(54) ГИДРАВЛИЧЕСКАЯ РУЛЕВАЯ МА1Т1ИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая рулевая машина | 1981 |
|
SU969594A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969596A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU948773A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU770927A1 |
| Гидравлическая рулевая машина | 1980 |
|
SU880882A1 |
| Электрогидравлическая рулевая машина | 1986 |
|
SU1320122A1 |
| Устройство для управления электрогидравлической многокамерной рулевой машиной | 1983 |
|
SU1123938A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU998233A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU994341A1 |
| Электрогидравлическая рулевая машина | 1983 |
|
SU1122555A1 |
Изобретение относится к судостроению, в частности к гидравлическим руле вьом машинам.
Известна гидравлическая рулевая машина, содержащая силовой исполнительный многокамерный механизм, связанный гидравлическими магистралями с насосом и трехпозиционным распределителем с электромагнитным управлением, устройство управления распре делелителем, включающее блок питания, задерживающие цепочки, тиристорный переключающий блок постоянного тока с тиристор-ами включения и выключения электромагнитов распределителя 1 .
Недостатком известной гидравлической рулевой машины является малая скорость перекладки рупя.
Цель изобретения - повышение скорости перекладки руля.
Поставленная цель достигается тем, что устройство управления распределителем содержит пороговый элемент перепада давления с двумя пропорциональными датчиками давления, двухходовой клапан переключения, дифференциальный измерительный усилитель, два , компаратора и два тиристорных оптрона, причем упомянутые пропорциональные датчики давления свя- , заны гидравлически через двухходовой клапан переключения с нагнетающей и всасывающей магистралями насоса, выходы пропорциональных датчиков давления подключены к входам дифференциального измерительного усилителя, а выход последнего соединен с входами компараторов, выходы которых под10ключены к входам тиристорных оптронов, при этом аноды тиристоров последних подключены к блоку питания, а.катоды их подключены к задерживающим цепочкам.
15
Кроме того, дифференциальный измерительный усилитель содержит три операционных усилителя с резисторами на выходе, а каждый компаратор содержит операционный усилитель с ре20зисторными делителями напряжения.
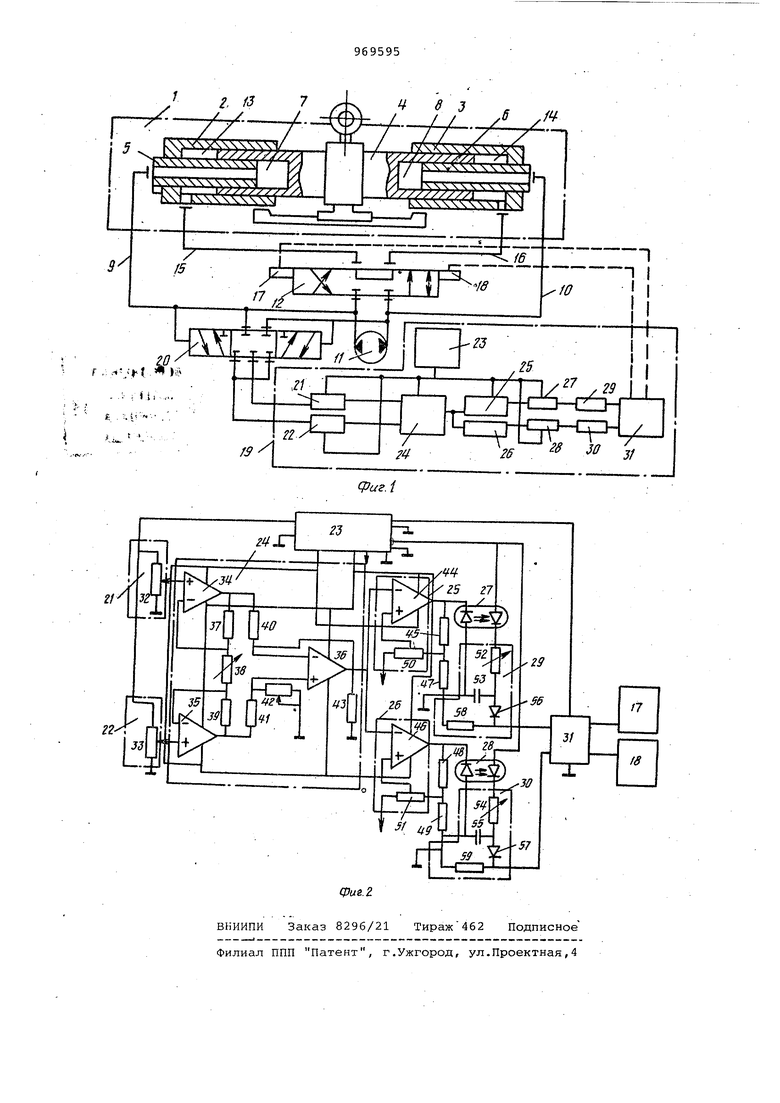
На фиг.1 изображена принципиальная схема предлагаемой гидравлической рулевой машины на фиг.2 - электрическая схема устройства управления
25 распределителем.
