Изобретение относится к измерительной технике и может использоваться в технологии машиностроения для определения координат центра тяжести однородных тел сложной формы, частей тела, статических моментов масс и масс этих частей,, в частности разностепенности сечений тел вращения..
По основному авт .св. СССР № 427635 известно устройство для определения координат центра тяжести однородного тела сложной формы, например турбинной лопатки, содержащее станину, установленный на ней датчик вытсшкивающей силы, на котором размещен с возможностью перемещения в вертикальном направлении сосуд с жидкостью для погружения части испытуемого тела, зажим для крепления тела, моментомер с рычагом и связанная с ним и с датчиком выталкивающей силы система измерения 1.
Недостатком устройства является невысокая точность определения координат в связи с незначительностью приращения вытгшкивгиощей силы, особенно при большой разности плотностей испытуемого тела и жидкости.
Целью изобретения является повышение точности.
Поставленная цель достигается тем, что устройство для определения координат центра тяжести .однородного тела снабжено кривошипом,связывающим зажим с рычагом, установленным с возможностью вращения относительно своей оси.
10
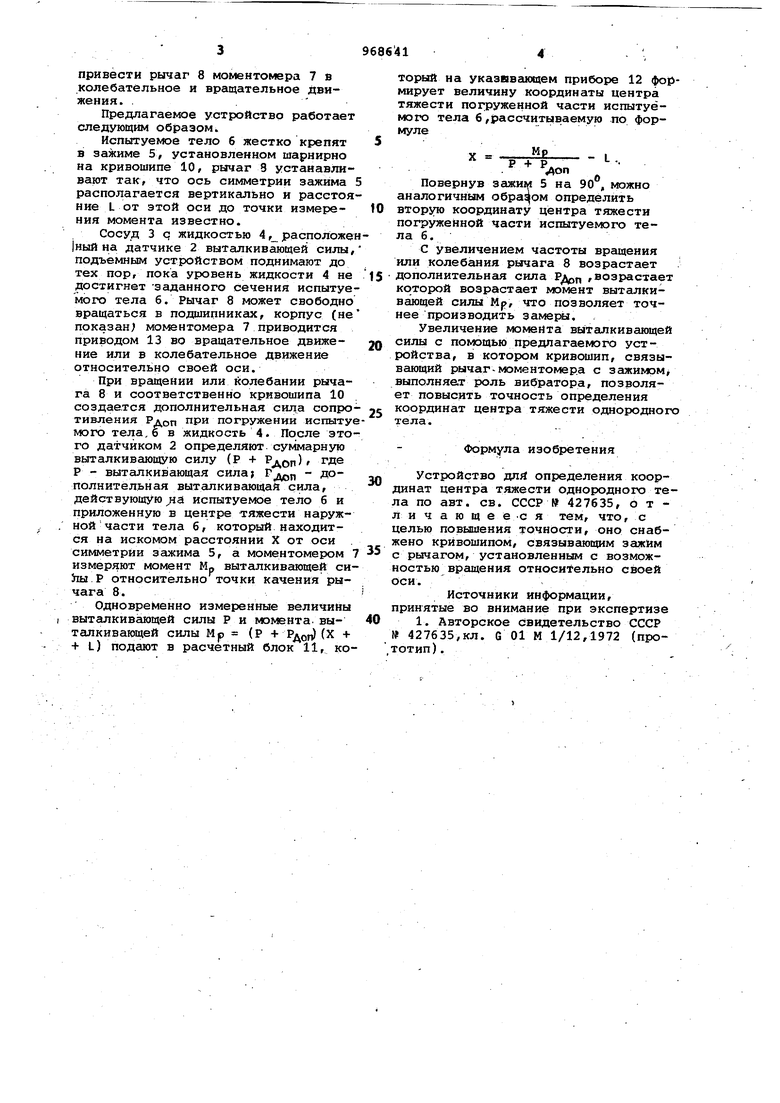
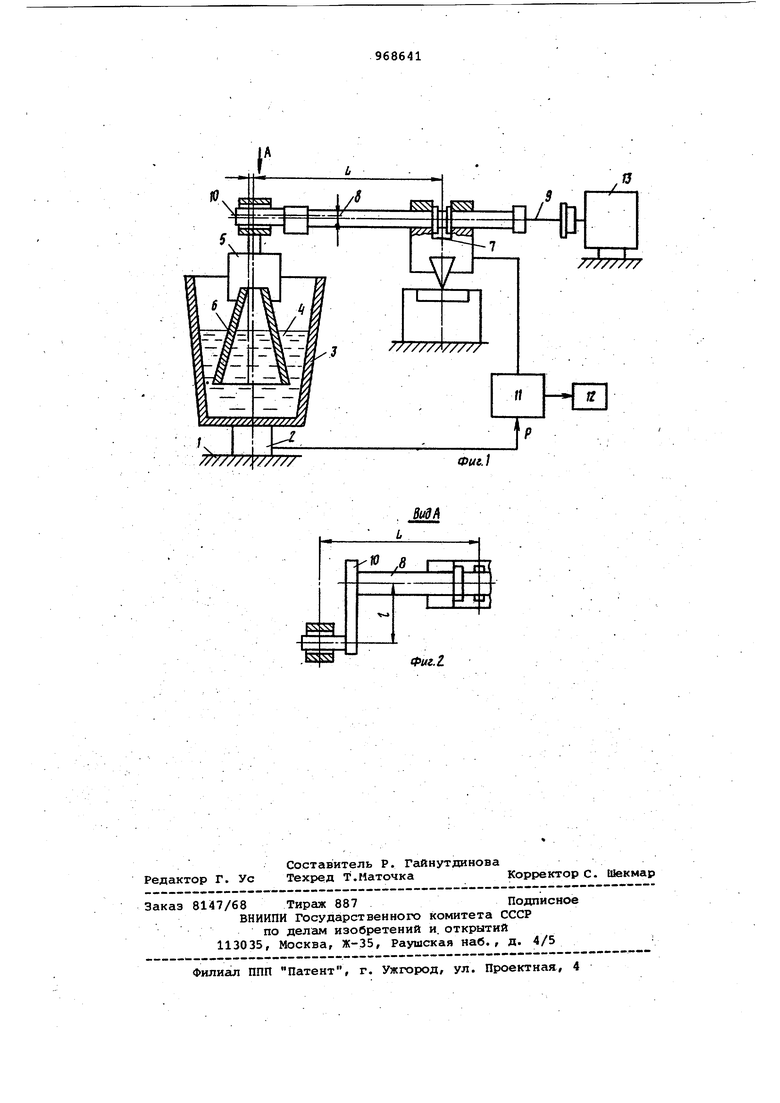
На фиг.1 изображено устройство, общий вид; на фиг.2 - вид А на фиг.1.
