(54) ГИДРАВЛИЧЕСКАЯ РУЛЕВАЯ МАШИНА

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая рулевая машина | 1977 |
|
SU737292A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969594A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969595A1 |
| Гидравлический привод судовой рулевой машины | 1977 |
|
SU695896A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1105392A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969596A1 |
| Нагружающее устройство для испытанияРулЕВыХ МАшиН | 1979 |
|
SU844482A1 |
| Гидравлическая судовая рулевая машина | 1981 |
|
SU958227A1 |
| Гидравлическая рулевая машина | 1980 |
|
SU893725A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU738944A1 |
t
Изобретение относится к судостроению, в частности, к гидравлическим машинам. .
Известна гидравлическая рулевая машина, содержгидая силовой исполнительный многокамерный механизм, гидравлически связанный с трехпоэицион.ным распределителем и насосом и кинематически связанный с румпелем,копир и конечные выключатели{дД.
Недостатком такой рулевой машины является то, что распределительное устройство обеспечивает получение максимального числа ступегкзй регулирования рабочего объема исполнительного механизма, .равного трем. При этом числе ступеней для некоторых режимов нагружения рулевых устройств не удается получить требуемое быстродействие рулевой машины без увеличения установочной мощности насоса и обеспечить плайность регулирования кинематических и нагрузочных характеристик гидравлического привода, работа которого может сопровождаться относительно болшими скачками скорости движения подвижного плунжера и перепада давления в его магистралях, снижающими надежность рулевой машины.
Цель изобретения - повышение быстродействия и надежностирулевой машины и уменьшение потребной производительности насоса.
Для достижения цели машина снабжена дополнительным копиром, взаимодействующим с исполнительным механизмом, и дополнительным конечным выключателем, связанным с электро0магнитным гидравлическим двухпозиционным распределителем, четыре входа которого гидравлически соединены с рабочими камерами силового исполнительного механизма, одна пара входов - с выходами трехпозиционного
распределителя, а другая пара входов- с насосом и входами трехпозиционного распределителя.
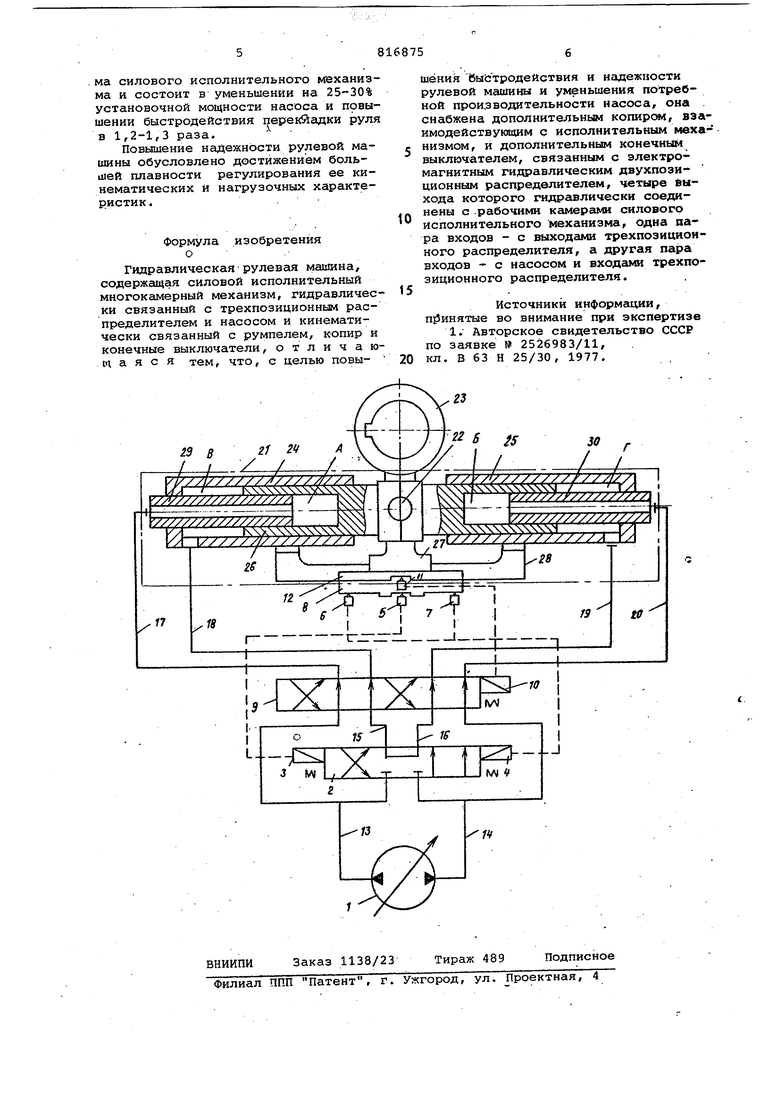
На чертеже изображена принципиаль0ная схема двухцилиндровой рулевой машины с четырехкамерным плунжерным исполнительным механизмом.
Гидравлическая рулевая машина содержит насос 1, трехпозицирнный рас5пределитель 2 с электромагнитами 3 и 4, управляемый от конечных выключателей 5-7 и копира 8, двухпозицион.ный распределитель 9 с электромагнитом 10, управляемый от конечного выключателя 11 и копиоа 12, соеди0
нительные трубопроводы 13-20, силовой исполнительный механизм 21 с шарнирной передачей 22 к румпелю 23.
