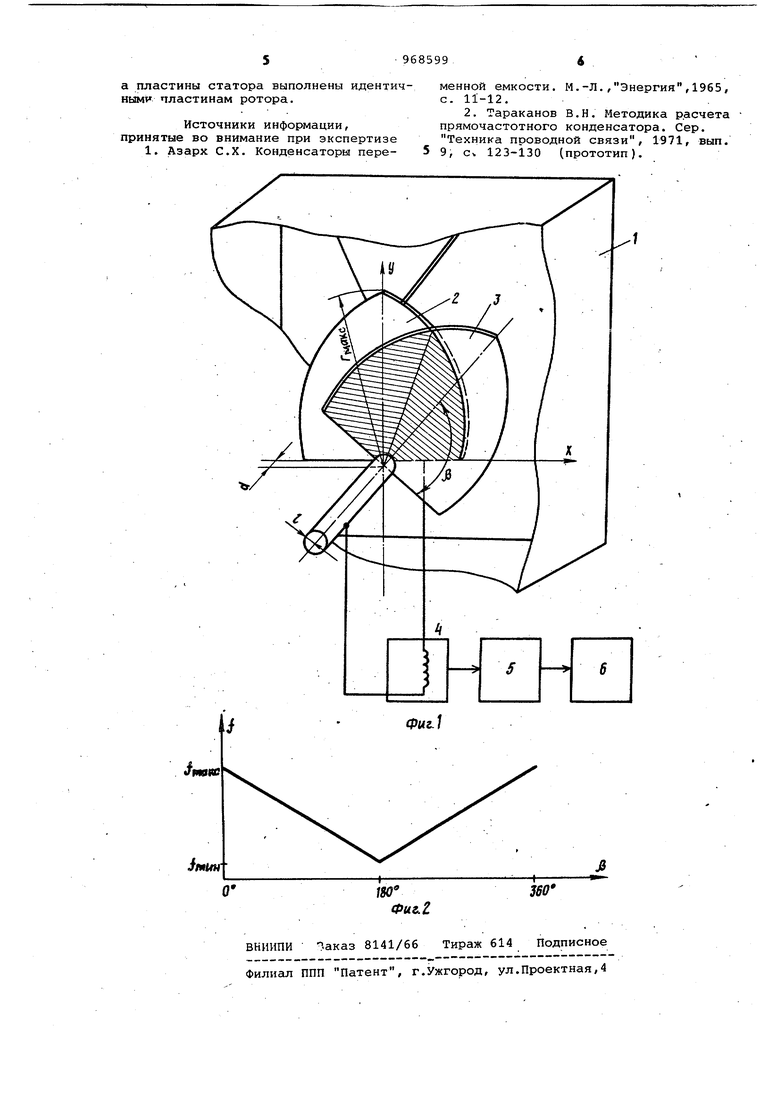
Целью изобретения является расши30рение диапазона измерений. Для достижения поставленной цели в устройстве для измерения угловых перемещений, содержащем прямочастотный емкостной датчик с соосно уста-, новленными пластинами статора и ротора и автогенератор, в задающий кон тур которого включен емкостной датчик, пластины ротора выполнены осесимметричными и имеют форму, определяемую соотношением ние радиуса плас тины; Р) - угол поворота ро тора, град; В - внутренний постоянный радиус выреза в пластинах, см; г() - текущее значение радиуса пластины .см; максимальный относительный ради ус пластины по е оси симметрии; коэффициент перекрытия по частоте мин максимальная и и минимальная час тоты автогенерато ра, соответственно. а пластины статора выполнены идентич ными пластинам ротора... На-фиг. 1 изображена принципиальная схема устройства; на фиг. 2 - вы ходная характеристика устройства. Устройство для измерения угловых перемещений содержит соосно.установленные в корпусе 1 пластины 2 статора и пластины 3 ротора (на фиг. 1 показано по одной пластине), размещенные на расстоянии с1 одна от другой , Пластины 2 и 3 статора и ротора включены в задающий контур 4, например LC-контур, автогенератор 5, к выходу которого подключен частотомер 6. Устройство работает следующим образом. В исходном (нулевом} положении устройства, когда пластины 2 и 3 ста тора и ротора не перекрывают одна другую (угол (Ъ 0) , емкость датчика минимальная, вследствие чего частота на выходе автогенератора 5 максималь ная и равна; макс- повороте ротора емкостного датчика, связываемого в процессе измерения с контролируемым объектом по часовой стрелке или против нее, увеличивается площадь перекрытия пластин 2 и 3, емкость датчика увеличивается, а частота на выходе автогенератора 5 уменьшается вплоть до f, при угле р. поворота ротора, равном 180. Линия, соответствующая углу (Ь 9о,является осью симметрии пластин 3 ротора. При дальнейшем повороте ротора площадь перекрытия пластин 2 и 3 статора и ротора вновь уменьшается,а частота на выходе автогенератора 5 линейно увеличивается ДО максТаким образом обеспечивается получение зеркально отраженных прямочастотных выходных зависимостей устройств от. угловых перемещений ротора емкостного датчика в диапазонах О 180-360°в виде треугольной периодически повторяющейся зависимости при любом направлении вращения .ротора, что расширяет диапазон измерений угловых перемещений контролируемого объекта. Формула изобретения Устройство для измерения угловыхперемещений, содержа щее прямочастотный емкостной датчик с соосно установленными пластинами статора и ротора и автогенератор, в задающий контур которого включен емкостной датчик, отлич ающееся тем, что, с Целью расширения диапазона измерений, пластины ротора выполнены осесимметричными и имеют форму,определяемую соотношением г8 -1 мдкь ге iib)() 1к .J lu 90 где rE()b)относительное текущее значение радиуса пластины; угол поворота ротора, град; - внутренний постоянный радиус выреза в пластинах,см { - текущее значение радиуса пластины с.м; макс .- максимальный относительный радиус пластины по ее ООН симметрии;коэффициент.перекрытия по частоте, .. максимальная и минимальная частоты автогенератора, соответственно.
