Изобретение относится к весоизмерительной технике и может быть использовано для измерения массы жидкости в резервуаре, например .нефти и т.п.
Известно устройство для измерения массы жидкости в резервуаре, содержащее датчик силы, погружаемый элемент блок цифрового преобразования сигнал датчика, и блок регистрации, причем погружаемый элемент имеет профиль, задаваемый нелинейной характеристико датчика силы,. Измерение массы жидкости в этом случае проводится с промежуточным преобразованием ее в выталкива ющую силу 1 .
Недостаток указанного устройства низкая точность, обусловленная как вносимой нелинейностью предварительного преобразования массы в выталкивающую силу погрешностью от изменения плотности жидкости, так и малым динамическим диапазоном, который ограничен диапазоном датчика силы,
Наиболее близким по технической сущности к предлагаемому является устройство для измерения массы жид-: кости в цилиндрическом резервуаре, содержащее датчик силы, подключенный к блоку цифрового преобразования сиг нала, и погружаемый элемент 2,
Недостаток известного устройства заключается в неудовлетворительной точности измерения, которая обусловлена большим диапазоном измерения датчика силы.
Цель изобретения - повышение точности путем уменьшения диапазона измерения датчика, силы,
Поставленная цель достигается тем, что в устройство для измерения массы жидкости в цилиндрическом резервуаре, содержащее датчик силы,, подключенный к блоку цифрового преобразования сигнала, и погружаемый элемент, введены равноплечий рычаг, взаимодействующий с датчиком силы, и дополнительный погружаемый элемент, причем оба погружаемых элемента выполнены в виде тел с периодически изменяющимся по высоте профилем и закреплены на противоположных концах равноплечего рычага таким образом, что профиль одного сдвинут по высоте относительно профиля другого на половину периода изменения их профиля,
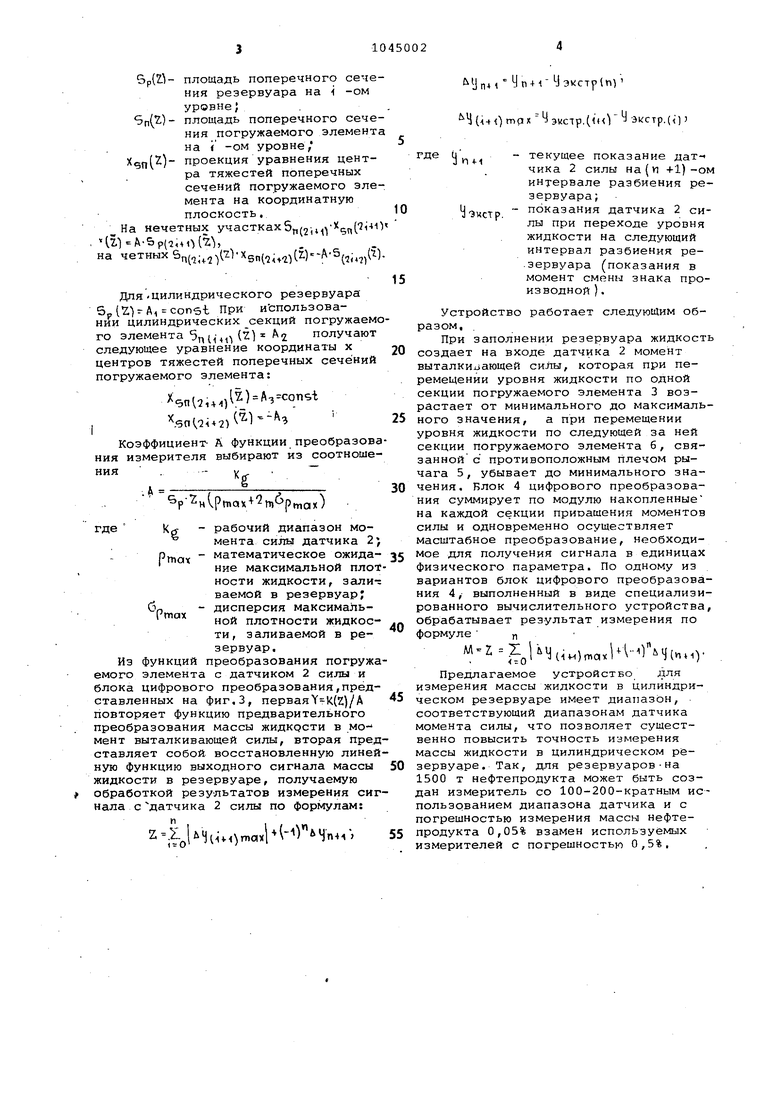
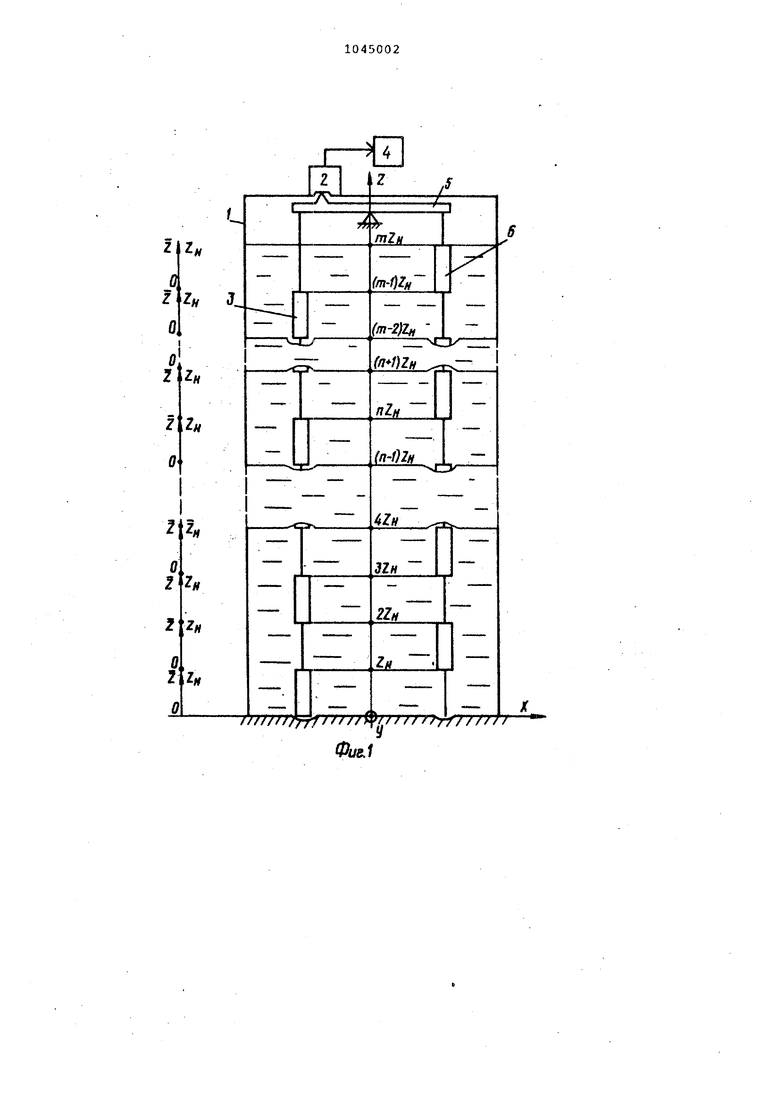
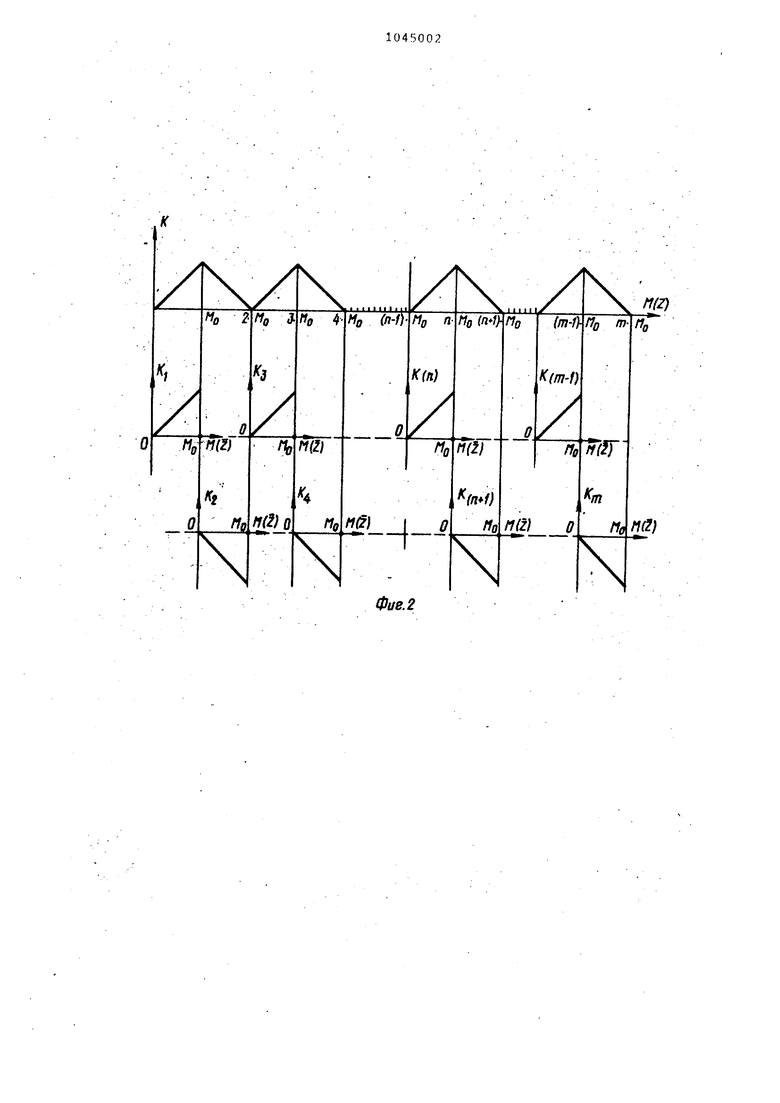
На Фиг,1 показана схема предлс1гаемого устройства на фиг,2 - графики Функции предварительного преобразования массы жидкости в момент выталкивания силы и ее составляющих на интёрвалах разбиения резервуара по высоте; на фиг,3 а, б - графики функции преобразования погружаемого элемента с датчиком силы и блока цифро.вого преобразования.