Гидравлическая рулевая машина (фиг.1) содержит силовой исполнительный многокамерный механизм 1, включающий в себя цилиндры 2 и 3, под- 30 вижный плунжер 4, взаимодействующий
через механическую передачу с румпелем, и неподвижные плунжеры 5 и б, закрепленные в цилиндрах и установленные в расточках подвижного плунжера Цилиндры, подвижные и неподвижные плунжеры образуют четыре рабочие камеры; нешунтированные камеры 7 и 8, гидравлически связанные трубопроводами 9 и 10 с насосом 11 и трехпоцизионным распределителем 12, и шунтированные камеры 13 и 14, соединенные с трубопроводами 15 и 16 также с т,рехпозиционным распределителем. Трехпозиционный распределитель 12 выполнен с электромагнитами 17 и 18 переключения, электрически связанными с устройством-19 электрического управления трехпозиционным распределителем.
Устройство 19 управления распределителем (фиг.1 и 2) содержит двухходовой клапан 20 переключения, соединяющий нагнетающую и сливную магистрали насоса 11 с .пороговым элементом перепада давления, включающим пропорциональные датчики 21 и 22 минимального и максимального сигналов давления. Датчики 21 и.22 давления и все остальные элементы схемы получают питание от стабилизированного источника 23 питания. Выходы датчиков 21 и. 22 давления соединены с входами дифференциального измерительного усилителя 24, выход которого, в свою очередь, соединен с входами компараторов 25 и 26. Выходы компараторов 25 и 26 подключены к входам тиристорных оптронов 27 и 28, тиристоры которых подключены к источнику 23 питания и к задерживающим цепочкам 29 и 30. С выходов задерживающих.цепочек 29 и 30 сигналы поступают на входы бесконтактного тиристорного переключающего блока 31, содержащего тиристоры включения и выключения электромагнитов 17 и 18 распределителя 12.
Датчики 21 и 22 давления (,фиг.2) включают в себя переменные резисторы 32 и 33, сигналы с которых подаются на прямые входы операционных усилителей 34 и 35 дифференциального усилителя 24. Этот усилитель собран на трех операционных усилителях 34 - 36 и резисторах 37 - 42. Уси- лители 34 и 35 являются буферными каскадами, а усилитель 36 - оконечным усилителем. Выходное напряжение с дифференциального усилителя, поступающее на вход усилителя 36, пропорционально разности напряжений, снимаемых с датчиков давления.
Включение резисторов 37 - 39 на выходе усилителя позволяет регулировать коэффициент усиления. Переменный резистор 42 обеспечивает предварительную регулировку cxeivfci, позволяя сбалансировать любое синфазное напряжение, т.е. исключить влияние помехи, которая возможна в случае большой длины, проводов от датчиков давления 21 и 22.
Усилитель 36 с резисторами 40 и 41, имеющими равное сопротивление, образует дифференциальный усилитель с коэффициентом усиления, равным 1, и нагружен на резистор 43.
0 На операционных усилителях 44 и 45 собраны компараторы 25 и 26 с положительной обратной связью, которая обеспечивает быстрое переключение с положительной полярности на
5выходе на отрицательную полярность и o6paTHCf в зависимости от величины и знака сигнала на входе, а также исключает ложные срабатывания. Резисторы 46 - 49 служат дпя выбора
Q глубины обратной связи.
Сигналы максимального и минимального пороговых уровней срабатывания подаются на прямой вход усилителей 44 и 45 с резистивных делителей 50 и 51
5 и 47 и 49 напря:жёния соответственно.
С выходов компараторов 25 и 26 сигналы поступают на входы оптронов 27 и 28, которые подключают задерживающие цепочки 29 и 30 к блоку 23 питания. Задерживающие цепочки 29 и 30 собраны на RC-цепочках ; 52 и 53 и 54 и 55 и динисторах 56 и 57.
От задерживающих цепочек 29 и 30 о сигналы поступают на входы бескон- :
тактного тиристорного переключающего блока 31, осуществляющего требуемую последовательность подключения (.отключения) электромагнитов 17 и 18 : распределителя 12 к блоку 23 питания.
Устройство работает следующим образом.
При подаче питания насоса 11 одновременно к блоку питания через переключающее устройство 31 подключается электромагнит 17, при этом трехпозиционный распределитель 12 занимает левое положение, соединяя рабочие камеры 7и8, 13и14с насоQ сом 11 по дифференциальной схеме. На этой ступени регулирования при задании угла перекладки плунжер 4 перемещается с максимальной скоро- . .