Силовой исполнительный механизм состоит из двух цилиндров 24 и 25, подвижного плунжера 26, Связанного шарнирной передачей с румпелем и ползуном 27 с направляющей бгшкой 28 и неподвижных плунжеров 29 и 30, соединенных неподвижно с цилиндрами и входящих в расточки подвижного плунжера. На подвижном ползуне установлены упомянутые выше копиры, а на направляющей балке - конечные выключатели ,
Механическая передача между подвижным плунжером и румпелем может быть кулисной, реечной или кривошипно-шатунной,. Неподвижные плунжеры, подвижный плунжер и цилиндры образуют между собой герметичные центральные А, Б и кольцевые В, Г рабочие камеры.
Распределитель 9 установлен таким образом, что его четыре входа гидравлически соединены трубопроводами 1720 с рабочими камерами силового исполнительного механизма, одна пара входов связана трубопроводами 15 и 16 с выходами распределителя 2, а другая пара входов - трубопроводами 13 и 14 с магистралями насоса и входами распределителя 2.
Работа рулевой машины при перекладке-руля на правый борт происходит в следующей последовательности.
В среднем положении руля - выключатели 5-7 и 11 нормально разомкнуты электромагниты 3 и 4 и 10 обесточены, золотник распределителя 9 находится в левом положении, а золотник распределителя 2 - в среднем положении .
При Зсщании угла перекладки на правый борт рабочая жидкость от нагнетающей магистрали насоса 1 через трубопровод 13, распределитель 9 и трубопровод 17 поступает в центральную камеру А механизма.21 и сливаетс из камеры Б через трубопровод 20, распределитель 9 и трубопровод 14 во всасывающую магистраль насоса 1. При этом рабочая жидкость из камеры Г переливается через трубопроводы 1-9, 16, 15. и 18 и распределители 9 и 2 в камеру. На первой ступени регулирования эффективная площадь силового исдолнительного механизма назначается наименьшей и перекладка руля производится с максимальной угловой скоростью.
При достижении рулем определенного угла перекладки копиры 8 и 12 взаимодействуют с выключателями 6 и 11, которые подключают к сети электромагниты 3 и 10 . Золотник распределителя 9 переводится в правое,а золотник распределителя 2-в левое положение, при этом обеспечивается дифференциальное подключение рабочих камер ВиБ к нагнетающей и камер Г и А к всасывающей магистрали насоса 1, Происходит увеличение эффективной площади силового исполнительного механизма, соответствующе разнице площадей кольцевых и центральных рабочих камер. Перекладка руля на второй ступени регулирования производится с уменьшенной уг.ловой скоростью.
При дальнейшей перекладке копир 12 остается во взаимодействии с выключателем 11, а золотник распределителя 9 удерживается в правом положении (электромагнит 10 подключен к питанию). При достижении определенного угла перекладки выключатель 5 выходит из взаимодействия с копиром 8, электромагнит 3 обесточивается и золотник распределителя 2 выводятся в среднее положение. При этом положении распределителей 9 и 2 камеры А и Б шунтируются между со-г бой через трубопроводы 20, 16,-15 и 17, а камеры В и Г через трубопроводы 18, 13 и 19,.14 соединяются с нагнетающей и всасывающей магистралями насоса. Происходит увеличение эффективной площади, соответствующей площади кольцевых камер, в связи с чем перекладка руля на третьей ступени регулирования произво-. дится с уменьшенной угловой скоростью.
В дальнейшем копир 8 входит во взаимодействие с выключателем 7, подключается к сети электромагнит 4 и золотник распределителя 2 выводится в правое положение. При этом положении распределителей 9 и 2 камеры В и А через трубопроводы 17, 18 и 13, 15 соединяются с нагнетающей магистралью насоса 1, а каМеры Г и Б через трубопроводы 19, 20 и 14, 16 - со всасывающей магистралью. Происходит увеличение эффективной площади, соответствующей сумме площадей кольцевых и центральных камер, в связи с чем перекладка руля на четвертой Ьтупени регулирования производится с минимальной скоростью.
При перекладке руля с правого борта в среднее положение взаимодействи выключателей 7, 5 и. 11.с копирами 8 и 12 и регулирование исполнительного механизма .происходит в обратной последовательности.
Перекладка руля из среднего положения на левый борт и обратно производится при аналогичном взаимодействии выключателей 5, 6 и 11 с копирам 8 и 12 и с учетом того обстоятельств что нагнетающая и всасывающая магистрали насоса меняются местами.
Технико-экономический эффект, обепечиваемый новой совокупностью признаков предлагаемой рулевой машины, достигается за счет увеличения числа ступеней регулирования рабочего объема силового исполнительного механизма и состоит в уменьшении на 25-30% установочной мощности насоса и првышении быстродействия перекйадки руля в 1,2-1,3 раза.
Повышение надежности рулевой машины обусловлено достижением большей плавности регулирования ее кинематических и нагрузочных характеристик.
Формула изобретения
о .
Гидравлическая рулевая машина, содержадая силовой исполнительный многокамерный механизм, гидравлически связанный с трехпозиционным распределителем и насосом и кинематически связанный с румпелем, копир и конечные выключатели,отличающ а я с я тем, что, с целью повышёния быйтродействия и надежности рулевой машины и уменьшения потребной производительности насоса, она . снабжена дополнительным копкрсян, азаимодействуюощм с исполнительным механизмом, и дополнительным конечным выключателем, связанным с электромагнитным гидравлическим двухпозиционным распределителем, четыре йыхода которого гидргшлическн соединены с .рабочими камерами силового
0 исполнительного механизма, одна пара входов - с выходами трехпозиционного распределителя, а другая пара входов - с насосом и входаш трехпозиционного распределителя.
5
Источники информации, принятые во внимание при экспертизе
0 кл. В 63 Н 25/30, 1977.
17
18
X
,i
X
3 W
Г9
&
J I
ТГ-1Г ГГ {.
I
) I
le
I
ь
м t
ft