Устройство содержит цилиндрический резервуар 1, датчик 2 силы, погружаемый элемент 3, блок 4 цифрового преобразования сигнала, выполненный, например, в виде специализированного вычислительного устройства, равноплечий рычаг 5 и дополнительный погружаемый элемент б.
Погружаемые элементы 3 и 6 выполнены в виде тел с периодически изменяющимся по высоте профилем и закреплены на противоположных концах рычага. 5 таким образом, что профиль одного сдвинут по высоте относительно .профиля другого на половину интервала, соответствующего целому периоду изменения профиля погружаемого элемента.
Такое устройство предста вляет собой многодиапазонный иммерсионизмеритель массы жидкости в цилиндрическом резервуаре с предварительным кусочно-линейным преобразованием массы жидкости в момент выталкивающей силы и линейным преобразованием момента силы в выходной сигнал.
Момент выталкивающей силы, действующей на находящуюся в жидкости часть погружаемого элемента(фиг.2), определяют выражениями:
(...,.
) ЛоМ(2;)) Z-2-2.7. к ) -AW(,1,2,...,M,...,ni,
де йц - интервсш разбиения
резервуара;
i - -номер интервала разбиения, резервуара; K(Z)- момент выталкивающей силы, действующей на погружённую в жидкость часть погружаемого элемента,
, М xZ) - масса жидкости, на ин тервале разбиения ререзвуара}
А - коэффициент функции предварительного преобразования, А const..