5 Переключение клапана 20 приводит к тому, что при работе рулевой машины с нагнетающей магистралью соединен датчик 21 давления, а с всасывающей магистралью - датчик 22.
0 При перекладке руля и возрастании крутящего момента на баллере увели чиваетсзя давление в нагнетающей магистрали и сигнал, снимаемый с датчика 21 (резистора 32J. Разность
5 сигналов, снимаемых с датчиков 21 и 22, усиливается в дифференциальном измерительном усилителе 24 и подается на входы компараторов 25 и 26. Как только величина разности сиг Исшов становится больше величины верхнего порога операционного усили теля 44, компаратор 25 опрокидывает ся и на его выходе появляется отрицательное напряжение, что приводит к открытию оптрона 27, и сигнал максимального уровня перепада давления через задерживающую цепочку 2 поступает на управляющий электрод тиристора выключения в переключающем блоке 31. Происходит отключение электромагнита 17, и привод рулевой машины переходит на вторую ступень регулирования, скорость перекладки уменьшается. После переключения некоторое вре мя в камерах 13 и 8 (14 и 7) остается давление, равное или несколько меньшее величины максимального порогового уровня, в то время как величина перепада давления уменьшается до значения, несколько большего минимального порогового уровня. Компаратор 25 возвращается в пре нее состояние. При этом не происходит его ложного срабатывания в том случае,если давление в нагнетающей магистрали больше мадсимального порогового уровня, так как сигнал сни JvIaeмый с дифференциального измерительного, усилителя 24, определяется разностью сигналов, снимаемых с дат чиков 21 и 22 (резисторов 32 и 33). При дальнейшей перекладке руля и возрастании перепада давления до максимального порогового уровня сиг нал о его значении поступает через задерживающую цепочку на управляющи электрод тиристора включения в блоке 31, происходит подключение элект ромагнита 18 и привод переходит на третью ступень регулирования. Скорость перекладки становится минимальной, и исполнительный механизм обеспечивает максимальные значения крутящего момента на баллере. При обратной перекладке руля и уменьшении перепада давления до минимального порогового уровня срабатывает компаратор 26 (на выходе усилителя 45 появляется отрицательное напряжение), открывается оптрон 28 и сигнал минимального уровня дав ления поступает через задерживающую цепочку 30 на управляющий электрод тиристора выключения -с блока 31. Пр исходит отключение электромагнита 1 и привод переходит на вторую ступень регулирования. При дальнейшем уменьшении перепа да до величины минимального порогового уровня сигнал б его значении поступает по той же схеме на управляющий электрод тиристора включения в блоке 31. Происходит включение электромагнита 17, и привод переходит на первую ступень регулирования. Технико-экономический эффект предлагаемой рулевой машины заключается в повышении на 20-30% быстродействия перекладки руля и достигается за счет того, что устройство управления распределителем работает по сигналу перепада давления в магистралях. Это исключает ложные срабатывания устройства управления при переключении ступеней регулирования рабочего оСъема исполнительного механизма. Формула изобретения 1.Гидравлическая рулевая машина, содержащая силовой исполнительный многокамерный механизм, связанный гидравлическими магистралями с насосом и трехпозиционным распределителем с электромагнитным управлением, устройству управления распределителем, включающее блок питания, задерживающие цепочки, тиристорный переключающий блок постоянного тока с тиристорами включения и выключения электромагнитов распределителя, отличающаяся тем, что, с целью повышения скорости перекладки руля, устройство управления распределителем содержит пороговый эле-. мент перепада давления с двумя пропорциональными датчиками давления, двухходовой клапан переключения,дифференциальный измерительный усилитель , два компаратора с максимальным и минимальным порогдвыми уровнями срабатывания и два тиристорных оптрона, причем упомянутые пропорциональные датчики давления связаны гидравлически через двухходовой клапан переключения с нагнетающей и всасывающей магистралями насоса, выходы пропорциональных датчиков давления подключены к входам дифференциального измерительного усилителя, а выход последнего соединен с входами компараторов, выходы которых подключены к входам тиристорных оптронов, при этом аноды тиристоров последних подключены к блоку питания, а катоды их подключены к задерживающим цепочкгия. 2.Машина по п. 1, отличающаяся тем, что дифференциальный измерительный усилитель содержит три операционных усилителя с резисторами на выходе, а каждый компаратор содержит операционный усилитель с резистивными делителями напряжения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 770927,кл. В 63 Н 25/30,03.07.78 (прототип).
.. //
/
/7
у гхУу/хИ/
/
J/
S ЭеJU
/ // /
У
7/7
п 1 I