Устройство для определения координат центра тяжести однородного тела содержит станину 1, установлен15ный на ней датчик 2 вытсшкивающей силы, сосуд 3 с жидкостью 4, перемещающийся в вертикальном направ.лении посредством подъемного механизма (не показан), зажим 5 для крепления
20 испытуемого тела 6, моментомер 7 с рычагом В и гибким валом 9, кривошип 10, связывающий .зажим 5 с рачагом 8, установленным с возможностью вращения относительно своей ,оси., сис25тему измерения, имеющую расчетный блок 11, размещенный меяСду датчиком 2 выталкивгиощей силы и моментомером 7, и указывающий прибор 12. Устройство содержит также привод 13, с которым соединен гибкий вал 9, позволякедий
30
привести рычаг 8 моментомера 7 в колебательное и вращательное Движения. .
Предлагаемое устройство работает следующим образом.
Испытуемое тело б жестко крепят 5 в зажиме 5, установленном шарнирно на кривошипе 10, рычаг 8 устанавли вают так, что ось симметрии Зс1жима 5 располагается вертикально и расстояние L от этой оси до точки иэмере- 10 ния момента известно.
Сосуд 3 с; жидкостью 4,расположен|ный на датчике 2 выталкивающей силы, подъемным устройством поднимают до тех пор, пока уровень жидкости 4 не 15 достигнет -заданного сечения испытуемого тела б. Рычаг 8 может свободно вращаться в подаиипниках, корпус (не показан) моментомера 7 приводится приводом 13 во вращательное движе- 20 ние или в колебательное движение относительно своей оси.
При вращении или Колебании рычага 8 и соответственно кривошипа 10 создается дополнительная сопро- 25 тивления Рдоп при погружении испытуемого тела,б в жидкость 4. После этого датчиком 2 определяют суMMapHjTO выталкивающую силу (Р + Д® Р - выталкивающая сила Гдоп Я° an полнитёльная выталкивающай сила, действующую на испытуемое тело б и приложенную в центре тяжести наружной части тела б, который находится на искомом расстоянии X от оси симметрии зажима 5, а моментомером 7 измеряют момент М выталкивающей Р относительно точки качения рычага 8.
Одновременно измеренные величины выталкивающей силы Р и момента, вы- 40 талкивающей силы Мр (Р + Рдог) (X + + L) подают в расчетный блок 11, который на указввёиощем приборе 12 формирует величину координаты центра тяжести погруженной части испытуемого тела б,рассчитываемую по формуле
Мр
I
Р + Р
Лоп
Повернув зажим 5 на 90 , можно аналогичным образом определить вторую координату центра тяжести погруженной части испытуемого тела б.
С увеличением частоты вращения или колебания рычага 8 возрастает дополнительная сила ,возрастает которой возрастает момент выталкивающей силы Мр, что позволяет точнее производить замеры.
Увеличение момента выталкивающей силы с помощью предлагаемого устройства, в котором кривошип, связывающий рычаг-моментомера с згжямрм выполняет роль вибратора, позволяет повысить точность определения координат центра тяжести однородног тела.
Формула изобретения
Устройство дли определения координат центра тяжести однородного тела по авт. св. СССР № 427635, о т л и ч а ю щ е е С я тем, что, с целью повышения точнсэсти, оно снабжено кривошипом, связывающим заЖИм с рычагом, установленным с возможностью вращения относительно своей оси.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 427635,кл. G 01 М 1/12,1972 (прототип) .
fa
///////у/// /7
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат центра тяжести однородного тела | 1971 |
|
SU357844A1 |
| Способ определения координатцЕНТРА ТяжЕСТи ОдНОРОдНОгО ТЕлА | 1979 |
|
SU807089A1 |
| Устройство для определения координат центра тяжести однородного тела | 1972 |
|
SU427635A1 |
| Устройство для измерения массы жидкости в цилиндрическом резервуаре | 1982 |
|
SU1045002A1 |
| Устройство для испытания подшипников качения на долговечность | 1990 |
|
SU1723481A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331865C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ДВИЖЕНИЯ В ЖИДКОСТИ, В ОСОБЕННОСТИ НА ЕЕ ПОВЕРХНОСТИ | 1991 |
|
RU2109262C1 |
| Горизонтальный крутильный маятник для определения динамических характеристик эластомеров | 1988 |
|
SU1679278A1 |
| Способ определения веса отдельных частей неразделимого объекта | 1989 |
|
SU1703988A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ЧАСТИ ОДНОРОДНОГО ТЕЛА | 1973 |
|
SU380976A1 |
SudA
Фиг. 2.