Для расчета погружаемого элемента спользуют соотношения:
2
2l pJ|JxcJx 3i,,d(--pfx j2n i . ° 6;(z
о .f
2
() f i bp-JM ldz,
где kq - статический момент попе- : сечений погружаемого элемента относительно координатной плоскости; 5р(Й- площадь поперечного сече ния резервуара на i -ом уровне; . 5п() - площадь поперечного сече ния погружаемого элемент на i -ом уровне/ Xgf,(2) проекция уравнения центра тяжестей поперечных сечений погружаемого элемента на координатную плоскость, На нечетных участках5у,(2-ц 9п( ЧгЬА-5рС2,+ л№, на четных %(,;,2l(VXsn(,,,(I)-A-5,;( Для-цилиндрического резервуара 5р i)-А, соп5-Ь При использовании цилиндрических секций погружаемо го элемента SntiMi (i) получают следующее уравнение координаты х центров тяжестей поперечных сечений погружаемого элемента: 5пи,.)ЬАз соп9-Ь I..2)b Коэффициент- А функции преобразова ния измерителя выбирают из соотношения . - V р нчртах + ) - рабочий диапазон момента силы датчика 2) Ртах математическое ожидание максимальной плот ности жидкости, зали-: ваемой в резервуар; - дисперсия максимальной плотности жидкоети, заливаемой в резервуар. Из функций преобразования погружа емого элемента с датчиком 2 силы и блока цифрового преобразования,представленных на фиг,3, перваяY K(Z)/A повторяет функцию предварительного преобразования массы жидкрсти в момент выталкивающей силы, вторая пред ставляет собой восстановленную линей ную функцию выходного сигнала массы жидкости в резервуаре, получаемую t обработкой результатов измерения сиг нала с датчика 2 силы по формулам; z-iol i Уп+ у п + 1 Уэ«стр1п) 4(441) max Чэкс1р.( .()5 текущее показание дат-« чика 2 силы на(м +1)-ом интервале разбиения резервуара;показания датчика 2 силы при переходе уровня жидкости на следующий интервал разбиения ре.зервуара (показания в момент смены знака производной ). Устройство работает следующим образом. При заполнении резервуара жидкость создает на входе датчика 2 момент выталкивающей силы, которая при перемещении уровня жидкости по одной секции погружаемого элемента 3 возрастает от минимального до максимального значения, а при перемещении уровня жидкости по следующей за ней секции погружаемого элемента 6, связанной с противоположным плечом рычага 5, убывает до минимального значения. Блок 4 цифрового преобразования суммирует по модулю накопленные на каждой секции припащения моментов силы и одновременно осуществляет масштабное преобразование, необходимое для получения сигнала в единицах физического параметра. По одному из вариантов блок цифрового преобразования 4, выполненный в виде специализированного вычислительного устройства, обрабатывает результат измерения по формуле п .Mlr.)Предлагаемое устройство для измерения массы жидкости в цилиндрическом резервуаре имеет диапазон, соответствующий диапазонам датчика момента силы, что позволяет существенно повысить точность измерения массы жидкости в цилиндрическом резервуаре. Так, для резервуаровна 1500 т нефтепродукта может быть создан измеритель со 100-200-кратным использованием диапазона датчика и с погрешностью измерения массы нефтепродукта 0,05% взамен используемых измерителей с погрешностью 0,5%,
MO 2fffl 4
tia J
Кз
К(гп-П
KM
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки жидкостных расходомеров с аналоговым электрическим выходным сигналом | 1984 |
|
SU1267166A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫ ЖИДКОСТИ В РЕЗЕРВУАРЕ | 1991 |
|
RU2033597C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКИХ СРЕД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2331865C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ РЕЗЕРВУАРОВ И УРОВНЯ ЖИДКОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2071596C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ РАСХОДА ТОПЛИВА | 1992 |
|
RU2097707C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ И ПЛОТНОСТИ | 1991 |
|
RU2047845C1 |
| Автономный дрейфующий профилирующий океанологический буй | 2015 |
|
RU2609849C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ И ДАТЧИК ИЗМЕРЕНИЯ ПЛОТНОСТИ (ВАРИАНТЫ) С ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ (ВАРИАНТЫ) И БЛОКОМ УПРАВЛЕНИЯ (ВАРИАНТЫ) | 2010 |
|
RU2503946C2 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ ГАЗОВ И ЖИДКОСТЕЙ | 1992 |
|
RU2008650C1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫ ЖИДКОСТИ В ЦИЛИНДРИЧЕСКОМ РЕЗЕРВУАРЕ, содержащее датчик силы, подключенный к блоку цифрового преобразования сигнала, и погружаемый элемент, отличающееся тем, что,с целью повышения точности путем уменьшения диапазона измерения датчика силы, в него введены равноплечий рычаг, взаимодействующий с датчиком силы, и дополнительный погружаемый элемент, причем оба погружаемых элемента выполнены в виде тел с периодически изменяющимся по высоте профилем и закреплены на противо положных концах равноплечего рычага таким образом, что профиль одного сдвинут по высоте относительно профиля другого На половину периода измен нения их профиля. «g 
mi)
mi)
w.
Kt
m) 0
tit
Jh
Т{1Г
Щ2)
n.
По
) t1a
m
flffflff)
nd) О
/
/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения массы жидкости | 1973 |
|
SU478194A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения массы жидкости в резервуаре произвольной формы | 1975 |
|
SU634110A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
